ESP32 CAM Rover với cánh tay robot

Rover leo cầu thang được sửa đổi, tích hợp cánh tay robot và điều khiển qua ESP32 CAM. Sử dụng bánh xe TPE in tùy chỉnh cho độ bám cao và tiết kiệm vật liệu. Bao gồm các bộ phận in STL cho cánh tay và móng vuốt kẹp, cùng danh sách các bộ phận điện tử cần thiết.


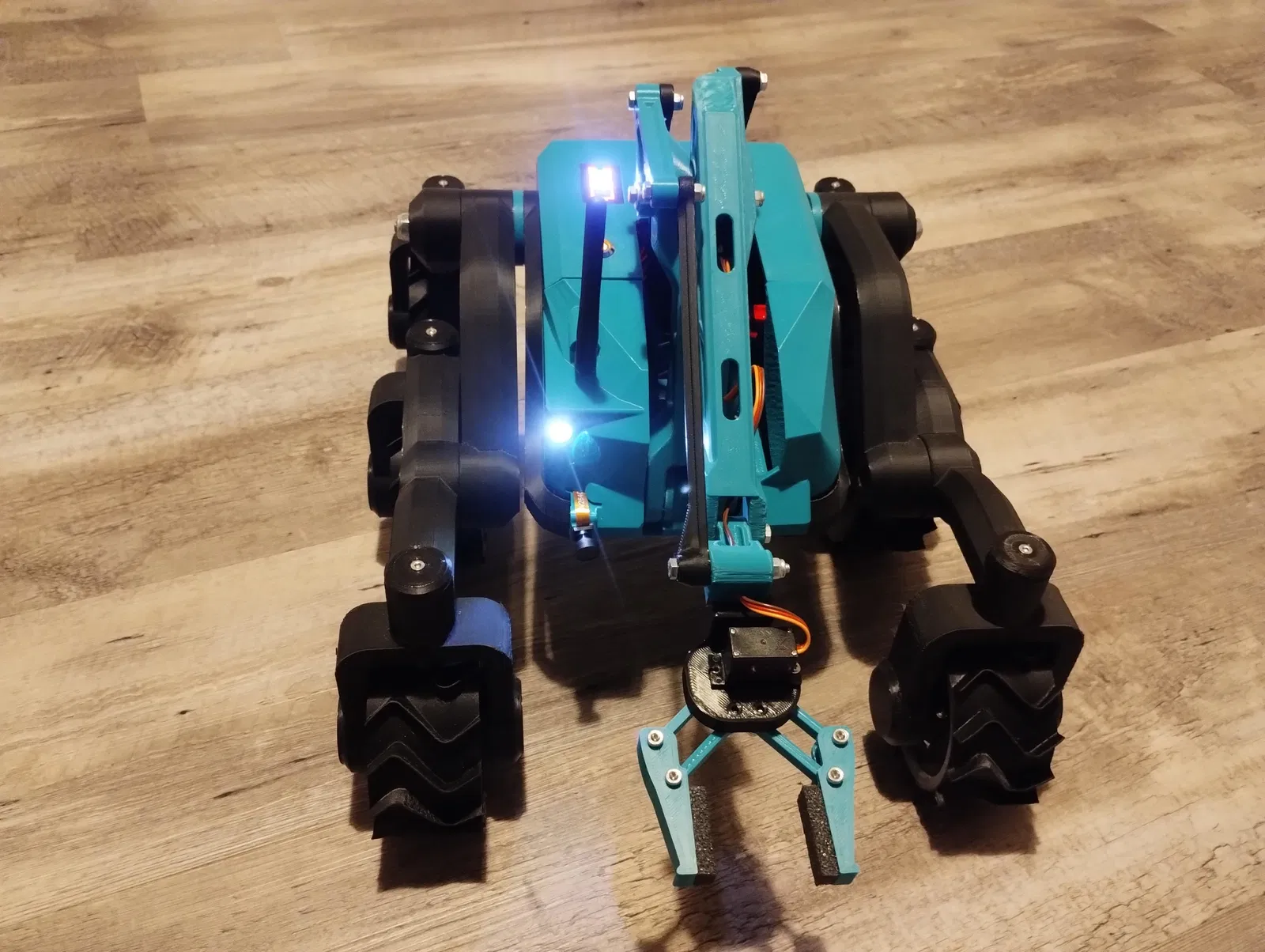








Mô tả
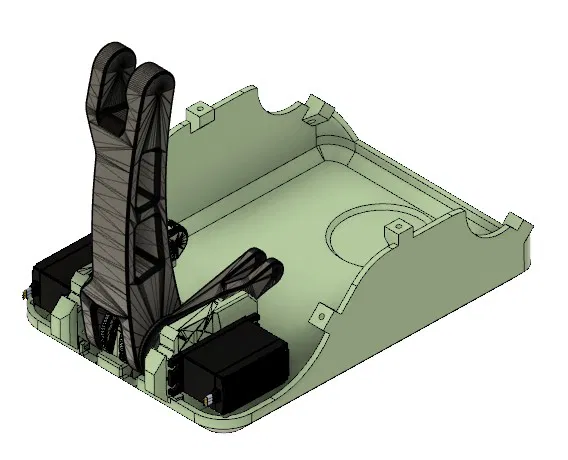
Đã sửa đổi rover leo cầu thang để mang theo cánh tay robot. Giá đỡ nằm ở khung dưới, các servo được xoay 90°, các nắp và khung có các khe hở cho cánh tay robot. ESP32 CAM với ăng-ten ngoài được gắn trong nắp trên, qua đó mọi thứ được điều khiển và camera FPV. Các cánh tay được sửa đổi cho các phiên bản không có servo. Các bánh xe được cố định như vậy và việc quay là bằng cách trượt. Các đĩa được sửa đổi để tránh nhu cầu về giá đỡ động cơ. Lốp TPE in tùy chỉnh cho độ bám tối đa, tiêu thụ vật liệu thấp và không cần giá đỡ.
Tất cả các tệp STL còn thiếu không thay đổi trong các mô hình gốc.
Thiết kế tùy chỉnh cho móng vuốt kẹp với servo SG90
Các bộ phận STL cho cánh tay robot có thể được tìm thấy tại đây: https://www.thingiverse.com/thing:4632254
Các bộ phận điện tôi đã sử dụng:
1x móng vuốt: https://dratek.cz/arduino/122952-servo-mg90s-180-s-kovovymi-prevody.html
2x cánh tay: https://dratek.cz/arduino/1694-servo-motor-s-kovovymi-prevody-mg996r-pro-rc-modely.html
LED: https://dratek.cz/arduino/121799-led-graficky-indikator-kapacity-lithiove-baterie-18650-2s.html
Nguồn: https://dratek.cz/arduino/121707-led-vodotesny-prepinac-12-mm-zlute-podsviceni.html
Ăng-ten: https://pajenicko.cz/index.php?route=product/product&product_id=848
Một số video:
Giấy phép

File mô hình


















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!