Giá Đỡ Spool và Cảm Biến Sợi Nhựa

Sau khi độ máy Aquila X2 sang direct drive, người dùng muốn giữ lại chức năng cảm biến sợi nhựa mà không làm mất không gian in. Thiết kế này xoay spool 90 độ + 45 độ về sau, sử dụng vòng bi 608 cho giá đỡ cảm biến. Gắn vào khung bằng t-nut/bu lông, có thể in nghiêng để tăng độ cứng cáp.


Mô tả
Sau khi độ con Aquila X2 của mình sang direct drive, mình muốn giữ lại chức năng của cảm biến sợi nhựa. Mình cũng muốn đảm bảo không bị mất đi không gian in. Cái này cũng xài được cho Ender 3 v2 hoặc mấy con clone của nó.
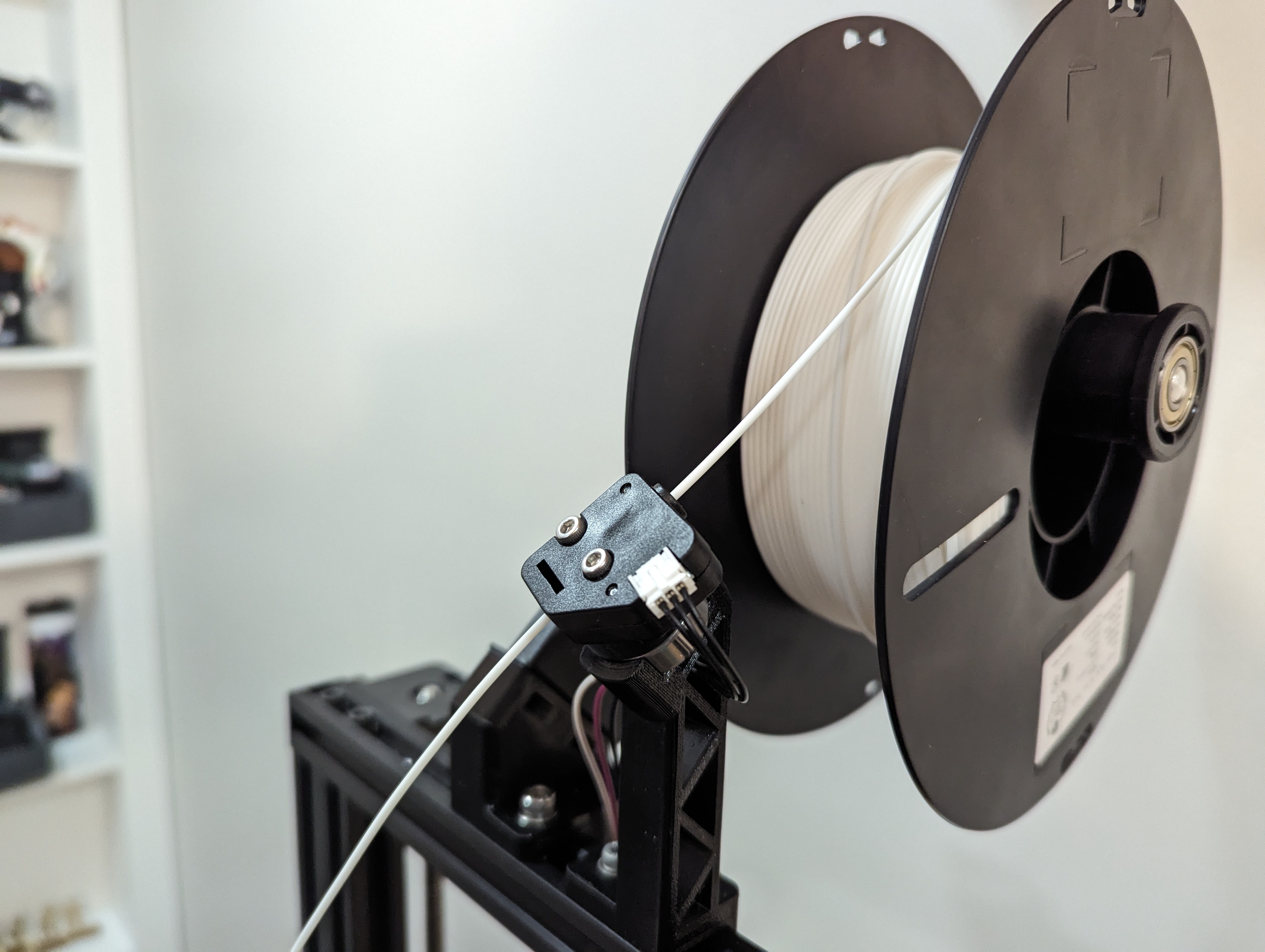
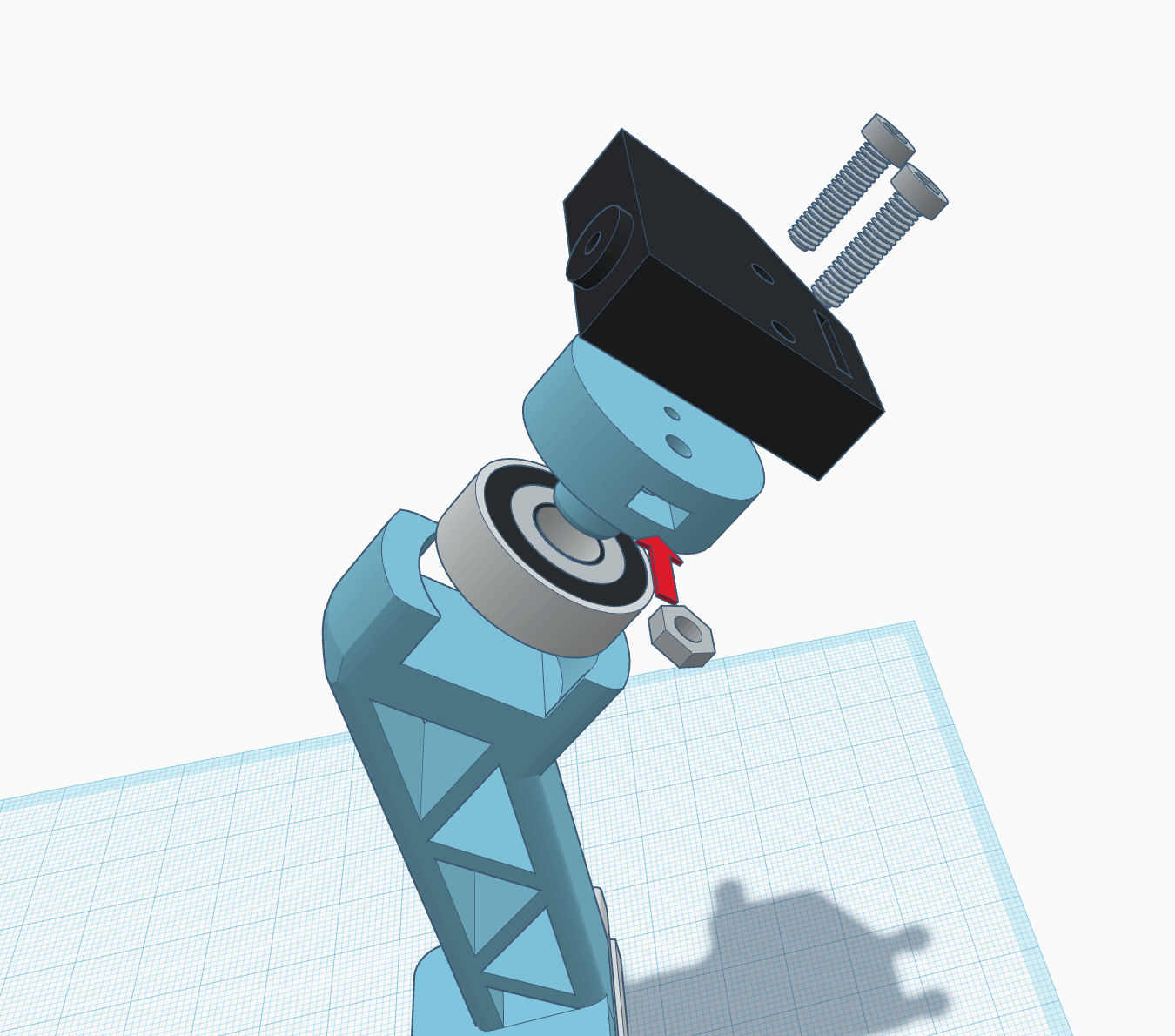
Cái giá đỡ spool xoay spool 90 độ + 45 độ ra phía sau. Cái giá đỡ cảm biến sợi nhựa xài vòng bi 608 để cho phép di chuyển cần thiết cho các bản in cao hơn.
Các giá đỡ được gắn vào khung bằng một con t-nut/bu lông duy nhất (Mình nghĩ mình dùng mấy con bu lông y chang cái tay cầm). Bạn cần thả con t-nut vào rãnh của khung trước, sau đó gắn giá đỡ và canh chỉnh lỗ để bắt ốc vào. Mình thiết kế vậy để không cần tháo gì khác ra khỏi thanh ray trên cùng để lắp mấy cái này, và cũng cho phép in mấy cái giá đỡ này nằm nghiêng để đường line lớp in nó cứng cáp hơn.
Cái spool zin thì gắn vào giá đỡ bằng mấy con bu lông cũ; mình thay t-nut bằng mấy con ốc M5 thường có sẵn.
Cảm biến sợi nhựa thì gắn vào đế bằng mấy con bu lông M3; cái đế này ép chặt vào vòng bi 608, cái vòng bi này ép chặt vào tay của giá đỡ.
Mình in hết bằng PETG và không có vấn đề gì với giải pháp gắn bằng một con bu lông cho spool; nó đủ cứng cáp.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA