Robot cân bằng tự động sử dụng servo Parallax 360

Robot tự cân bằng bằng cách sử dụng 360 servos servos
1.5K
Lượt Xem
15
Lượt Thích
149
Lượt Tải
Cập Nhật Nov 18, 2025


Mô tả
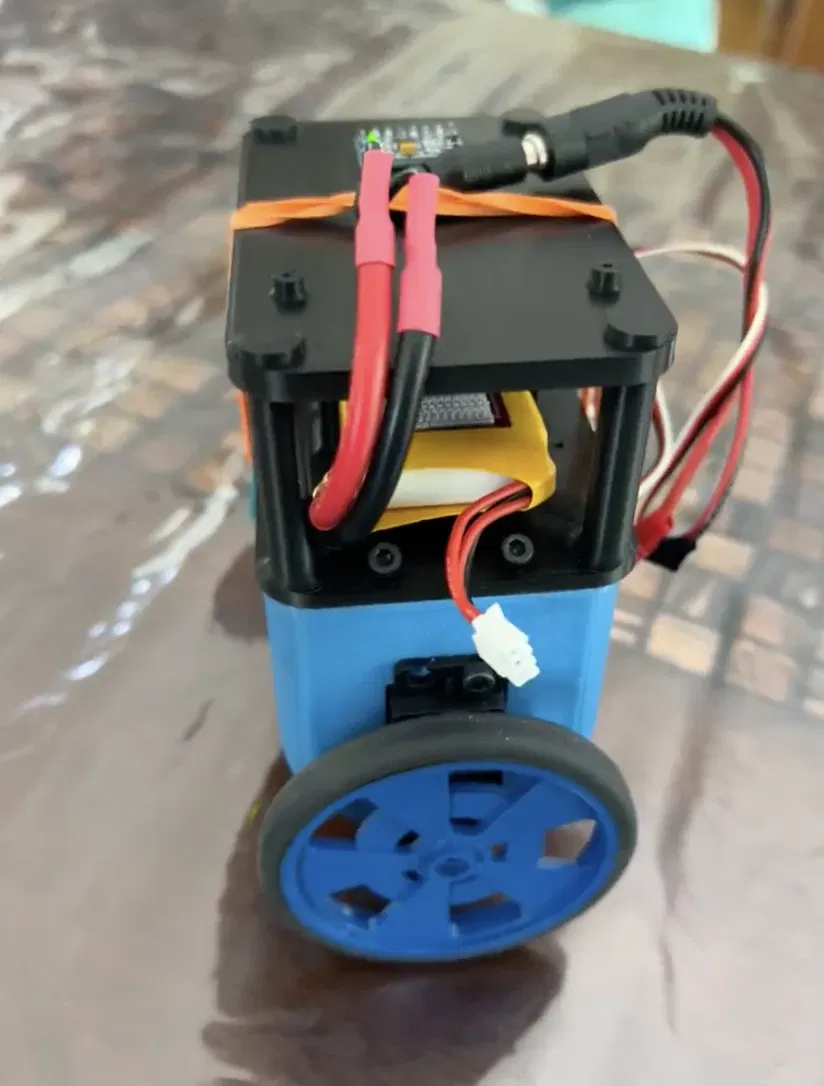
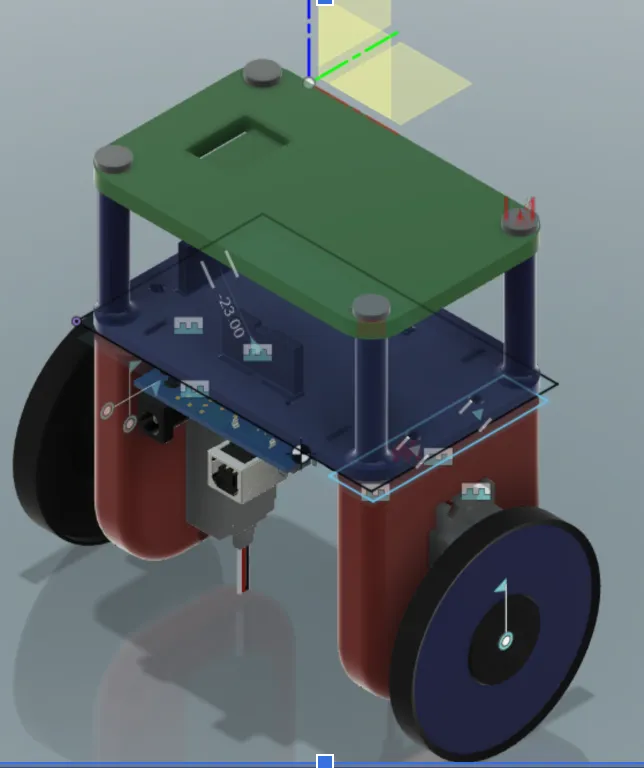
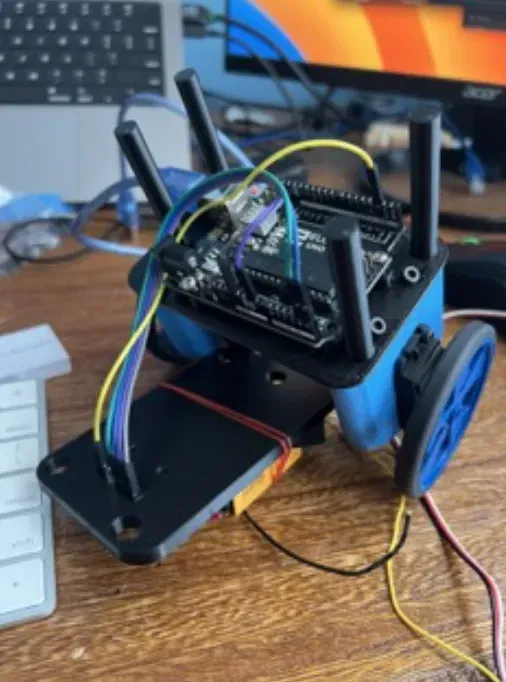
Đây là một mô hình tôi tạo ra của một robot tự cân bằng.
Nó cần một Arduino uno, 2 servo 360 parallax, và một cảm biến gia tốc mpu6050.
Mã code được đính kèm, nhưng bạn có thể cần điều chỉnh các giá trị PID để đạt hiệu suất tối ưu.
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...

Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!