GOPROBOT V1.0 - Robot Arduino Điều Khiển Wifi Tự Chế

Khám phá GOPROBOT V1.0, một robot Arduino điều khiển từ xa qua Wifi do chính tay làm, tích hợp camera Gopro. Dự án này bắt đầu từ niềm đam mê của hai cha con, sử dụng máy in 3D và các linh kiện phổ biến. Bài viết chia sẻ chi tiết về ý tưởng, các bộ phận, cách lắp ráp và điều khiển, cùng mã nguồn mở.









Mô tả
LỊCH SỬ HÌNH THÀNH
Câu chuyện về chú robot nhỏ Printbot này, mà tụi tui rất đỗi tự hào, bắt đầu từ vài tháng trước, khi thằng nhóc Javier nhà tui, 8 tuổi, được tặng một bộ kit Robot làm quà Noel (của bq, tui recommend nha) và tụi tui bắt đầu mày mò với mấy món đồ điện tử cơ bản, arduino này nọ. Mà có sẵn máy in 3D rồi, sau khi ráp vài cái printbot khác, tụi tui mới nghĩ, "Ủa, sao mình không thử tự làm một cái từ đầu xem sao?", "Hay là mình tự thiết kế một cái đi, xem có làm được không?". Tui phải nói là, kiến thức về điện tử, lập trình và tự động hóa của tụi tui lúc đó là "số 0 tròn trĩnh", chỉ trừ vụ thiết kế và mô hình 3D là tui có chút kinh nghiệm, còn lại là phải làm lại hết.
LỜI CẢM ƠN
Trước khi kể tiếp, tui phải cảm ơn anh em nhà bq, nền tảng DIWO của họ, các khóa học robot và nền tảng lập trình kéo thả bitbloq của Arduino. Đặc biệt tui muốn cảm ơn Juan Carlos, từ PROMETEC (http://www.prometec.net) vì khóa học Arduino mở của ông ấy, nếu không có nó thì tui không thể nào làm xong cái này được. Cũng xin cảm ơn Javier Vidal Peña (https://Twitter.com/javidalpe) người đã kiên nhẫn giúp tụi tui làm trang web điều khiển và sửa lỗi code chương trình.
Ý TƯỞNG CHÍNH
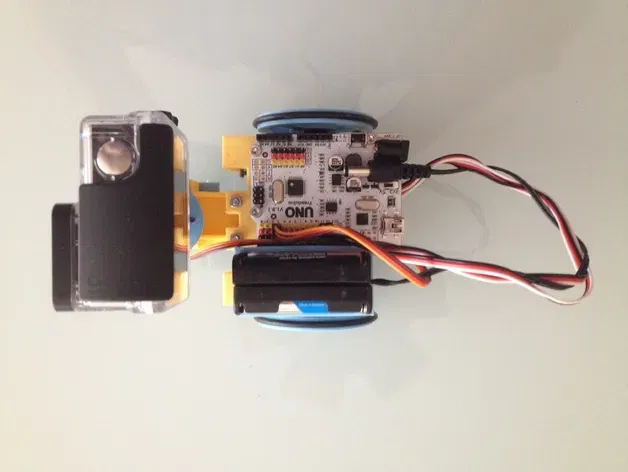
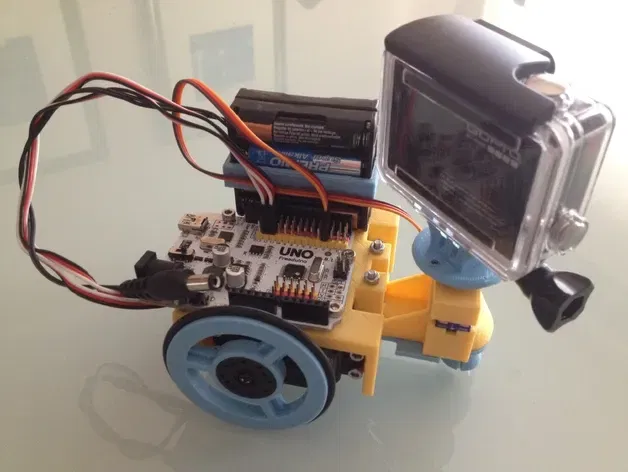
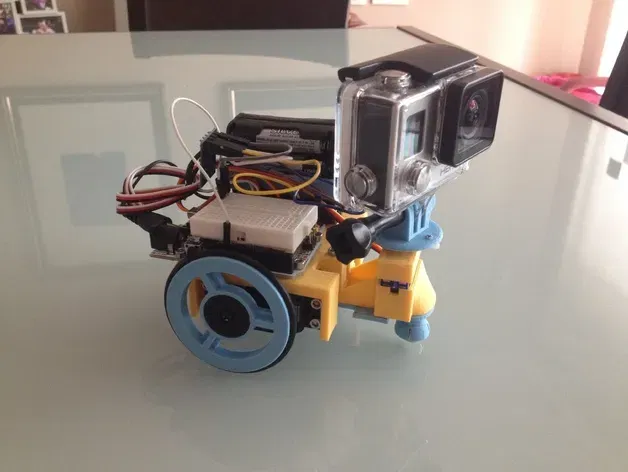
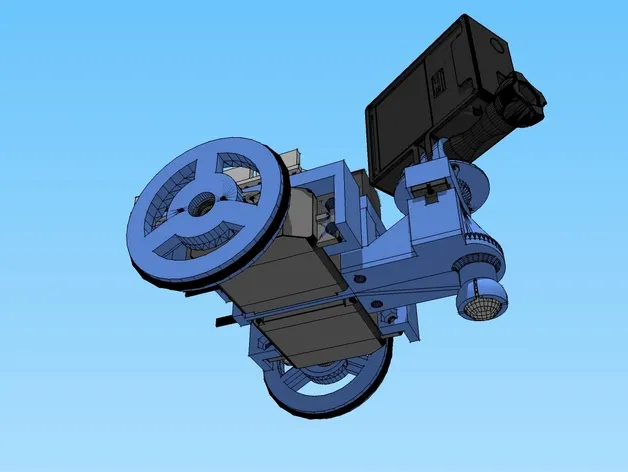
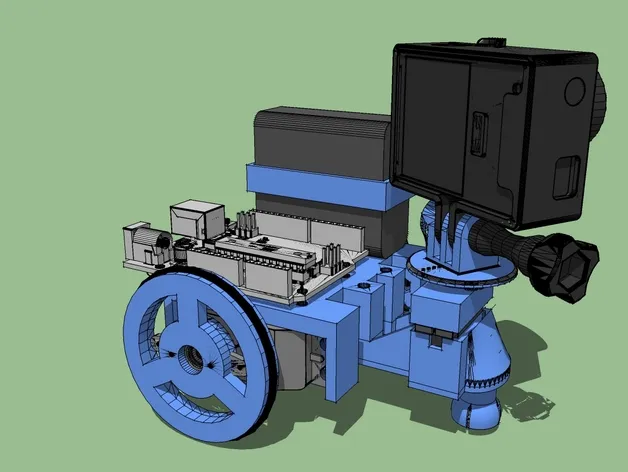
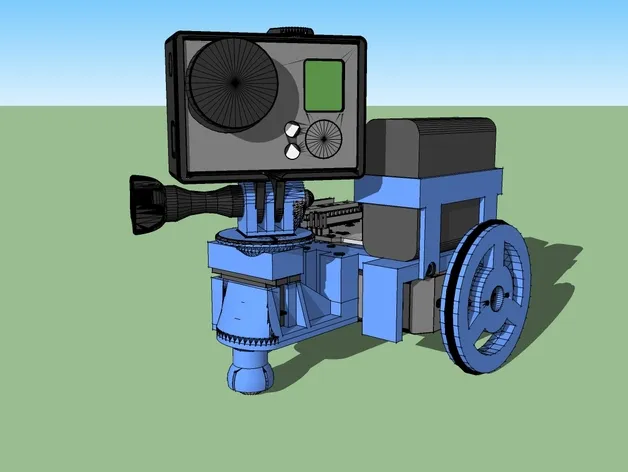
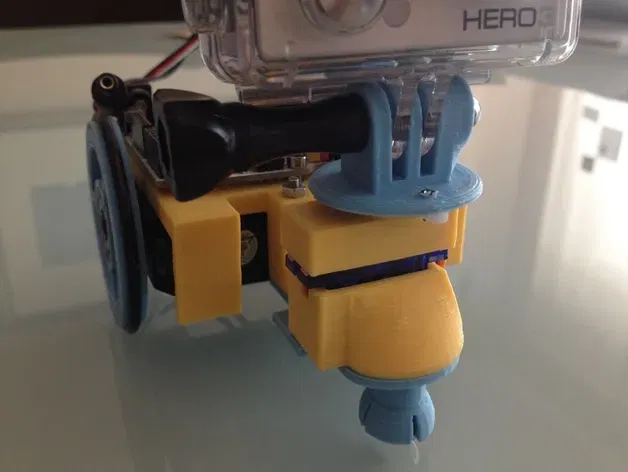
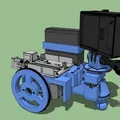
Ý tưởng là làm một con robot điều khiển từ xa, có tích hợp camera, để có thể điều khiển từ xa mà không cần nhìn trực tiếp. Trong các phương án điều khiển từ xa, tui thấy WIFI là hợp lý nhất, vì tui nghĩ nó sẽ cho phép tui có phạm vi hoạt động rộng hơn, phủ sóng tốt hơn và khả năng truyền video thời gian thực, ít nhất là trong một khu vực nhất định, và có thể điều khiển từ xa qua internet (phần này thì còn đang cố gắng). Vì tui có sẵn cái Gopro, cái mà kết nối streaming với điện thoại qua app riêng của nó, nên tui nghĩ một phần công việc đã được giải quyết, và phần còn lại là giải quyết vụ điều khiển chuyển động của robot. Một trở ngại lớn mà tui gặp phải trong những lần thử nghiệm đầu tiên, là phát hiện ra là streaming video có độ trễ vài giây. Tuy nhiên, điều này lại có cái hay, nó làm cho việc điều khiển robot giống như đang lái xe trên sao Hỏa vậy!!!!!! Chắc chắn là có cách khắc phục, nhưng với tui thì nó lại là điểm cộng hơn là điểm trừ. Nói vậy, còn lại thì nó là một chiếc rover với hai servo quay liên tục, gắn trên khung xe, trên đó đặt các linh kiện điện tử và giá đỡ camera, với một micro servo cho phép xoay 180 độ.
CÁC BỘ PHẬN IN 3D
Để thiết kế các bộ phận, tui đã dựa trên kinh nghiệm trước đó khi lắp ráp các printbot của bq (beaetle, và renacuajo) và một vài cái tui thấy trên thingiverse. Tui đã lấy một vài bộ phận từ chúng, rồi tui sao chép và/hoặc chỉnh sửa để có được giải pháp của riêng mình. Ý tưởng là xây dựng một khung xe chắc chắn, đơn giản và gọn gàng. Tui đã dùng autcad và sketchup để thiết kế. Tui có gặp một vài vấn đề nhỏ về va chạm, và vì thế mấy bạn sẽ thấy robot được in hai màu, vì tui đã phải chỉnh sửa một vài bộ phận của mẫu thử nghiệm đầu tiên do vấn đề lắp ráp. Nếu dùng solidworks hay inventor thì không có chuyện này đâu! Các bộ phận tui tải lên ở phiên bản hiện tại là của mẫu thử nghiệm mà mấy bạn thấy đó. Tui đang cố gắng cải thiện một vài thứ, ví dụ như giá đỡ cho wifi.
CÁC LINH KIỆN CHÍNH
Bo mạch điều khiển Freaduino UNO (tương thích với arduino UNO, hoặc tương tự. Cái này có ưu điểm là tích hợp sẵn cổng cắm SVG ở mỗi PIN trên bo mạch) 2 Servo quay liên tục SM-S4303R hoặc tương tự Một micro servo 9g (và ốc vít đi kèm) Module WIFI ESP8266 (cổng FTDI để lập trình nếu cần) Một Camera Gopro Hero 3, kèm giá đỡ (Hoặc loại tương tự có WIFI) Ốc vít và đai ốc M3 (nhiều kích cỡ, 12, 14, 30 mm, v.v.) Một viên bi hoặc viên bi ve hoặc vòng bi đường kính 12 mm 2 vòng đệm O-ring 50 mm Một hộp pin 8 x AAA Một bo mạch cắm mini Vài sợi dây nối bo mạch
CHỨC NĂNG CHÍNH VÀ ĐIỀU KHIỂN
Tiến, lùi, quay trái, quay phải và dừng. Di chuyển camera sang phải, sang trái và về vị trí trung tâm.
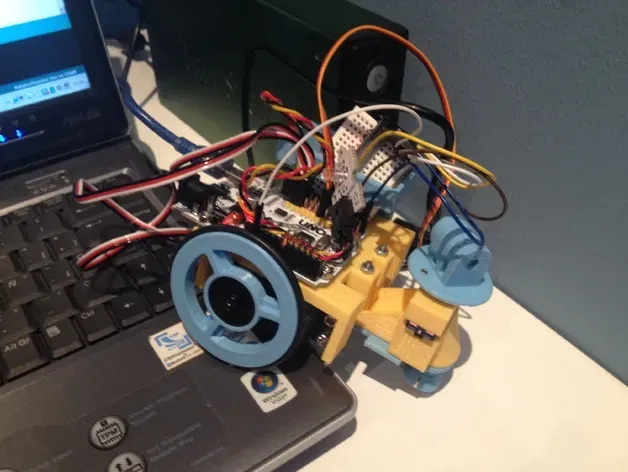
Với trang web điều khiển, bạn có thể điều khiển bằng cách nhấn vào các phím mũi tên. Bạn cần chạy các lệnh AT sau đây trong màn hình serial của Arduino:
AT+CIFSR? // Lệnh này sẽ cho bạn biết địa chỉ IP của ESP8266 AT+CWLAP="tured","tucontraseña" // Lệnh này chỉ chạy một lần, vì nó sẽ được lưu lại.
Trên trang web điều khiển có một ô để bạn điền địa chỉ IP của printbot của bạn (địa chỉ bạn nhận được sau khi chạy lệnh AT+CIFSR?).
Tui recommend mấy bạn xem qua các hướng dẫn về ESP 8266 trên www.prometec.net, ở đó họ giải thích rất rõ cách cấu hình ESP8266 và những điều cần lưu ý. http://www.prometec.net/arduino-wifi/
Tui có đính kèm chương trình điều khiển, vẫn còn đang trong giai đoạn sửa lỗi và cải thiện. Tui hoan nghênh mọi góp ý và đóng góp (Đây là phần yếu nhất của tụi tui đó ;) ). Và như tui đã nói, tui đưa lên bản Beta, chạy chưa hoàn chỉnh. Tui hy vọng vài ngày nữa sẽ có bản hoàn chỉnh, sửa lỗi và tinh chỉnh hơn. Tui đăng vậy, với hy vọng có ai đó rành hơn sẽ giúp đỡ tui một tay!
Tập tin controlweb.html chạy trên trình duyệt để điều khiển printbot (giữ phím mũi tên để di chuyển, thả ra để dừng).
Cuối cùng, đây là vài video từ giai đoạn thử nghiệm (chạy lặp lại và chưa có điều khiển WIFI). Sẽ sớm có video điều khiển từ xa:
https://www.youtube.com/watch?v=HMv9-_M3Ngg https://www.youtube.com/watch?v=LGqeGaWIHyk
Giấy phép

File mô hình







Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!