Cảm biến dừng filament cho máy in 3D Ender3 Neo

Di chuyển cảm biến Runout trên các máy in loạt NEO từ Gantry X sang đùn nhôm hàng đầu. V2 có 2 khe T.
Mô tả
Vì vậy, tôi đã sử dụng bộ trục vít Sprite Direct Drive SE mới cho dòng Neo.
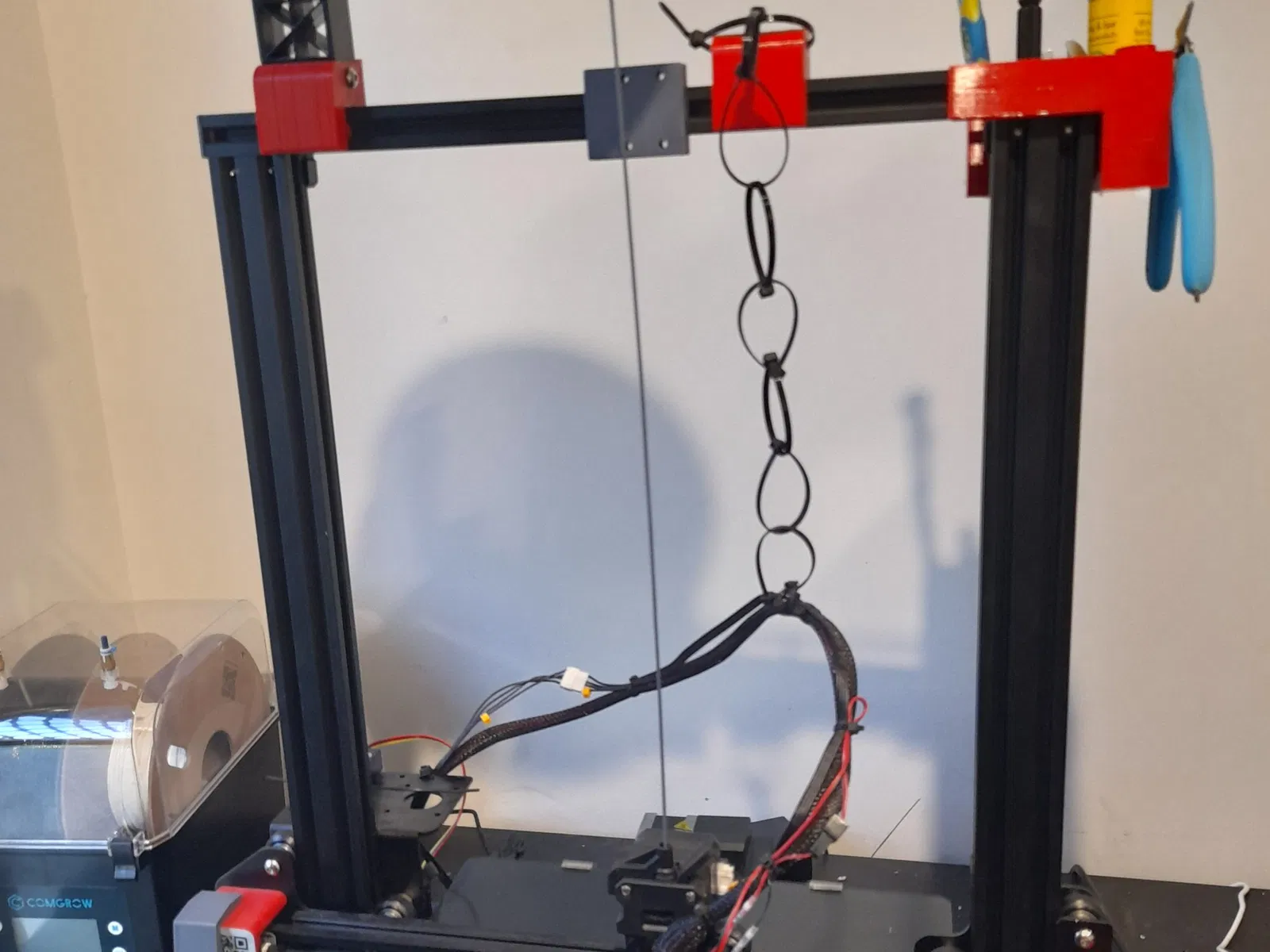
Tôi rất thích nó, nhưng tôi cần di chuyển cảm biến hết filament. Tôi đã sử dụng các khe T cho phần nhôm trên cùng để gắn nó. Chỉ cần trượt vào và đặt nó ở vị trí bạn muốn.
Bạn sẽ phải kéo dài dây cho đầu nối, vì chúng không đủ dài. Tôi đã chọn không gắn cảm biến vào đầu in vì 2 lý do
- Tôi không muốn trọng lượng thêm - tôi đã quan sát thấy sự mờ nhòe của các chi tiết tinh xảo khi tôi chạy một thiết lập trực tiếp nặng hơn 100g và tôi từ chối thêm trọng lượng đó trở lại
- Gắn cảm biến ở vị trí này mang lại lợi ích bổ sung là ngăn chuyển động của đầu in làm lắc cuộn của bạn trong quá trình in
V1 sử dụng một khe T duy nhất và có kiểu dáng thấp hơn, V2 sử dụng hai khe T và cứng cáp hơn nhiều.
Đối với cả hai, bạn sẽ cần phần cứng phù hợp. Tôi chưa gắn của mình, tôi cần đi mua một số vít, nhưng tôi sẽ báo cáo lại khi tôi đã tìm ra độ dài chính xác.
Đối với V2, 2 lỗ vít trên cùng sẽ phải được khoan trước khi vặn vào, để tránh bị nứt. - Tôi chỉnh sửa các mô hình của mình trong eSlicer và nó không xuất ra bất kỳ thể tích âm nào được tạo ra nên bất kỳ lỗ nào tôi tạo ra không được lưu vào STL, vì vậy tôi không thể làm gì ở đây, tôi e rằng.
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!