2654P VEX V5 Controller Cần Gạt

Cần gạt VEX Robotics V5 Controller 2654P, giúp người lái điều khiển robot tốt hơn bằng cách nhấn các nút trên đỉnh tay cầm thông qua cần gạt, bền và công thái học hơn.









Mô tả
Cái này là cái gì?
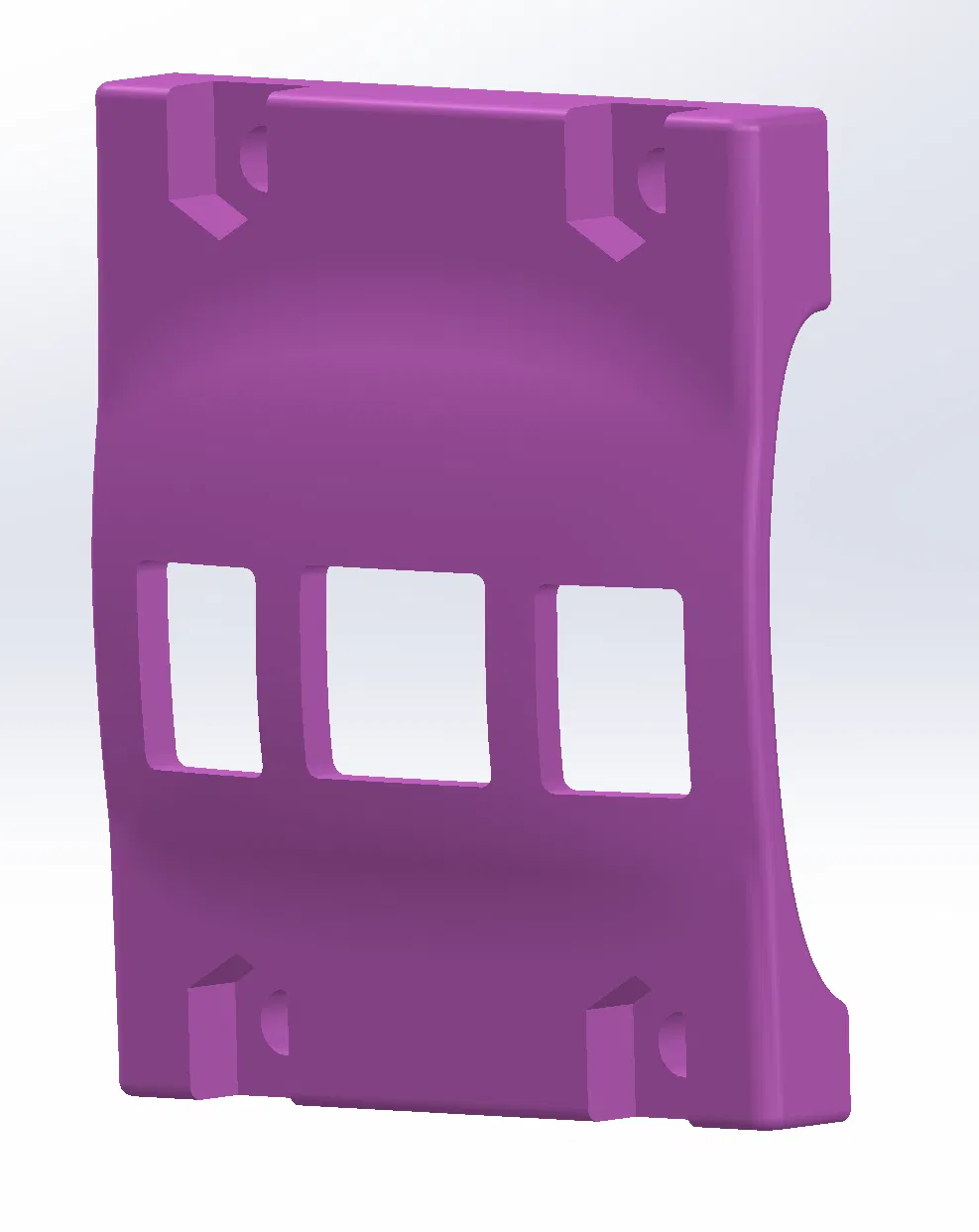
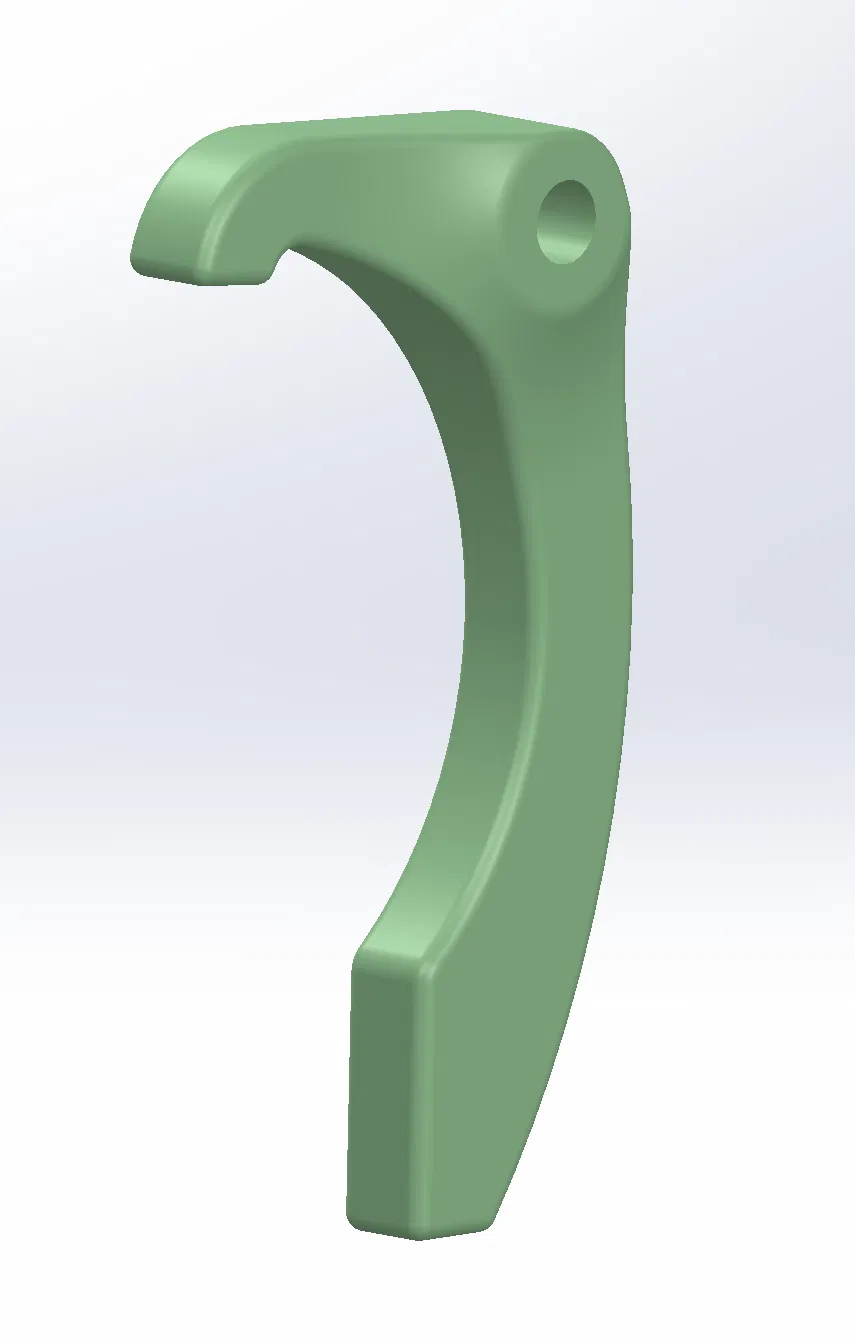
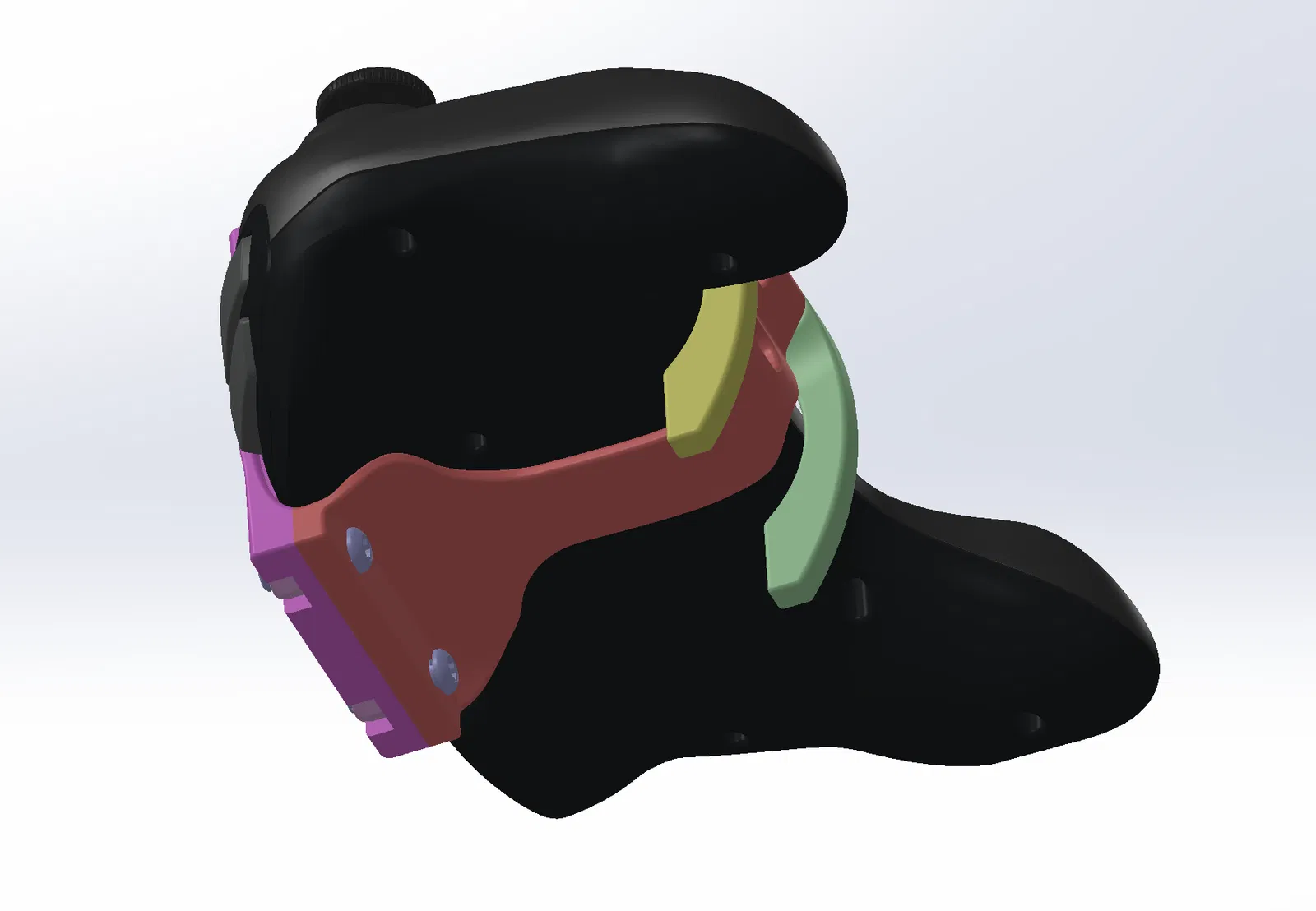
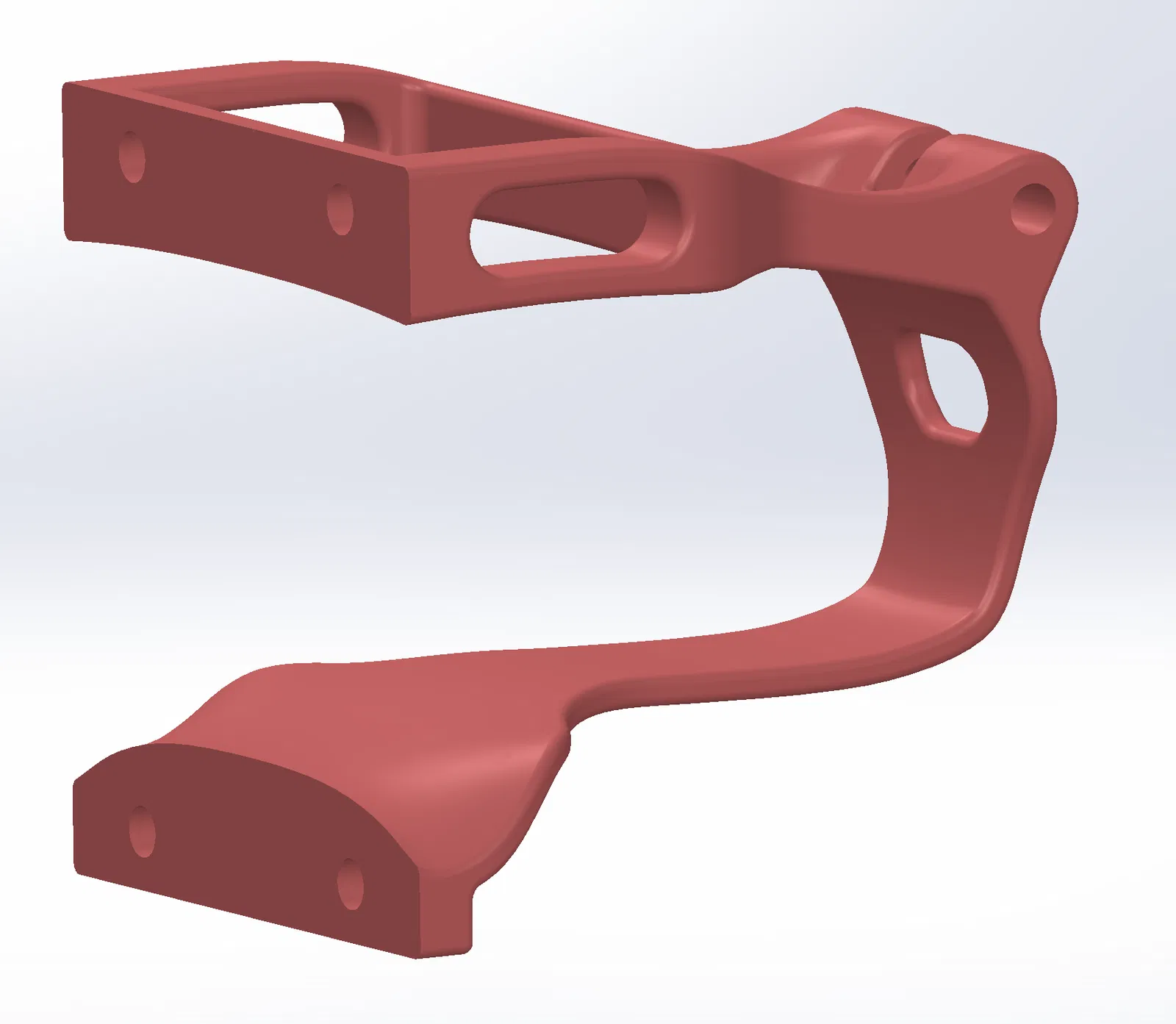
Đây là một bộ phận in 3D dành cho tay cầm VEX V5, cho phép người lái robot điều khiển tốt hơn trong trận đấu bằng cách nhấn các nút trên đỉnh tay cầm thông qua các cần gạt bền bỉ vươn tới dưới tay cầm. Điều này cho phép người lái duy trì khả năng kiểm soát cần điều khiển trong khi nhấn các nút này. Thiết kế này, mặc dù có ít hơn hai cò so với các mẫu công khai khác, nhưng có độ bền được cải thiện nhiều cũng như công thái học tốt hơn.
Sắp có hướng dẫn in và nhiều hơn nữa
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — NoDerivativesCC-BY-NC-ND

File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!