Giá đỡ từ tính BLTouch cho đầu đùn Micro Swiss NG

Một giá treo từ tính phát hành nhanh cho bltouch được thiết kế cho máy đùn Micro Thụy Sĩ.

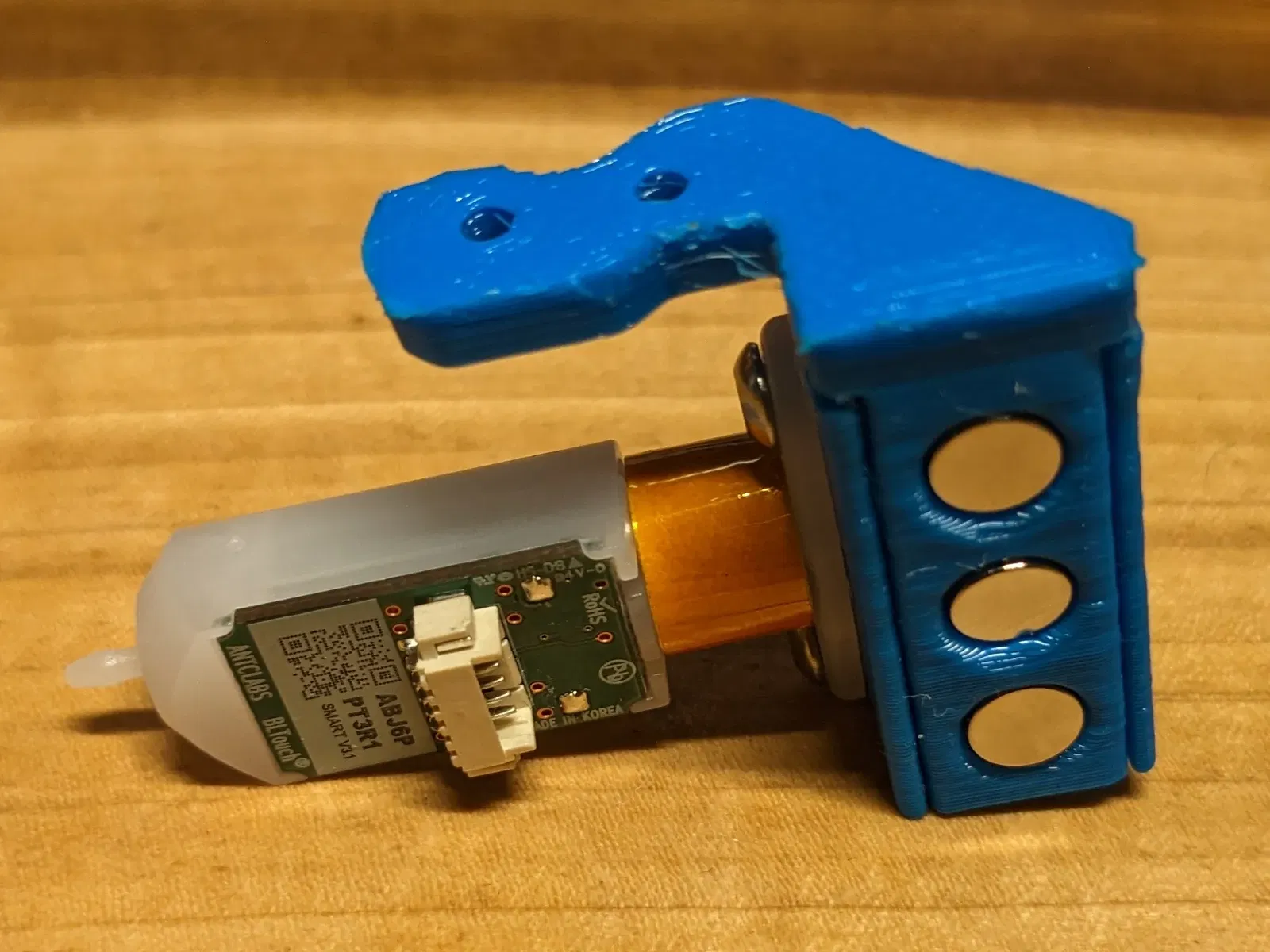


Mô tả
[Lưu ý cập nhật đã bị xóa để rõ ràng trong việc dịch] Đối với phiên bản Ender 3 V2 tiêu chuẩn, hãy vào đây: https://www.f3d.vn/3d-model/2997-gia-do-tu-tinh-bltouch-cho-ender-3-v2 Bạn đã bao giờ để BLtouch của mình “vô tình” va vào một mô hình hoặc phần nào đó của máy in chưa? Tôi cũng vậy…. nhưng trong trường hợp tôi làm và làm gãy một chân cảm biến BLtouch khác hoặc toàn bộ cảm biến, tôi đã tạo ra bộ chuyển đổi từ tính này cho Micro Swiss NG Extruder để giữ BLTouch. Khoảng trống cho chân cảm biến BLTouch là rất ít và tôi đã phải sáng tạo với một số hình học. Một bài kiểm tra M48 cho thấy độ lệch chuẩn là 0.00387 giữa các chân cảm biến, điều này là hợp lý. Tổng trọng lượng filament là 5g nhưng tôi không biết tổng trọng lượng của nam châm. Nó chắc chắn nặng hơn giá đỡ nguyên bản từ Thingiverse nhưng cũng có độ linh hoạt ít hơn khi sử dụng PETG. Mô hình nguyên bản in bằng PLA cứng hơn nhưng dễ bị gãy khi có những trò nghịch ngợm xảy ra. Giá đỡ nên hoạt động trên bất kỳ máy in nào có khoảng cách lỗ tương tự trên tấm gantry. ### Lắp ráp 1. Khi lắp đặt, hãy đảm bảo rằng tất cả các vết bẩn, mối nối và sợi chỉ đều được loại bỏ khỏi các bề mặt tiếp xúc giữa các bộ phận in. Tùy thuộc vào chiều cao lớp của bạn, bạn có thể cần phải mài các khe nam châm để vừa khít. 2. Khi bạn chắc chắn rằng các nam châm sẽ vừa, hãy sắp xếp chúng theo hướng N-S-N cho một phần và S-N-S cho phần còn lại. Đây là cách gần nhất với một mảng Halbach mà bạn có thể đạt được với 3 nam châm. Sử dụng keo siêu dính nếu các nam châm không giữ được vị trí. 3. Gắn tấm bộ chuyển đổi gantry vào tấm gantry. Lỗ vít trên cùng được khoét sâu và yêu cầu rằng bu lông m3 hoàn toàn nằm trong khoét sâu đó để đảm bảo căn chỉnh nam châm đúng cách. 4. Gắn chân cảm biến BLTouch vào phần Giá đỡ Chân cảm biến. 5. Gắn cáp BLTouch. 6. Ghép hai phần lại với nhau và đảm bảo không có khoảng trống nào nhìn thấy được bằng cách áp dụng một chút áp lực. 7. Điều chỉnh độ lệch Z của Chân cảm biến. ### Phần cứng cần thiết - Sáu nam châm tròn neodymium 6x2 ### Cài đặt in - Vật liệu: PETG (PLA có thể hoạt động?)
- Vòi phun: 0.6mm
- Đổ đầy: 100%
- Không hỗ trợ ### Lời phàn nàn Đôi khi tôi tự hỏi liệu máy in của mình có được giữ lại bằng kẹo cao su và dây thừng không. Tôi chắc chắn rằng tôi có thể truy nguyên nó về một điều gì đó tôi đã làm hoặc không làm nhưng những trải nghiệm hỗn loạn giữa các bản in giống hệt nhau thật phiền phức. Tôi đã trải qua tất cả: - Động cơ quá nhiệt? Có.
- Trục Z dừng giữa chừng khi in (có thể do nóng)? Tất nhiên.
- Mô hình rời khỏi bàn và kẹt giữa khung và đầu đùn/cảm biến? Bạn sẽ không mong đợi điều đó, nhưng có.
- Cảm biến được cấu hình sai khiến xe đẩy va chạm vào khung và trục dẫn khi in lớn? Tôi không thể tưởng tượng ra điều này.
- Cảm biến không triển khai khiến đầu đùn cố gắng in vòi vào bàn kính và làm cong trục X? “Tôi có thể làm điều này!” là điều tôi tưởng tượng máy in của mình đang nói.
- Giảm căng cảm biến tại đầu đùn làm hỏng kết nối trung gian và khiến vòi phun giả dạng một giàn khoan? Ôi, bạn chắc chắn rồi. Tuyên bố miễn trừ trách nhiệm: Máy in của tôi không phải là PRUSA nhưng vẫn nằm trong khoảng giá mà tôi mong đợi một tỷ lệ thành công tốt hơn so với thất bại. Tuy nhiên, nó đã thấy một số điều... rất nhiều điều.
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!