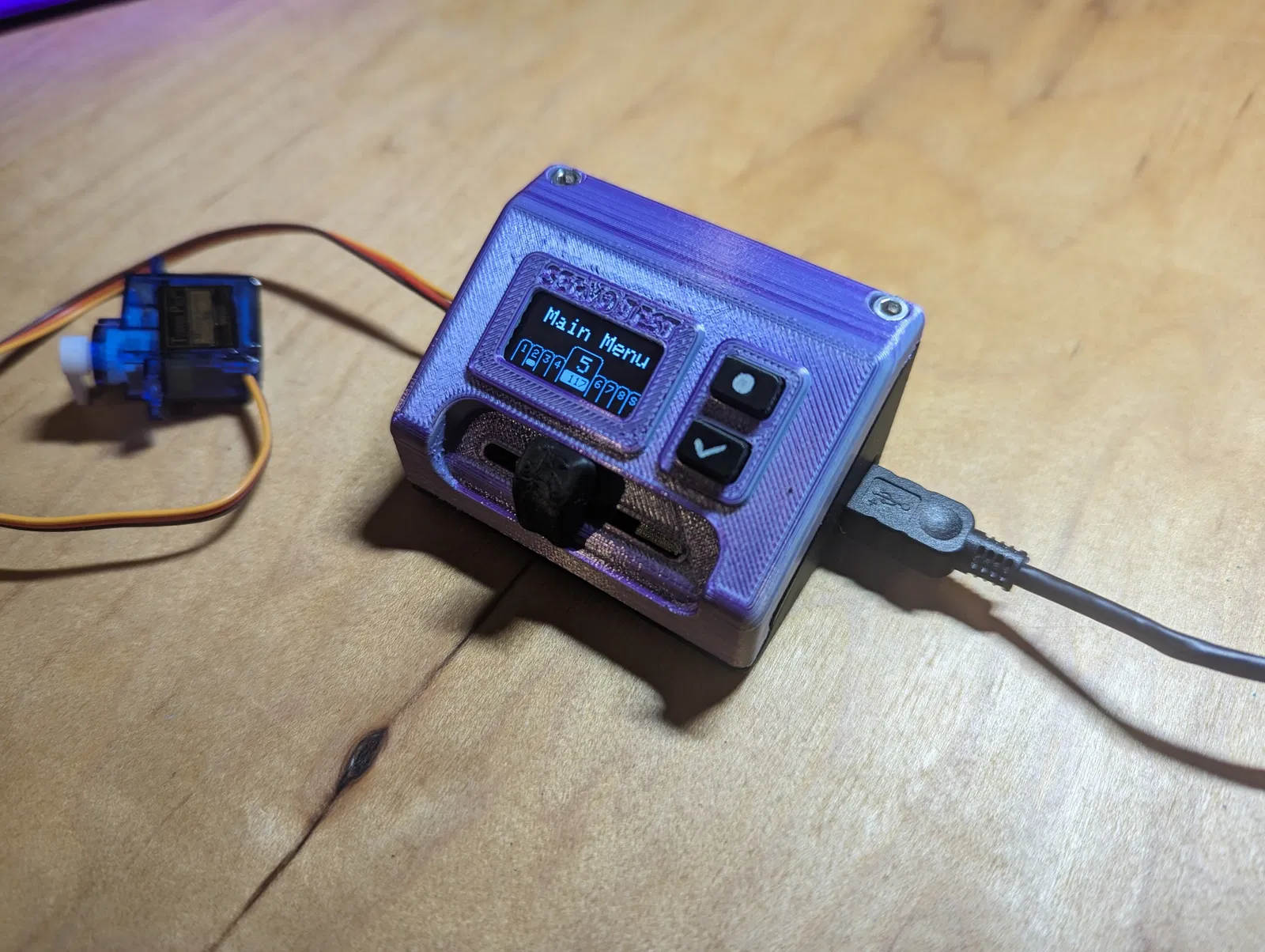
Bộ Kiểm Tra Servo 8 Kênh

Bộ kiểm tra servo nâng cao với màn hình OLED, thanh trượt, nút bấm và 8 cổng ra. Có tùy chọn cấp nguồn VIN hoặc USB. Có thể tùy chỉnh chế độ bật/tắt servo, lưu giá trị và trạng thái, với tính năng an toàn khi chuyển đổi servo.
438
Lượt Xem
10
Lượt Thích
37
Lượt Tải
Cập Nhật Dec 14, 2025





Mô tả
Tôi cần một bộ kiểm tra servo nên đã tự chế tạo nó với những linh kiện có sẵn. Có thể sẽ hơi khó để tự làm vì tôi cũng không nhớ rõ mình lấy biến trở (potentiometer) ở đâu nữa.
Linh kiện cần thiết
Bộ phận điện
- Arduino Nano clone (sử dụng cài đặt “old bootloader”)
- Chân cắm Header cho kết nối servo
- Phích cắm XT60 Male
- Module màn hình OLED 0.96in 128x64
- Nút bấm không khóa (2 cái, có tay đòn)
- Biến trở dạng thanh trượt (slider)
- Bảng mạch PCB trắng 4cm x 6cm
- Các điện trở khác nhau cho cầu chia điện áp và nút bấm kéo xuống
- Dây và giắc cắm JST (tùy chọn)
Bộ phận không điện
- Nhựa in 3D. Dùng hai màu sẽ đẹp hơn
- Vít đầu chìm M3x8 (2 cái)
- Vít đầu chìm M2x5 (4 cái)
- Vít định vị M3x5 (1 cái)
- Keo nến
- Sticker máy in nhãn
Hướng dẫn lắp ráp
Tôi đánh giá đây là dự án có độ khó “trung bình”. Bạn cần có chút kiến thức về điện tử.
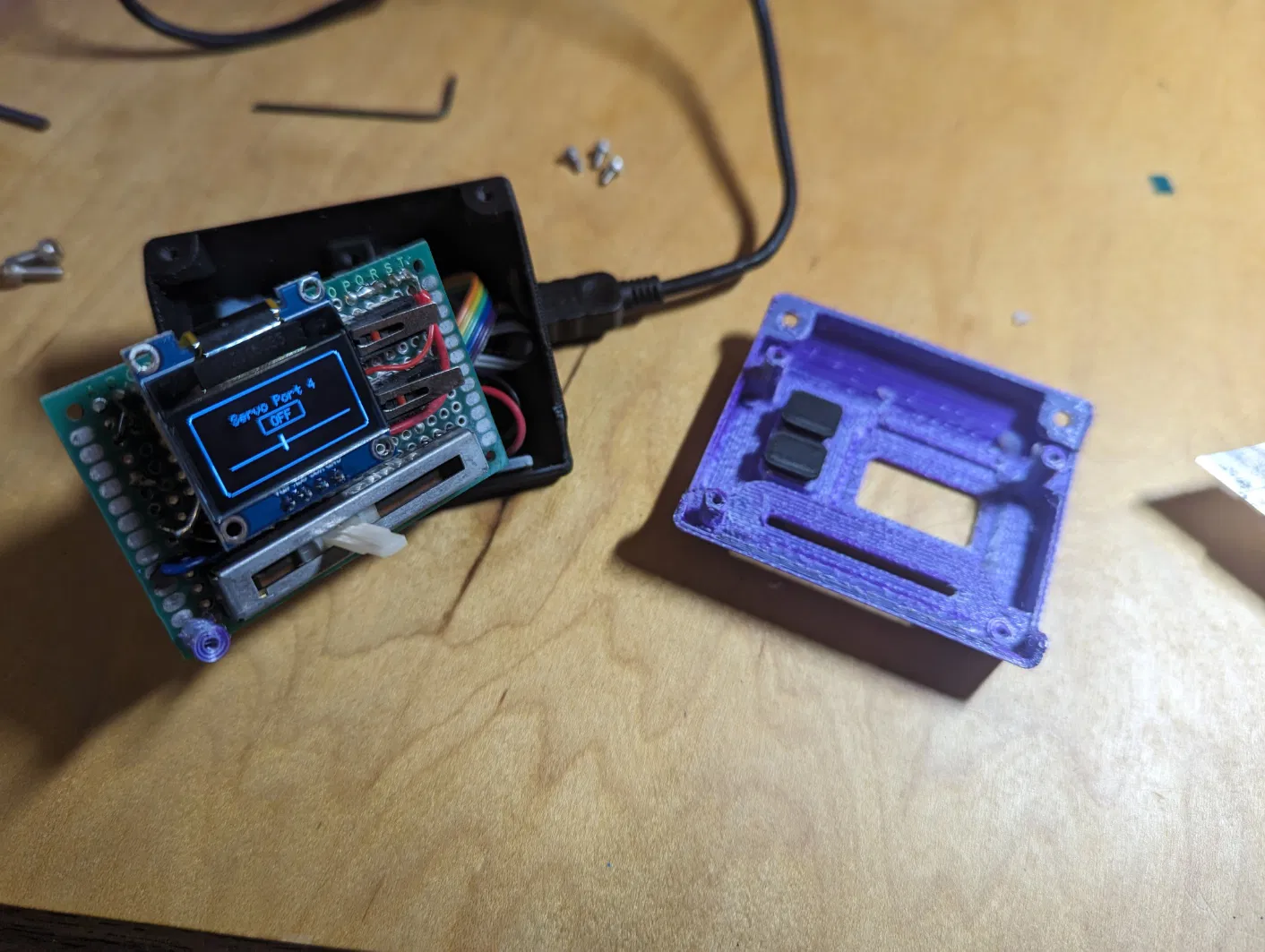
- In 3D các bộ phận (vỏ trên, vỏ dưới, nút bấm (2), núm vặn thanh trượt). Sẽ cần hỗ trợ, và việc gỡ bỏ chúng sẽ hơi phiền phức.
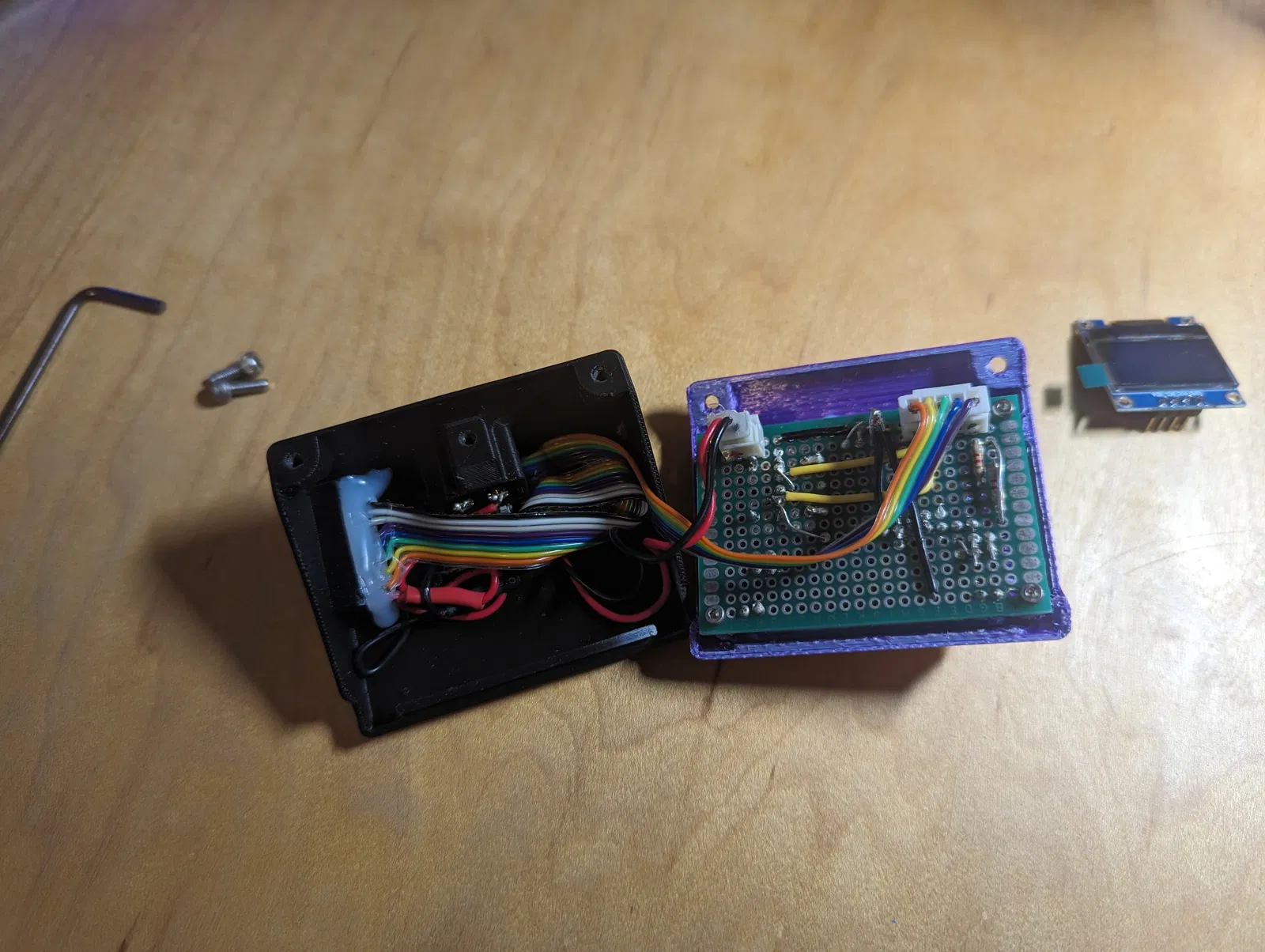
- Lắp ráp bảng mạch PCB điện tử
- Hàn các nút bấm, chân cắm Header cho màn hình và biến trở.
- Hàn các giắc cắm JST cái (Tôi dùng loại 5 chân cho IO kỹ thuật số và loại 2 chân cho nguồn)
- Kết nối tất cả lại. Đảm bảo sử dụng điện trở kéo xuống/kéo lên cho nút bấm và tạo cầu chia điện áp cho biến trở nếu cần.
- Tạo dây cáp và nối dây với Arduino để kiểm tra.
- Vặn bảng mạch PCB điện tử vào tấm vỏ trên bằng vít M2. Cẩn thận, dễ vỡ!
- Nạp phần mềm, bật nguồn và tinh chỉnh căn chỉnh cửa sổ hiển thị. Cố định bằng keo nến.
- Gắn các chân cắm Header vào nửa vỏ dưới và phích cắm XT60. Cố định bằng keo nến / vít định vị.
- Sử dụng dây, nối tất cả các chân V+ và ground trên Header servo, nối dây với cực dương và âm của XT60, và kết nối với chân vin/ground của Arduino Nano.
- Nối tất cả các chân tín hiệu servo với các chân D2 - D9 của Arduino.
- Cố định chân cắm Header bằng keo nến và lắp Arduino (vừa khít).
- Lắp ráp vỏ. Cố định bằng vít M3.
- Hoàn thành!
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...

Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!