Giá đỡ MKS Pi cho máy in 3D Ender 3 và hướng dẫn cài đặt Klipper

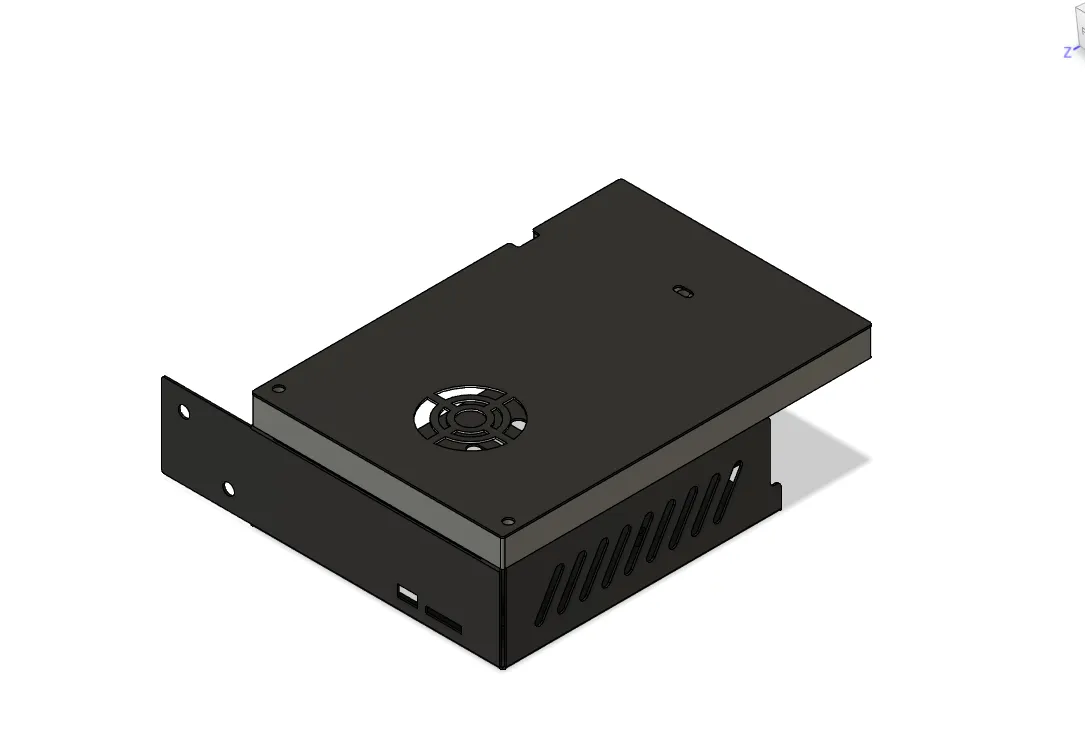
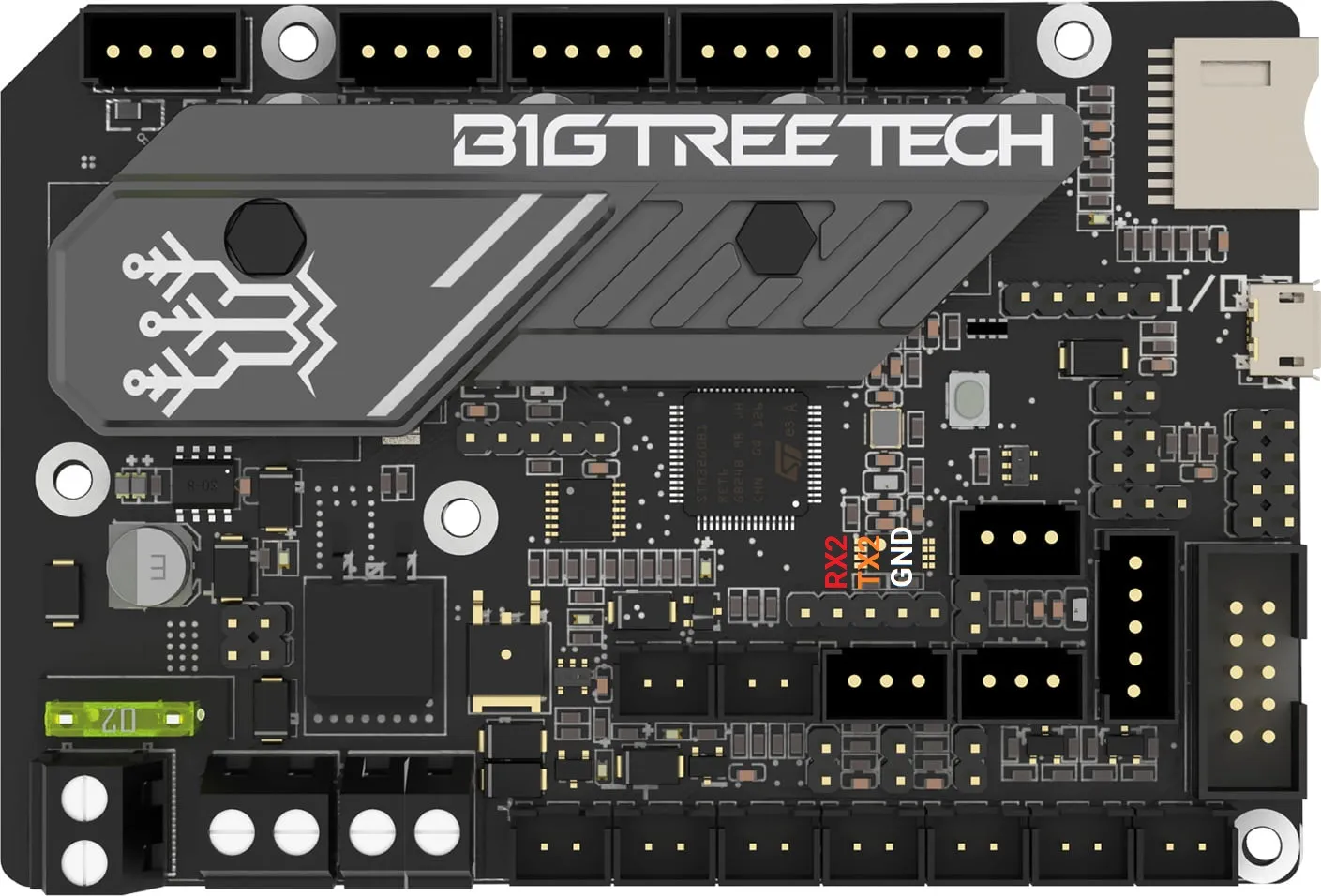
Một giá treo rất đơn giản cho MKS PI - được thiết kế để phù hợp với Ender 3 (mô hình không phải, 2018) với SKR Mini E3 V3.









Mô tả
Danh sách BOM và hướng dẫn liên quan đến việc sử dụng và cài đặt mô hình này vào máy in của bạn hơi bị chôn vùi, hãy cuộn xuống một chút nếu bạn chỉ muốn đến đó. 15/09/2023: Hãy xem vỏ BTT U2C v2.1 của tôi cho Ender 3: https://www.f3d.vn/3d-model/26644-bo-vo-btt-u2c-v21-cho-may-in-ender-3 27/06/2023: Đã thêm phiên bản “mỏng” cao 6 mm - giống như phiên bản gốc, chỉ mỏng hơn 6 mm. Việc thêm ray tuyến tính vào trục Y làm giảm khoảng trống hơn nữa, vì vậy tôi đã phải làm nó mỏng hơn để cho xe Y có thể vượt qua bộ lắp ráp. Dây điện hơi chật, tôi khuyên bạn nên sử dụng phiên bản gốc trừ khi bạn thực sự cần thêm 6 mm khoảng trống như tôi đã làm. 04/06/2023: Hoàn toàn không liên quan đến mô hình, nhưng với mục đích tiết kiệm thời gian và rất nhiều sự thất vọng của bạn: ĐỪNG sử dụng các hình ảnh hệ điều hành do MKS cung cấp. Tôi đã dành nhiều ngày để cố gắng làm cho mọi thứ hoạt động đúng cách, và -nói đơn giản- chúng là một thảm họa. Thay vào đó, hãy tải xuống một hình ảnh hệ điều hành Armbian từ đây: https://github.com/redrathnure/armbian-mkspi Và làm theo những hướng dẫn này để bạn có thể bắt đầu hoạt động: - Tải xuống và giải nén hình ảnh bạn vừa tải xuống. Sau đó, ghi nó vào thẻ SD bằng balena etcher (https://etcher.balena.io/)
- Lưu ý bên: Nếu bạn cần định dạng/xóa bất kỳ dữ liệu nào đã lưu trữ trước đó trong thẻ SD của bạn, bạn có thể sử dụng cái này: https://www.sdcard.org/downloads/formatter/
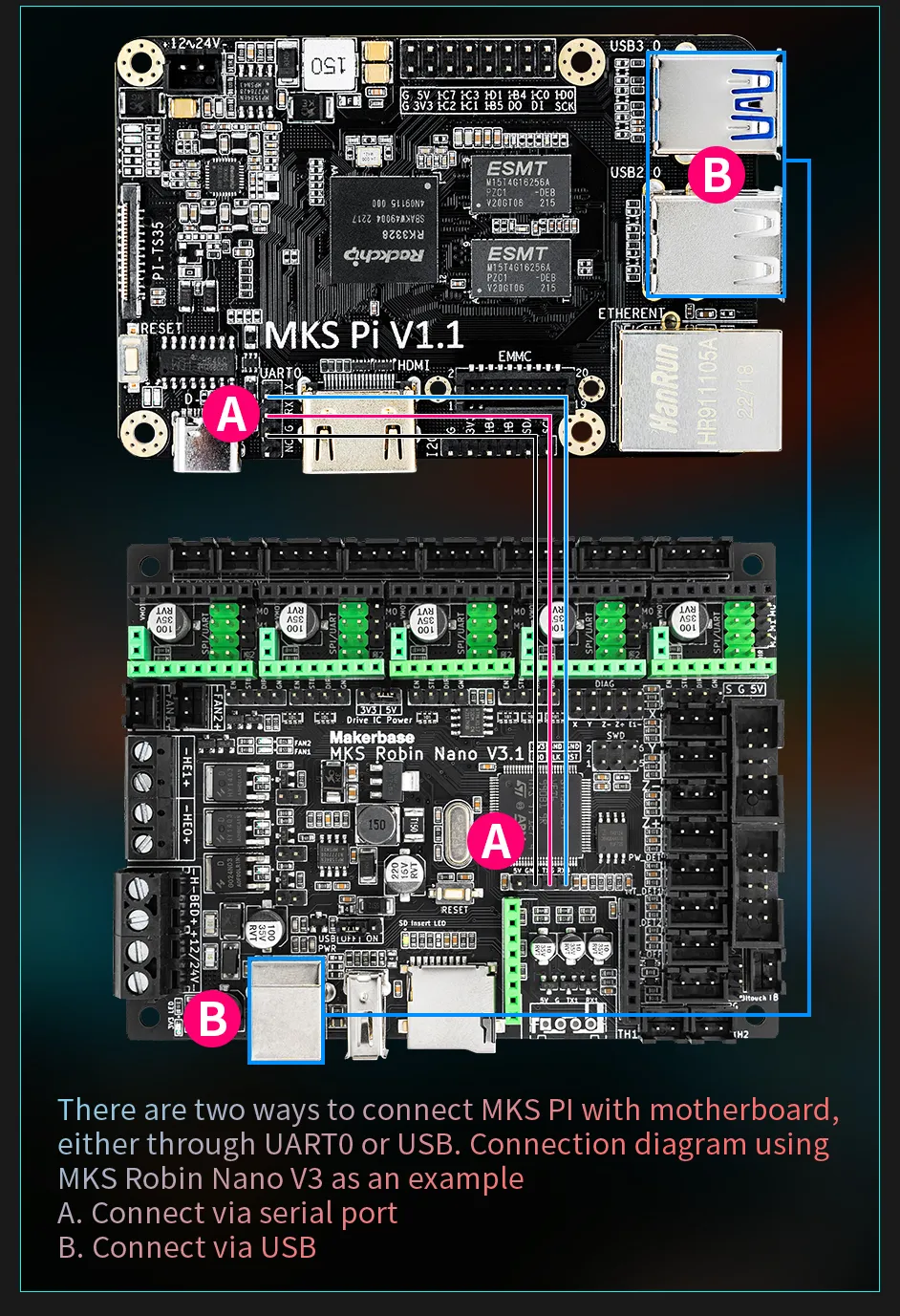
- Khi hoàn tất, hãy cắm thẻ SD của bạn trở lại vào Pi. Một lưu ý về việc sử dụng mô-đun eMMC: Mô-đun đi kèm đã được ghi sẵn với một trong những hình ảnh đã đề cập mà MKS cung cấp trong thư mục Google Drive của họ. Bạn có thể tiếp tục sử dụng Pi với hình ảnh được cung cấp trong eMMC như là và nếu sau khi sử dụng một thời gian và nếu bạn không thấy vấn đề gì khi sử dụng nó như vậy, thì tuyệt vời! Bạn vừa tiết kiệm cho mình rất nhiều rắc rối. Đối với bất kỳ ai khác, tôi phải cảnh báo bạn rằng nếu bạn muốn ghi bất kỳ hình ảnh nào vào eMMC, bạn sẽ cần một máy tính đang chạy Linux, ít nhất là theo kinh nghiệm của tôi. Windows sẽ phát hiện sai mô-đun như một ổ đĩa di động 2 TB và điều đó sẽ khiến mọi nỗ lực ghi hình bootable bằng balena etcher hoặc Rufus (hoặc hầu hết các chương trình “ghi hình để tạo USB bootable” mà tôi đã thử trong tuyệt vọng) vào mô-đun đều thất bại. Ngoài ra, mô-đun eMMC sẽ không hoạt động trừ khi máy tính của bạn có đầu đọc thẻ SD tích hợp. Sử dụng bộ chuyển đổi micro SD kèm theo + bộ chuyển đổi micro SD sang thẻ SD + đầu đọc thẻ SD USB sẽ không hoạt động theo kinh nghiệm của tôi. Cũng có một hoặc hai đánh giá trên Aliexpress tuyên bố điều tương tự, vì vậy tôi tin rằng điều này có thể phổ biến hơn là chỉ là vấn đề kỹ năng của tôi. Khi sử dụng balena etcher trên Linux, kích thước đúng sẽ được phát hiện (khoảng 8 GB) và việc ghi tiếp theo sẽ thành công. Bạn có thể tiếp tục với phần còn lại của hướng dẫn về cách thiết lập Klipper. Kết nối với Pi qua Ethernet: - Bật mọi thứ lên và kết nối với Pi bằng PuTTY (https://www.putty.org/). Bạn có thể lấy địa chỉ IP của Pi qua giao diện web của bộ định tuyến hoặc bằng cách sử dụng một số trình quét IP LAN. Kết nối với Pi qua USB/Serial: - Nếu bạn đang cố gắng kết nối qua serial và bạn đã kết nối Pi với máy tính của mình thông qua cổng USB-C, bạn có thể lấy cổng COM của Pi qua Trình quản lý thiết bị - tốc độ baud phù hợp tôi tin là 1500000. Tiếp tục với việc cài đặt: - Khi PuTTY thiết lập kết nối với Pi, bạn sẽ được yêu cầu đăng nhập. Tài khoản mặc định là “root” và mật khẩu mặc định là “1234”.
- Làm theo phần còn lại của hướng dẫn khi chúng xuất hiện trên màn hình của bạn - sẽ mất một hoặc hai phút để thiết lập mọi thứ. Nếu bạn đã cắm bộ chuyển đổi WiFi USB vào Pi, bạn cũng sẽ được yêu cầu kết nối với WLAN của mình.
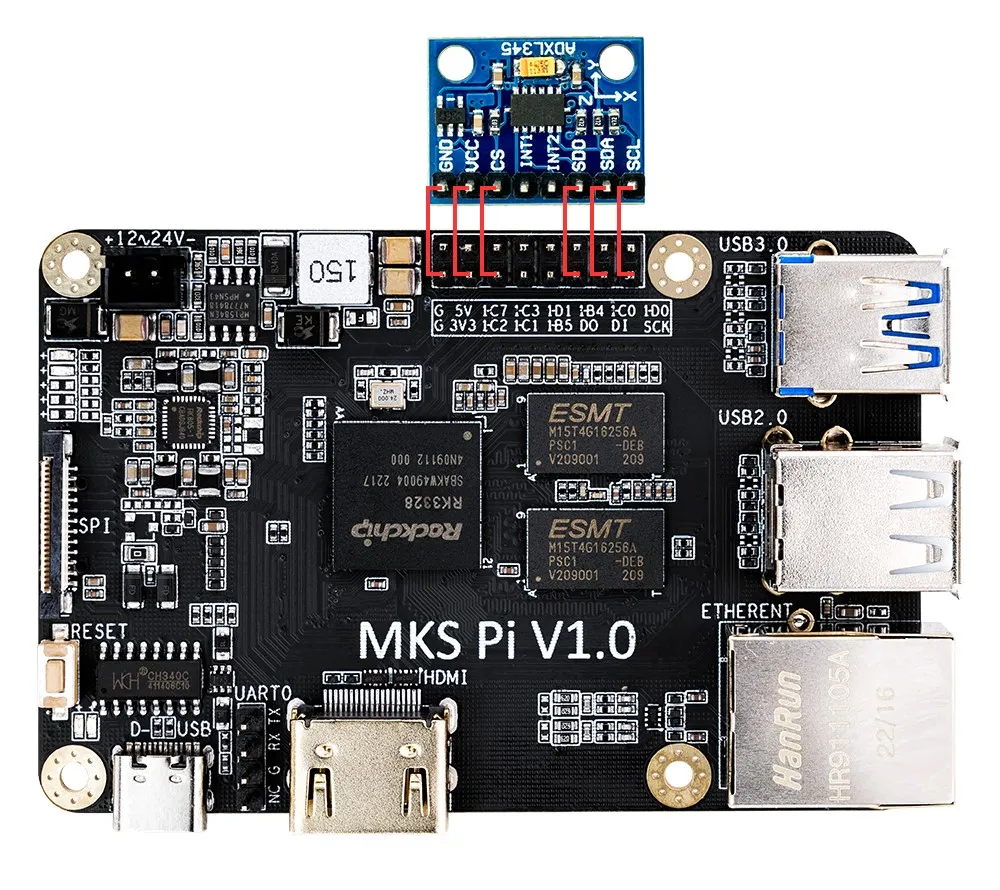
- Khi hoàn tất, cài đặt KIUAH (theo hướng dẫn ở đây: https://github.com/th33xitus/kiauh) và sau đó bạn nên có thể dễ dàng cài đặt Klipper và các công việc còn lại. Thêm hỗ trợ cho ADXL345 (SPI): Theo tài liệu của Klipper (https://www.klipper3d.org/Measuring_Resonances.html & https://www.klipper3d.org/RPi_microcontroller.html?h=rpi#rpi-microcontroller,) chúng ta sẽ phải chạy một vài lệnh để cài đặt và thiết lập một vài thứ nhằm có thể sử dụng cảm biến gia tốc ADXL345 qua giao diện SPI của Pi.
plaintext sudo apt update sudo apt install python3-numpy python3-matplotlib libatlas-base-devĐiều này chỉ cài đặt một thư viện Python mà chúng ta sẽ sử dụng sau này.plaintext ~/klippy-env/bin/pip install -v numpyĐiều này sẽ cài đặt NumPy trong môi trường Klipper.plaintext cd ~/klipper/sudo cp ./scripts/klipper-mcu.service/etc/systemd/system/sudo systemctl enable klipper-mcu.serviceCác lệnh này sẽ cho phép chúng ta sử dụng các chân cần thiết để kết nối ADXL345 với Pi. Khi bạn vẫn đang ở thư mục Klipper, bạn cũng sẽ phải chạy lệnh sau:plaintext make menuconfigKhi cửa sổ xám đó xuất hiện, tất cả những gì bạn cần làm là điều hướng đến “Kiến trúc Bộ điều khiển Vi mô” và sau đó chọn “Quá trình Linux”. Sau đó bạn có thể thoát khỏi cửa sổ và lưu tất cả các thay đổi đã thực hiện. Cuối cùng, chạy tập hợp lệnh sau:plaintext sudo service klipper stop make flash sudo service klipper startTất cả những gì còn lại là thêm các dòng sau vào tệp printer.cfg của bạn: ```plaintext [mcu rpi] serial:/tmp/klipper_host_mcu [adxl345] cs_pin: rpi:None spi_bus: spidev0.2 - Để tên máy bạn vừa nhập có thể được giải quyết khi bạn gõ vào trình duyệt, bạn cần cài đặt avahi daemon bằng cách nhập lệnh sau vào terminal: ```plaintext
sudo apt-get install avahi-daemon
- Bu lông M3 x 6 mm: 4 cái
- Bu lông M3 x 18 hoặc 20 mm: 2 cái
- Bu lông M3 x 30 mm: 1 cái Lắp ráp: 1. In ấn phần (PETG được khuyến nghị).
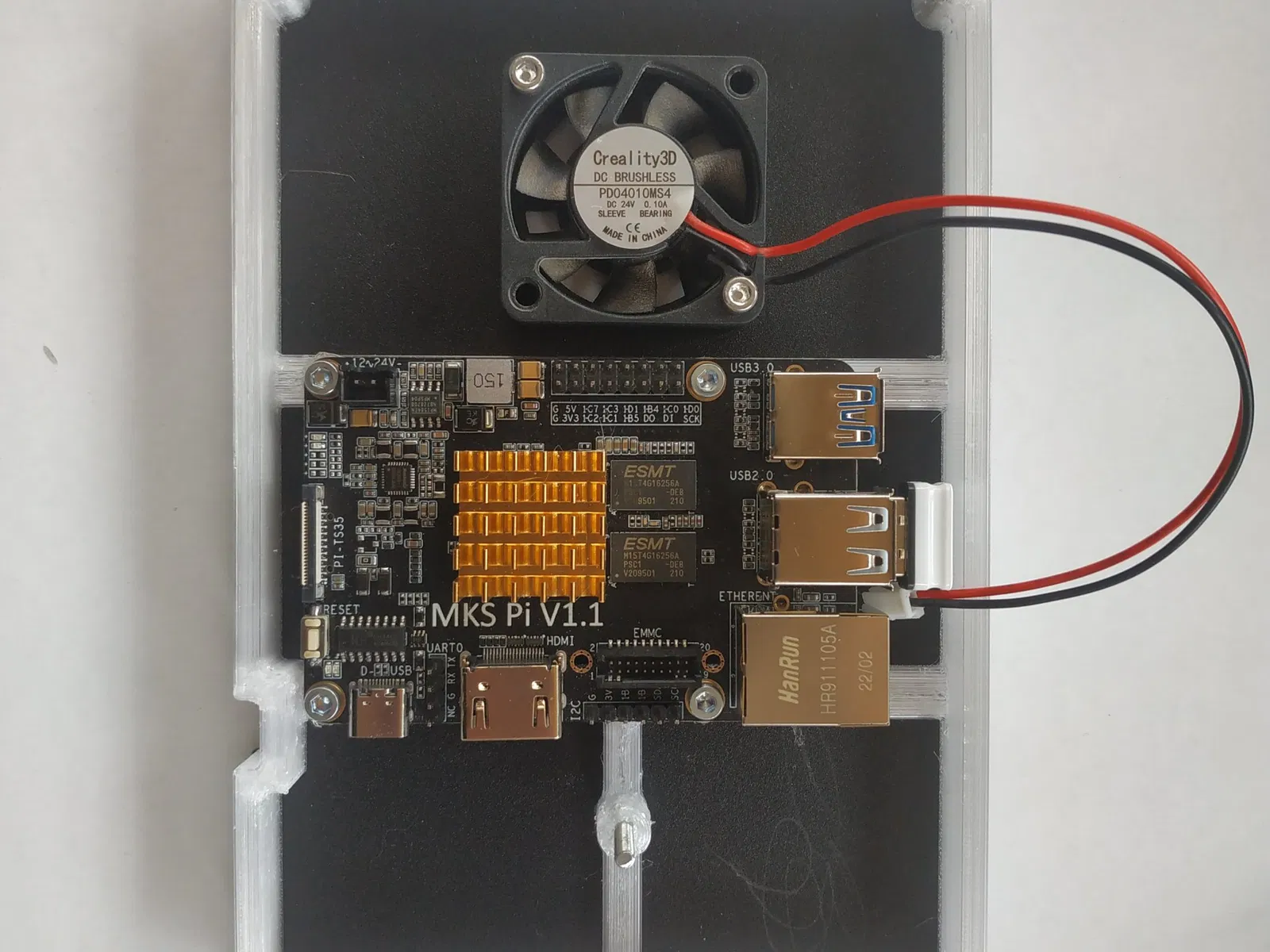
- Sử dụng một mỏ hàn, chèn 4 đầu ren vào các lỗ thích hợp.
- Gắn MKS Pi vào giá đỡ bằng 4 bu lông M3 x 6 mm.
- (Tùy chọn) Khi bạn đang làm việc này, bạn cũng có thể muốn thay thế những con vít kém chất lượng, dễ bị tuôn ra giữ bảng mạch chính của máy in. Ba hoặc bốn bu lông M3 x 4 mm sẽ làm được việc.
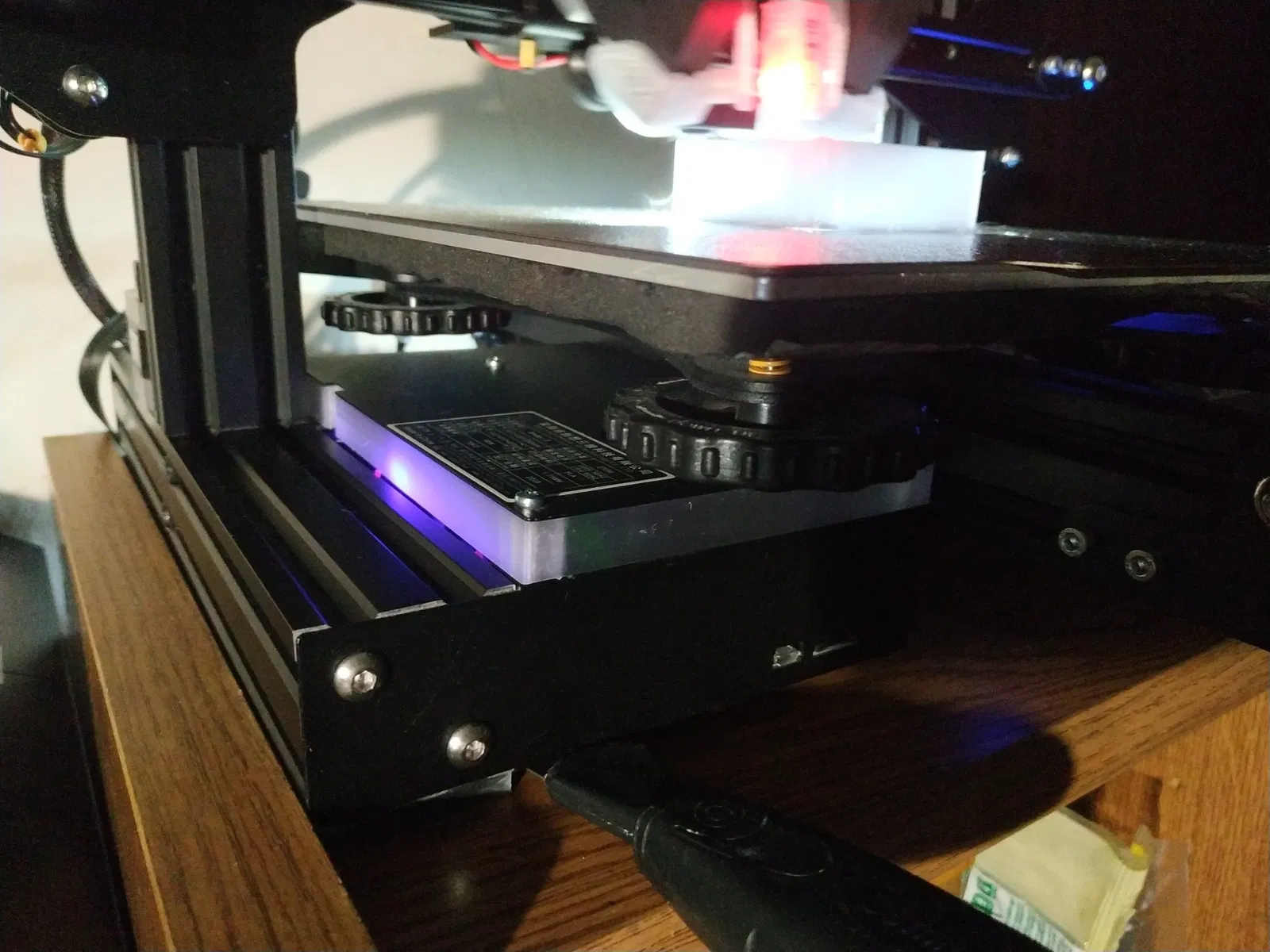
- Bảo đảm cụm nắp trên vào máy in bằng ba bu lông M3 x 20 mm, theo cách giống như trước. Kiểm tra rằng không có sự cản trở giữa trục Y và vỏ máy trước khi bật máy in bằng cách di chuyển trục Y qua toàn bộ phạm vi chuyển động của nó bằng tay. Tôi cũng khuyên bạn nên dọn dẹp dây điện của bạn trước khi tiếp tục với việc sửa đổi này cho máy in của bạn và kiểm tra kỹ rằng không có sự cản trở giữa bảng mạch chính của bạn và MCU mà bạn đang lắp đặt. Không nên có bất kỳ phần kim loại lộ ra nào (ví dụ: vỏ của các cổng Ethernet hoặc USB) chạm vào BẤT KỲ phần nào của bảng mạch chính của máy in của bạn. Thiết kế để lại nhiều khoảng trống giữa hai bảng, nhưng không bao giờ thừa khi xem xét mọi thứ một lần nữa. Điều này chưa được thử nghiệm với bất kỳ sự kết hợp bảng mạch chính/MCU nào khác - trong bất kỳ trường hợp nào, hãy áp dụng một chút lý trí và sử dụng theo rủi ro của riêng bạn. Nhiệt độ: - Nhiệt độ trung bình của MCU là ~25-30 °C
- Nhiệt độ trung bình của Rockchip (CPU Pi) là ~50-60 °C (khi quạt điện tử hoạt động, nó thường duy trì gần 50 °C)
- Cả hai đều ở nhiệt độ môi trường khoảng 25 °C Nếu có bất cứ điều gì nổ trên máy in của tôi, tôi sẽ chắc chắn thêm một bản cập nhật :) Giới hạn: - Thiết kế này để lại rất ít khoảng trống giữa vỏ điện tử và bánh xe POM trục Y (khoảng một hoặc hai milimét). Điều này được thực hiện để tối đa hóa khoảng cách giữa MKS Pi và bo mạch chính của máy in, nhằm giảm thiểu khả năng xảy ra ngắn mạch giữa hai bo mạch. Do đó, bất kỳ nắp hoặc vỏ quạt nào bạn đã thêm cho quạt điện tử sẽ cần phải được gỡ bỏ.
- Bạn sẽ hoàn toàn không có quyền truy cập vào bất kỳ cổng nào của Pi khi mọi thứ đã được lắp ráp và ở đúng vị trí. Tuy nhiên, một dongle USB Wi-Fi nhỏ (như trong trường hợp của tôi) sẽ dễ dàng vừa vặn ngay cả khi mọi thứ đã hoàn tất. .file .step cũng được bao gồm cho bất kỳ ai quan tâm.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!