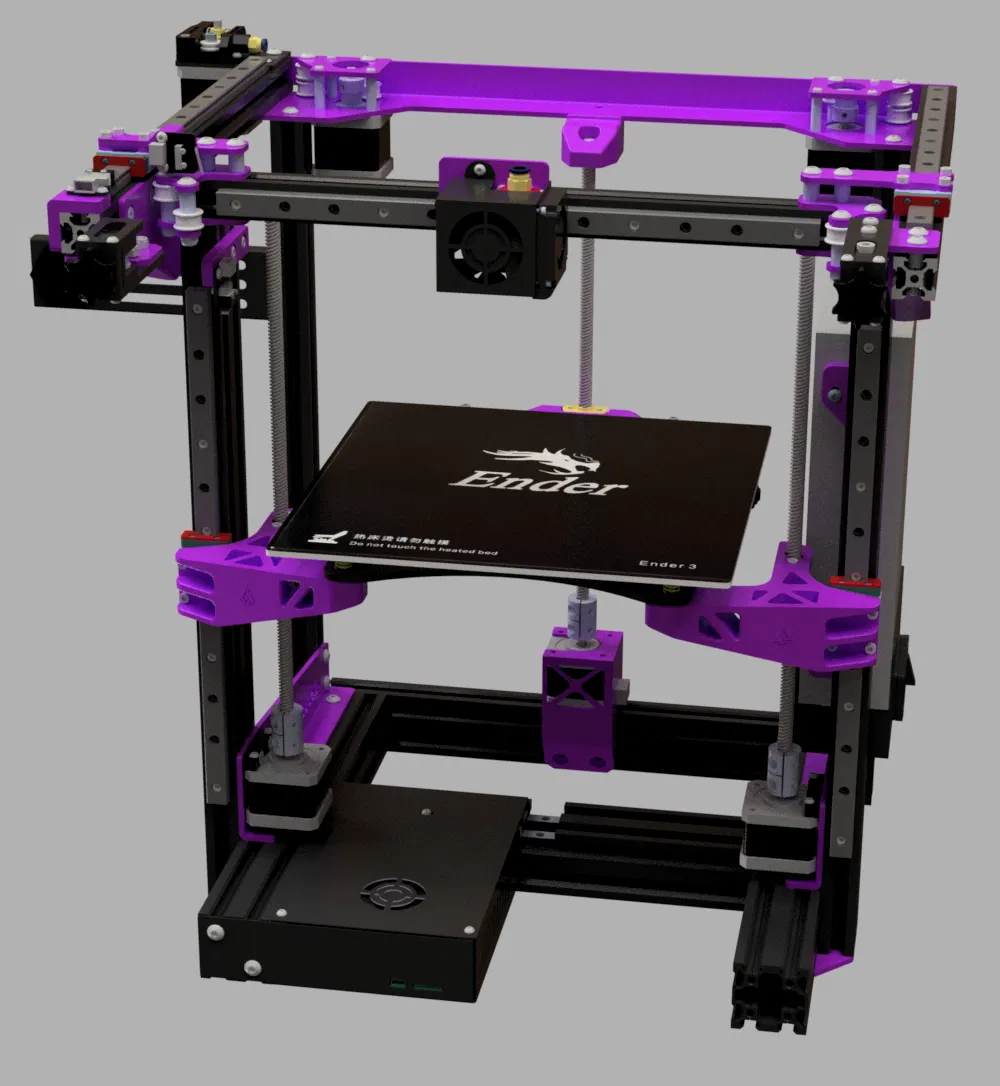
Nâng cấp EnderXY - Triple-Z: Cải thiện độ cứng và căn chỉnh

Khám phá bản mod "EnderXY - Triple-Z" với các bracket trục Z tùy chọn. Giải quyết vấn đề nghiêng giường in, cải thiện độ cứng và quy trình căn chỉnh. Hướng dẫn chi tiết phần cứng và cài đặt Klipper. Hỗ trợ cộng đồng Reddit và tác giả qua Ko-fi.








Mô tả
Tham gia cộng đồng EnderXY trên Reddit:
https://www.reddit.com/r/EnderXY/
Nâng cấp này sẽ yêu cầu một bo mạch chủ có 3 driver độc lập cho trục Z (tôi dùng bo Octopus).
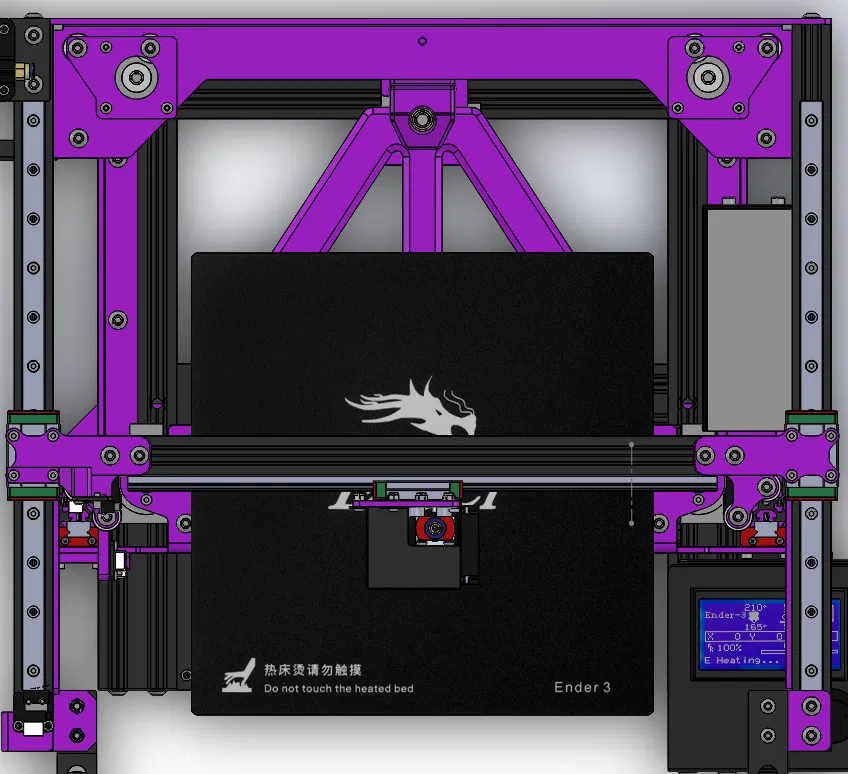
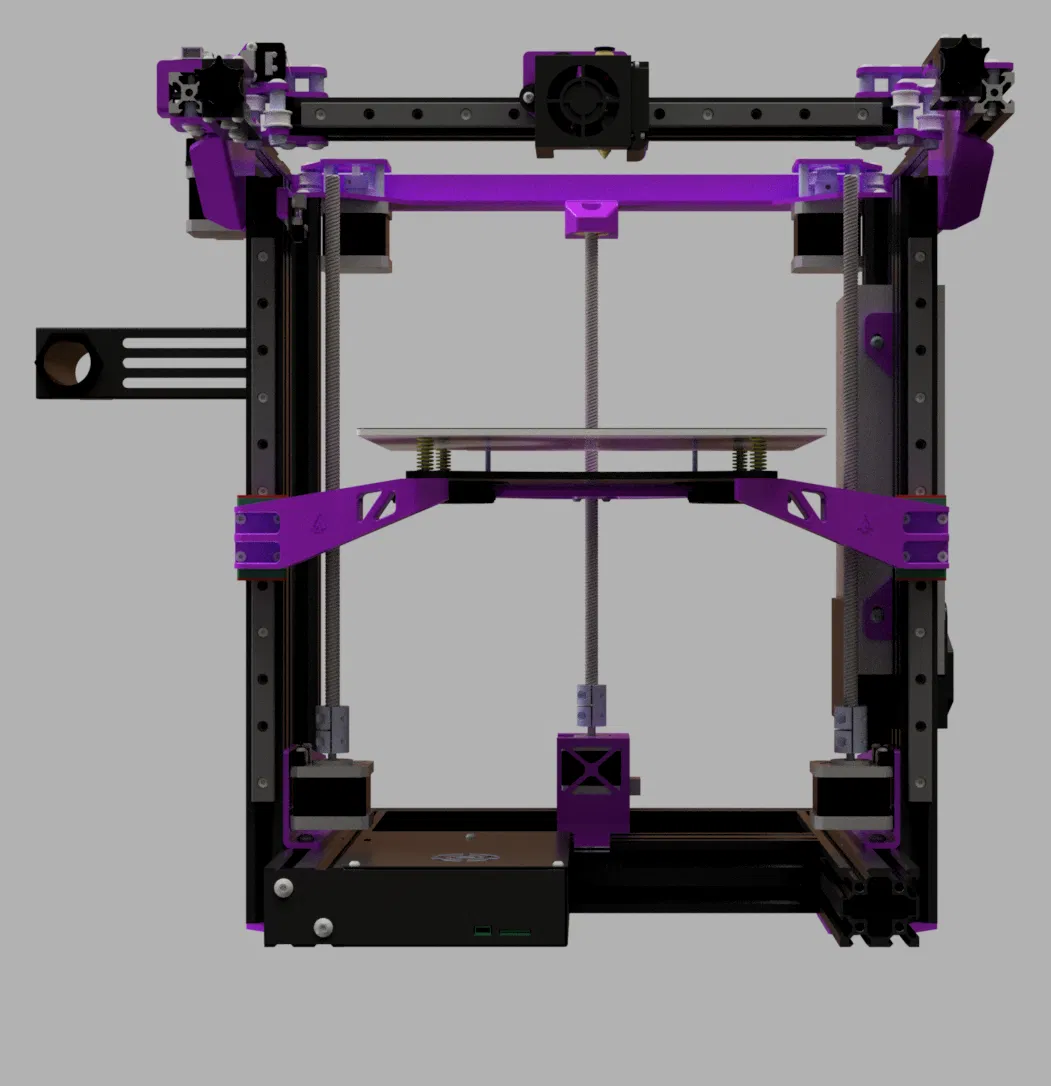
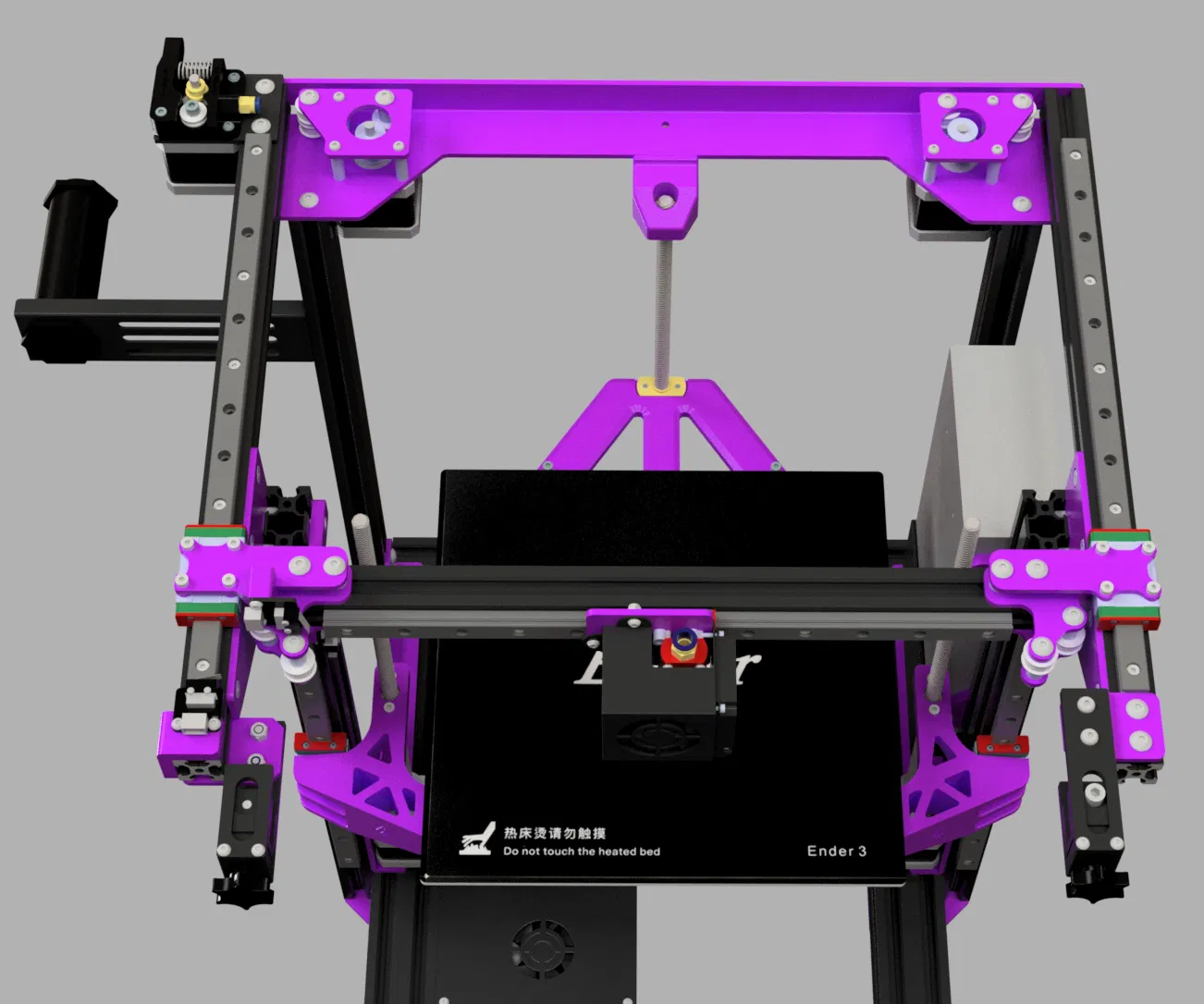
Khắc phục vấn đề chính của EnderXY là phần giường in bị nghiêng nhẹ về phía trước và sau khi trục Z di chuyển lên xuống, do các thanh dẫn hướng (linear rails) bị lệch so với trục vít me (leadscrews).
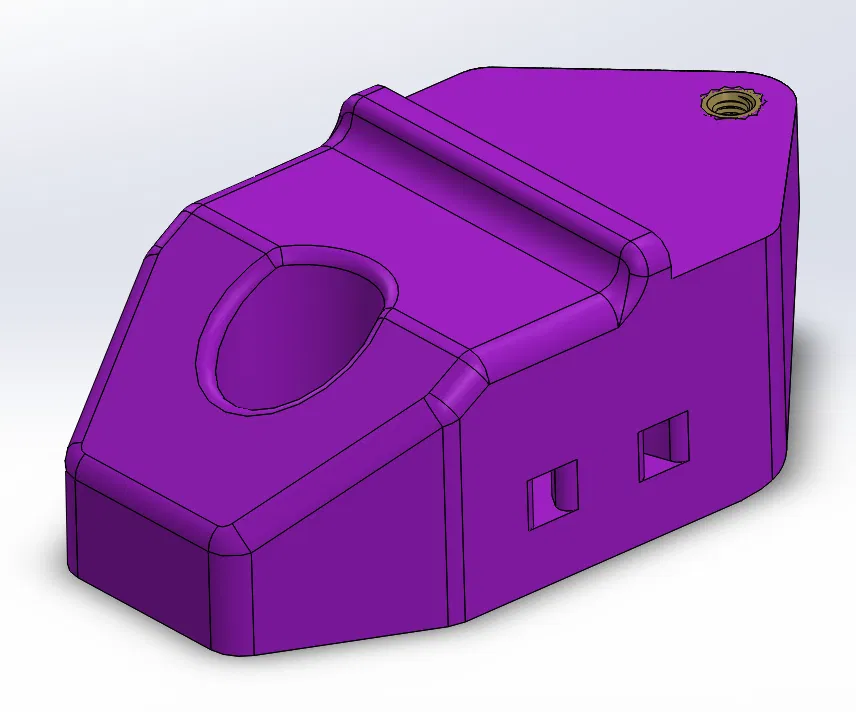
Tôi đã định hướng các bộ phận theo cách chúng cần được in. Bộ phận duy nhất cần support là bộ phận "Triple-Z Upper Brace".
Cập nhật:
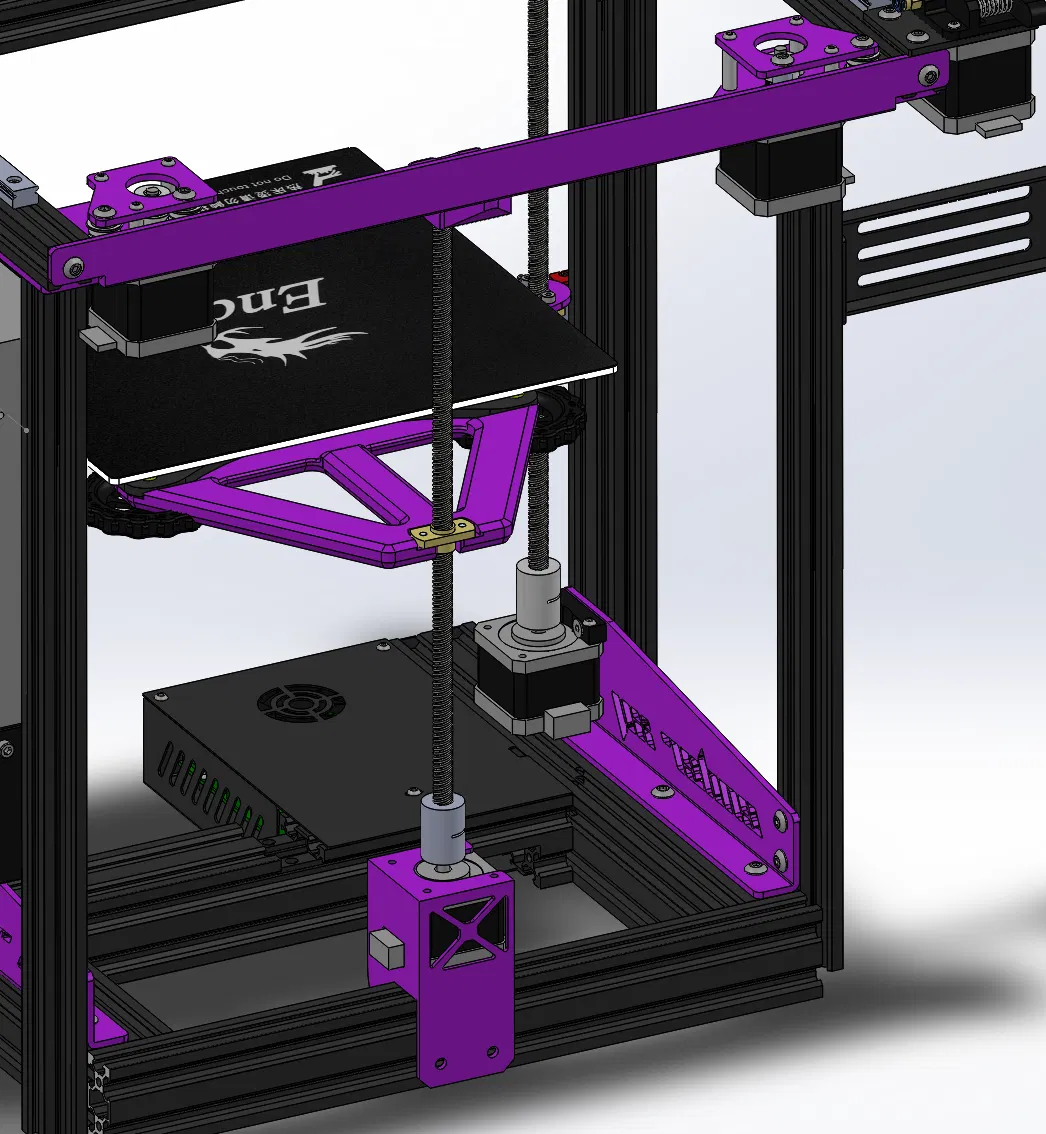
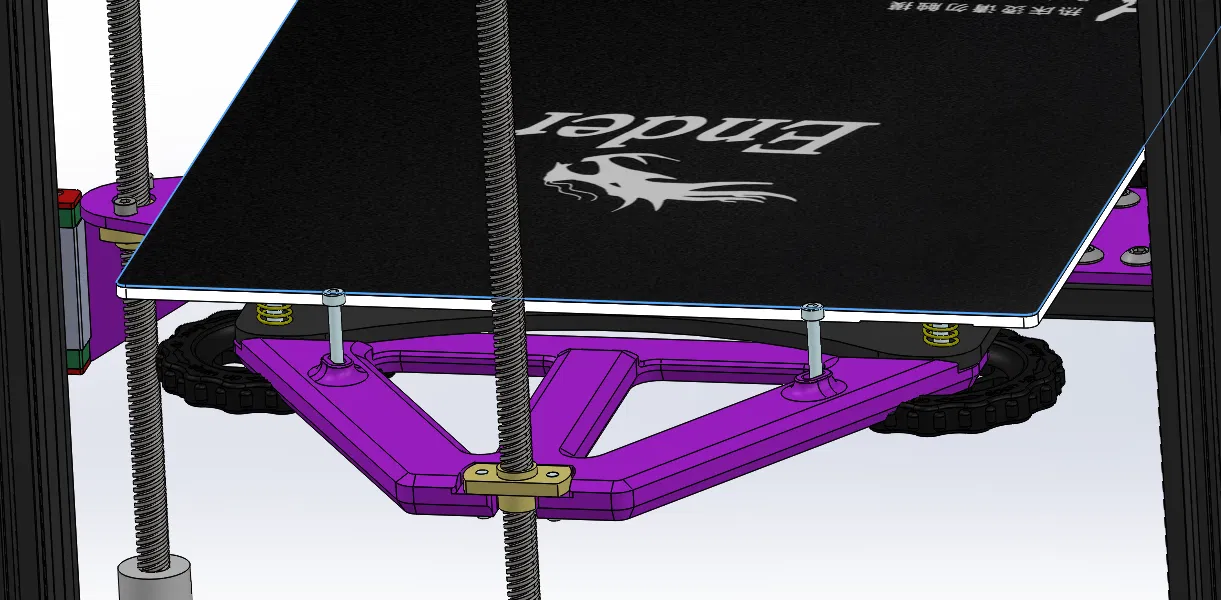
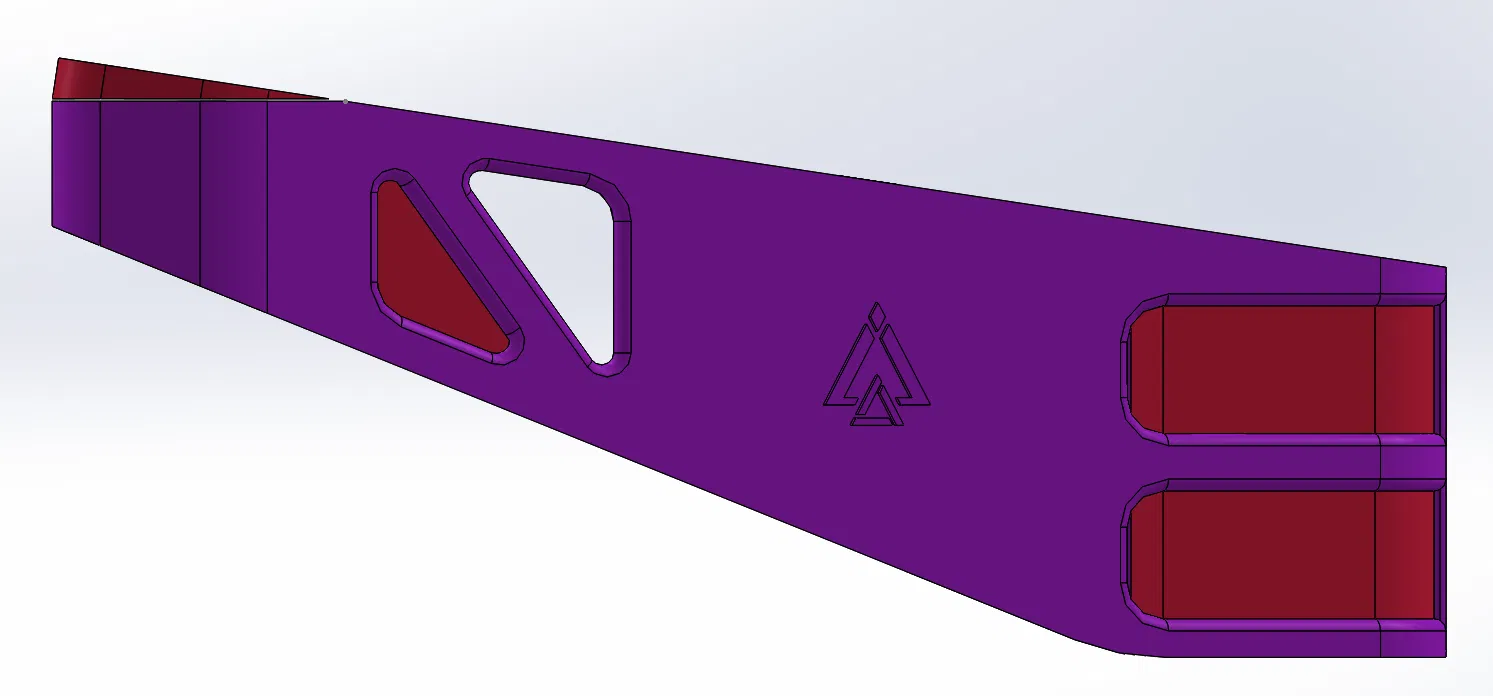
Đã thêm các cánh tay tùy chọn để thay thế các cánh tay gốc nhằm cải thiện độ cứng của giường in hơn nữa. Chúng có tích hợp support (Kiểm tra hình cuối và cẩn thận loại bỏ các phần màu đỏ sau khi in). Không hoạt động với vị trí LCD gốc. Đối với các bracket trục Z tùy chọn, bạn sẽ loại bỏ các bracket trục Z gốc, thanh nhôm 1010 và các núm chỉnh giường ở phía trước.
Video giới thiệu trước (Pre-release video):
Các điểm chính:
- Cải thiện đáng kể độ cứng của giường in.
- Cải thiện quy trình căn chỉnh.
- Giảm độ võng trên trục Z.
- Sử dụng các núm chỉnh giường và vít gốc để gắn tấm đế in vào tấm đế gốc.
- 2 vị trí dây rút để giữ bó dây cáp.
- (Tùy chọn đế in - Optional Carriage) 2 vị trí bu lông điều chỉnh để dễ dàng căn chỉnh tấm thép ở phía sau.
- (Tùy chọn bracket trục Z - Optional Z Brackets) Cải thiện độ cứng hơn nữa.
Phần cứng cần thiết:
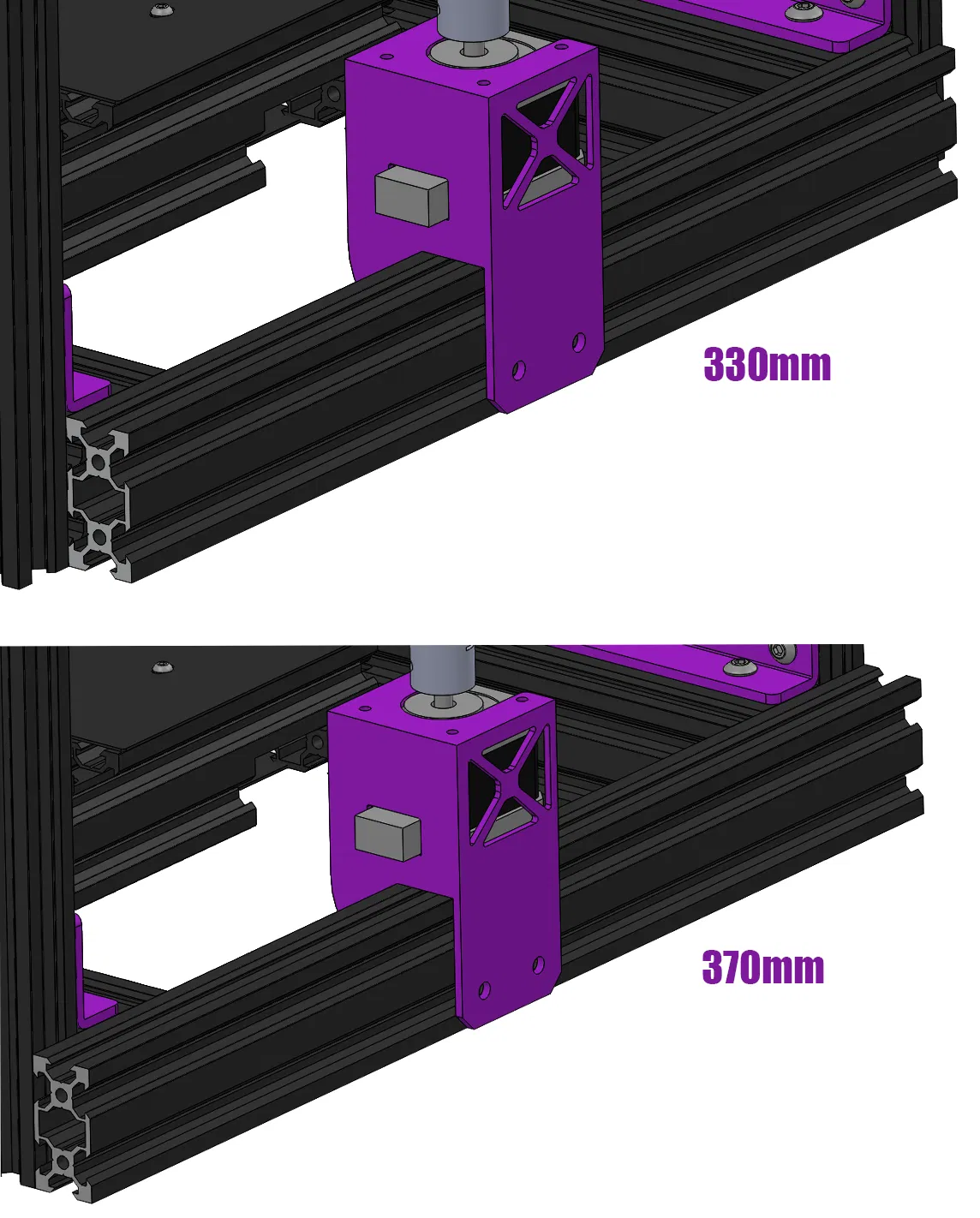
- 1x thanh nhôm 2040 dài 330mm hoặc 370mm (Hình #4)
- 1x động cơ bước 42-34
- 1x trục vít me dài 300mm
- 1x đai ốc trục vít me T8
- 1x khớp nối trục 5mm sang 8mm
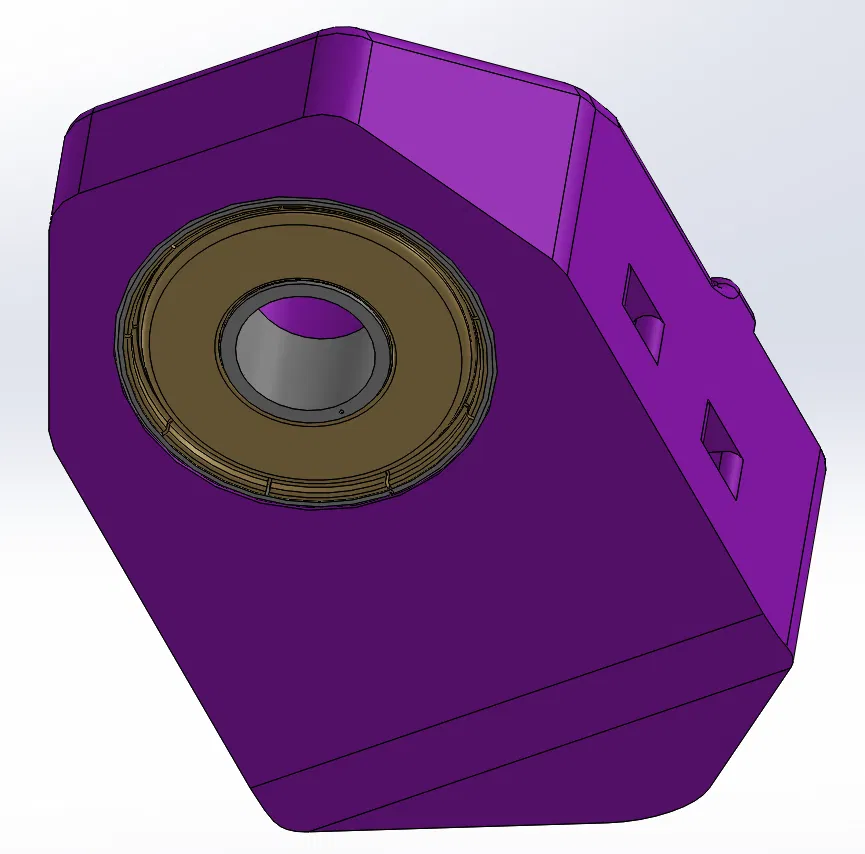
- 1x vòng bi 608Z (Hình #7)
- 4x vít M3 10mm (tấm đế in, thanh gia cố trên)
- 4x vít M3 6mm (Động cơ)
- 4x vít M5 6mm (Giá đỡ động cơ in)
- 1x ren cấy M3 x 4mm x 5mm (thanh gia cố trên in (Hình #6))
- 4x đai ốc T hoặc đai ốc lò xo M5 (Giá đỡ động cơ in)
- 1x cáp động cơ bước
- (Tùy chọn đế in - Optional Carriage) Cần 2 đai ốc M3 vuông.
- (Tùy chọn bracket trục Z - Optional Z Brackets) Cần 2x đai ốc M5.
Cài đặt Klipper:
[z_tilt]
z_positions:
# Trái
-23, 118.4
# Phải
251, 118.4
# Sau
117.5, 302
points:
# Trước Trái
29, 50
# Trước Phải
210, 50
# Sau
123.5, 225_ Các giá trị này sẽ cần điều chỉnh một chút tùy thuộc vào offset của đầu dò của bạn. Video ở trên cho thấy nó dò ở vị trí của các thanh trục Z, nhưng cài đặt ở trên là những gì tôi sử dụng để dò phía trước.
Nếu bạn muốn ủng hộ công việc của tôi, bạn có thể tại đây https://ko-fi.com/supavitax
Giấy phép

File mô hình







Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!