Đồng Hồ Lật V2 - Đồng Hồ Split-Flap Chạy Bằng Arduino

Khám phá Đồng Hồ Lật V2, một thiết kế đồng hồ split-flap chạy bằng Arduino với các cải tiến về độ tin cậy, bao gồm điểm dừng cơ học, cài đặt thời gian tự động và hỗ trợ DST. Hướng dẫn chi tiết về lắp ráp, điện tử và in ấn.




Mô tả
Để có các tệp và cập nhật mới nhất, vui lòng truy cập trang GitHub: https://github.com/alexyu132/flipclock
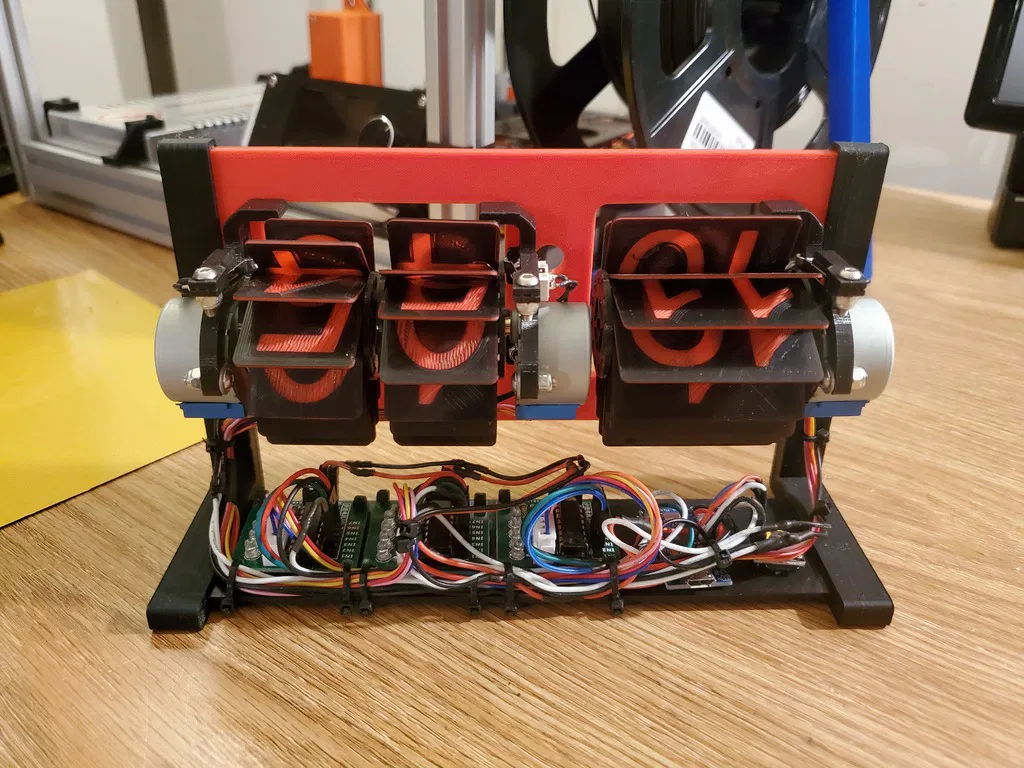
Cuối cùng cũng hoàn thành thiết kế đồng hồ lật của mình. So với phiên bản gốc, phiên bản này giờ đây có các điểm dừng cơ học trên màn hình của nó để tăng độ tin cậy. Mã trình điều khiển hiện đã được cung cấp, cũng như BOM đầy đủ và hướng dẫn lắp ráp.
Flip Clock v2
Đồng hồ chạy bằng Arduino sử dụng màn hình cơ khí split-flap.
Tính năng
- Tự động cài đặt thời gian khi tải sketch
- Mô-đun RTC theo dõi thời gian ngay cả khi không được cấp nguồn
- Hỗ trợ US DST - đồng hồ tự động bỏ qua/lùi 1 giờ khi cần
- Chạy bằng nguồn USB của Arduino - không cần nguồn điện riêng
- Tự động hiệu chuẩn một lần mỗi vòng quay bằng cách sử dụng các điểm dừng cơ học
- Các động cơ bước tắt khi không di chuyển để tiết kiệm năng lượng
Các bộ phận không in
| Bộ phận | Số lượng | Ghi chú |
|---|---|---|
| Ốc lục giác chìm M3x10mm | 17 | |
| Đai ốc khóa M3 | 17 | |
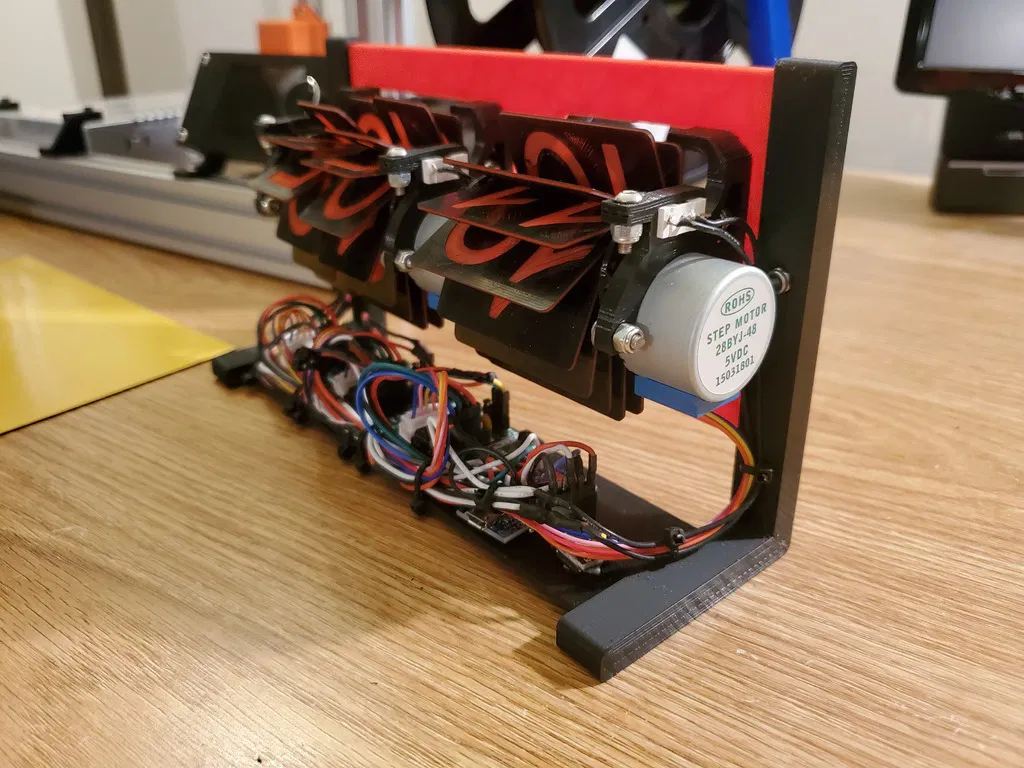
| Động cơ bước 28byj-48 | 3 | |
| Trình điều khiển động cơ bước ULN2003 | 3 | |
| Pro Micro hoặc Arduino nhỏ tương tự (5V) | 1 | |
| Mô-đun RTC DS3231 | 1 | |
| Công tắc hành trình PCB | 3 | Cần cắt các công tắc và hàn dây vào các chân C và NO |
| Dây rút | Tùy số lượng | |
| Dây (22AWG hoặc tương tự) | Tùy số lượng | |
| Băng dính hai mặt | Tùy số lượng |
In
Các bộ phận được thiết kế để in mà không cần hỗ trợ. Chiều cao lớp khuyến nghị là 0.2mm hoặc thấp hơn.
Các số trên các lá lật được thụt vào 0.2mm, vì vậy các bộ phận này được khuyến nghị in ở chiều cao 0.2mm. Nếu bạn không muốn tô màu các số thủ công, bạn có thể tạm dừng quá trình in sau lớp đầu tiên và chuyển sang màu sợi khác. Đảm bảo tạm dừng trước lớp cuối cùng để chuyển lại màu ban đầu.
Lắp ráp
Màn hình
- Sử dụng 2 ốc M3x10mm và đai ốc khóa để gắn động cơ vào giá đỡ động cơ.
- Lắp nắp rôto vào trục động cơ, với núm nhô ra hướng về phía thân động cơ.
- Nhấn rôto vào trục động cơ. Rôto sẽ khớp với nắp rôto.
- Gắn các lá lật vào rôto. Nếu gặp khó khăn khi gắn các lá lật, bạn có thể lùi rôto ra khỏi trục một chút để có thêm khoảng trống. Nửa trên của màn hình nên là mặt úp xuống khay in, và điều ngược lại cũng đúng với nửa dưới. Nếu lắp đúng, các số sẽ tăng khi màn hình quay. (Lưu ý: màn hình hàng chục (màn hình ở giữa) có 2 bộ số giống hệt nhau. Trong 1 vòng quay của màn hình, nó sẽ đếm từ 0 đến 5 hai lần.)
- Nếu chưa làm, hãy cắt bỏ công tắc khỏi mỗi bảng mạch công tắc hành trình và hàn dây vào các chân C và NO.
- Luồn công tắc hành trình qua khe hình chữ nhật phía trên động cơ. Công tắc có thể di chuyển tới lui để kiểm soát khoảng cách với nắp rôto. Điều chỉnh vị trí công tắc sao cho núm trên nắp rôto kích hoạt công tắc. Khóa công tắc vào vị trí bằng một ốc M3x10mm và đai ốc khóa khác.
Khung
- Gắn mỗi màn hình vào tấm mặt trước bằng 2 ốc và đai ốc khóa.
- Gắn các chân đế vào hai bên của tấm mặt trước và khay điện tử. Sử dụng ốc và đai ốc khóa để cố định mọi thứ (tổng cộng 4 cái).
Điện tử
- Để dễ quản lý cáp, tấm mặt trước và các chân đế có các điểm gắn dây rút. Các cáp màn hình giờ nên được định tuyến qua chân đế bên trái và các màn hình khác nên được định tuyến về phía chân đế bên phải. Do chiều dài của cáp động cơ bước, việc gắn các trình điều khiển động cơ bước theo thứ tự ngược với các màn hình sẽ gọn gàng hơn, tức là trình điều khiển bên phải nhất gắn vào màn hình bên trái nhất.
- Các trình điều khiển động cơ bước được gắn bằng dây rút. Lúc đầu, chỉ gắn dây rút gần phía trước đồng hồ, vì dây rút phía sau cũng sẽ được sử dụng để quản lý cáp.
- Kết nối mô-đun RTC với các chân I2C trên Arduino. Trên Pro Micro, kết nối SDA với chân 2 và SCL với chân 3. Ground và VCC trên RTC nên được nối với các chân tương ứng trên Arduino.
- Kết nối các chân 5V và ground của trình điều khiển động cơ bước với các chân VCC và ground tương ứng trên Arduino.
- Kết nối các động cơ bước với Arduino. Trên Pro Micro, các chân được đề xuất là 4, 5, 6, 7 cho màn hình giờ; 8, 9, 10, 16 cho màn hình hàng chục; và 14, 15, A0, A1 cho màn hình hàng đơn vị.
- Kết nối một bên của mỗi công tắc hành trình với ground trên Arduino, và bên kia với một chân IO. Trên Pro Micro, nên kết nối công tắc hành trình giờ với A3, công tắc hành trình hàng chục với A2 và công tắc hành trình hàng đơn vị với TX0 (digital 1). Nếu bạn muốn giữ các chân TX/RX trống cho việc khác, các công tắc hành trình cho màn hình hàng chục và hàng đơn vị có thể được kết nối với nhau và chia sẻ chân A2.
- Sau khi mọi thứ được kết nối, sử dụng băng dính hai mặt để dán Arduino và mô-đun RTC vào khay điện tử.
- Sử dụng dây rút qua các lỗ trình điều khiển động cơ bước phía sau để cố định cáp.
Hiệu chuẩn và vận hành
Mã trình điều khiển được cung cấp trong thư mục 'flipclock'. Các tham số có thể cấu hình, cũng như mô tả của chúng, ở đầu tệp. Chỉnh sửa chúng nếu cần. Khi tải sketch, hãy chuẩn bị rút phích cắm đồng hồ nhanh chóng nếu bất kỳ màn hình nào quay ngược, vì điều này có thể làm hỏng các công tắc hành trình. Nếu một màn hình quay ngược, hãy đảo ngược thứ tự các chân cho màn hình đó trong tệp sketch.
Thể loại: Điện tử
Giấy phép
File mô hình














Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!