Bộ mã hóa quay DIY 70mm với nam châm neodym

Bộ mã hóa quay mạnh mẽ DIY với nam châm neodymium.

















Mô tả
Bộ mã hóa quay tự chế
đường kính ngoài: 74mm
Bộ mã hóa quay 10 vị trí cho hoạt động thủ công. Tất cả các bộ phận từ máy in 3D. Có thể dễ dàng tái tạo. Bộ mã hóa quay được thiết kế cho hoạt động thủ công. Đặc biệt là nơi có ít vị trí thuận lợi cho hoạt động (ví dụ: 2 tiến, 3 lùi). Giữ 10 vị trí bằng nam châm cho kết quả định vị rõ ràng mà không cần nhiều nỗ lực. Bằng cách loại bỏ các nam châm bên trong, bộ mã hóa cũng có thể được sử dụng như một bánh xe chạy tự do.
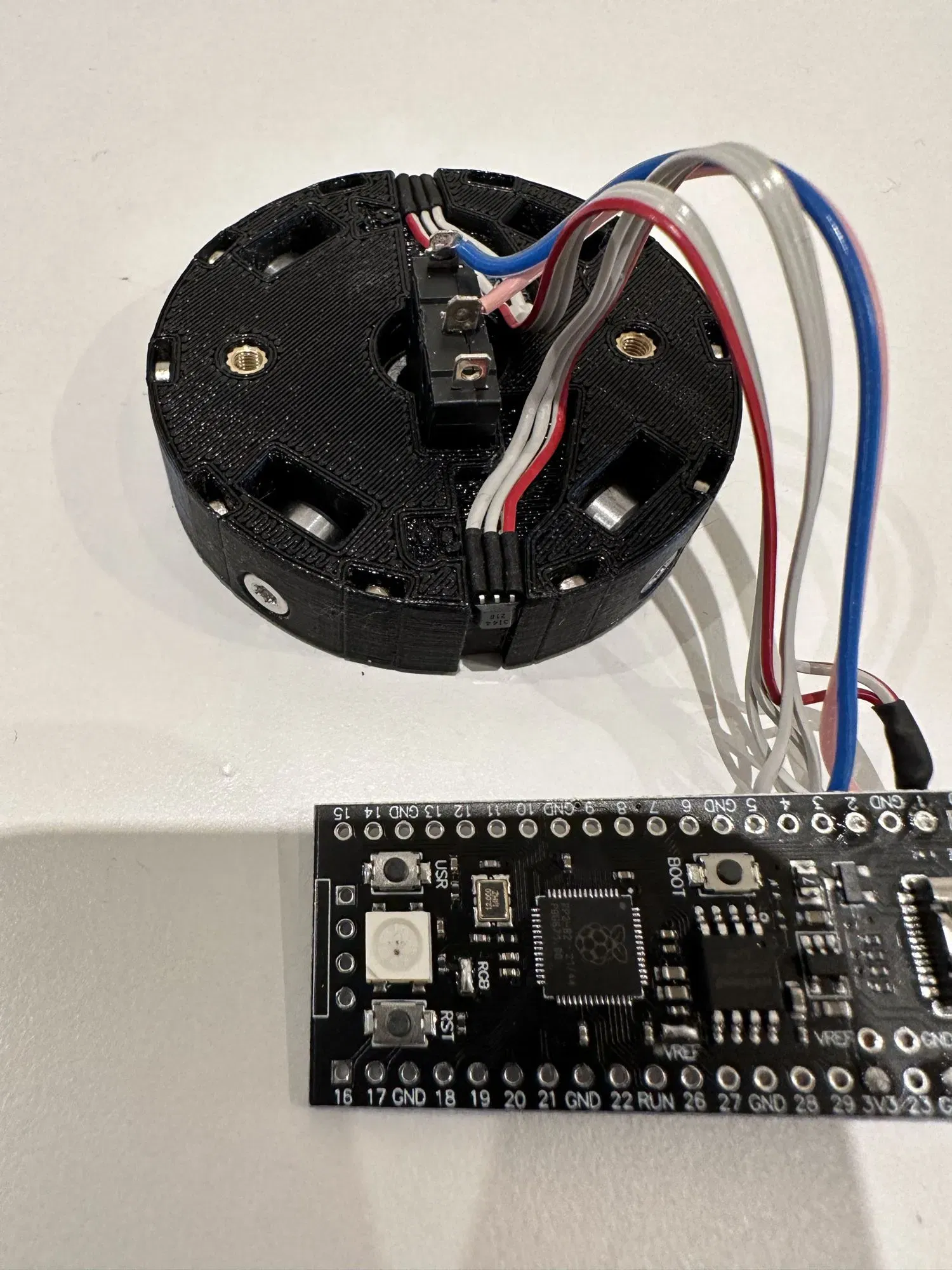
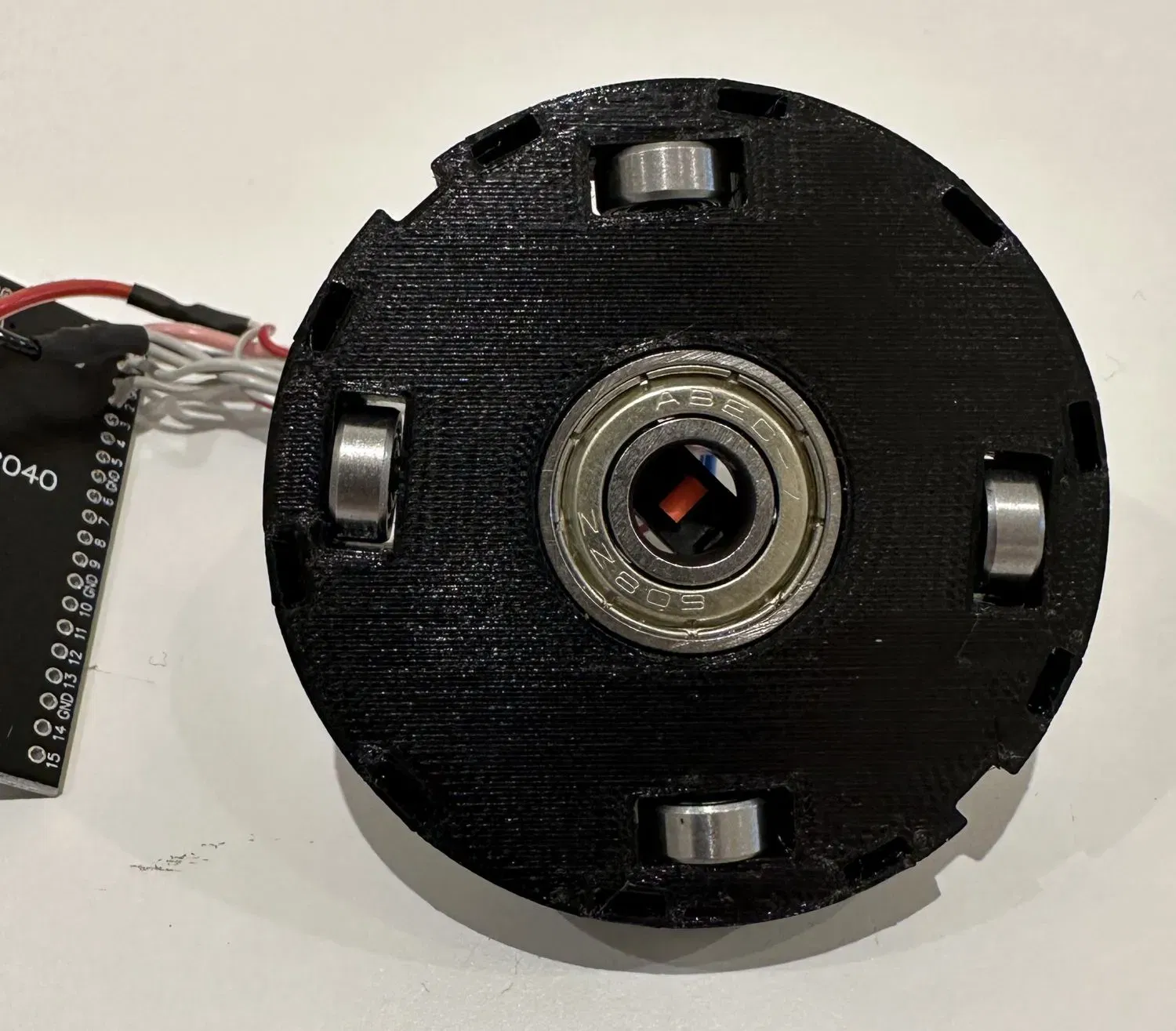
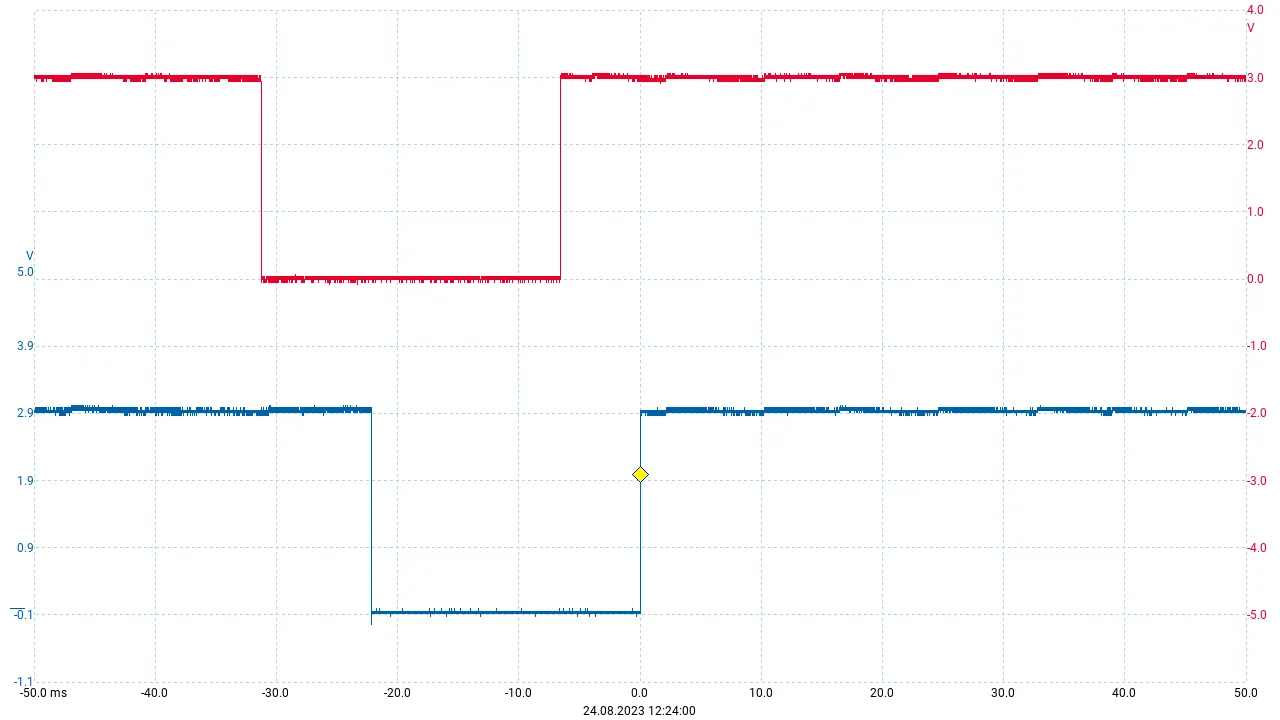
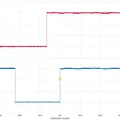
Bộ mã hóa quay bao gồm vòng trong cố định với các giá đỡ cho 5 ổ bi, các cảm biến Hall và nút bấm. Ổ bi trục ổn định độ đồng tâm, 4 ổ bi hướng ra ngoài ổn định trục ngang của bộ mã hóa (độ ổn định). Vòng ngoài có thể xoay được. Nút bấm được điều khiển qua ổ bi trục. Hai vòng đều có 10 nam châm mà “khớp” vào vị trí. Chúng cũng kích hoạt các cảm biến Hall. Sự quay được phát hiện bằng 2 cái. Cảm biến Hall A3144. Vị trí của các cảm biến được lệch một chút. Sắp xếp này tạo ra một tín hiệu lệch pha có thể được phần mềm đánh giá. Nó cho phép phát hiện quay theo chiều kim đồng hồ và ngược chiều kim đồng hồ. Các nam châm vị trí trên vòng ngoài đóng vai trò là nam châm kích hoạt. Một công tắc vi mô SS5D tiêu chuẩn được sử dụng làm nút bấm.
Các bộ phận bổ sung cần thiết:
1 cái ổ bi 608-ZZ (8mm, 22mm)
4 cái ổ bi 623-ZZ (3mm, 10mm)
1 cái công tắc vi mô SS-5D
2 cái cảm biến Hall A3144
20 cái nam châm neodymium 5x1.5mm
4 vít chìm M3x15
5 vít chìm M3x6
1 vít đầu trụ M3x5
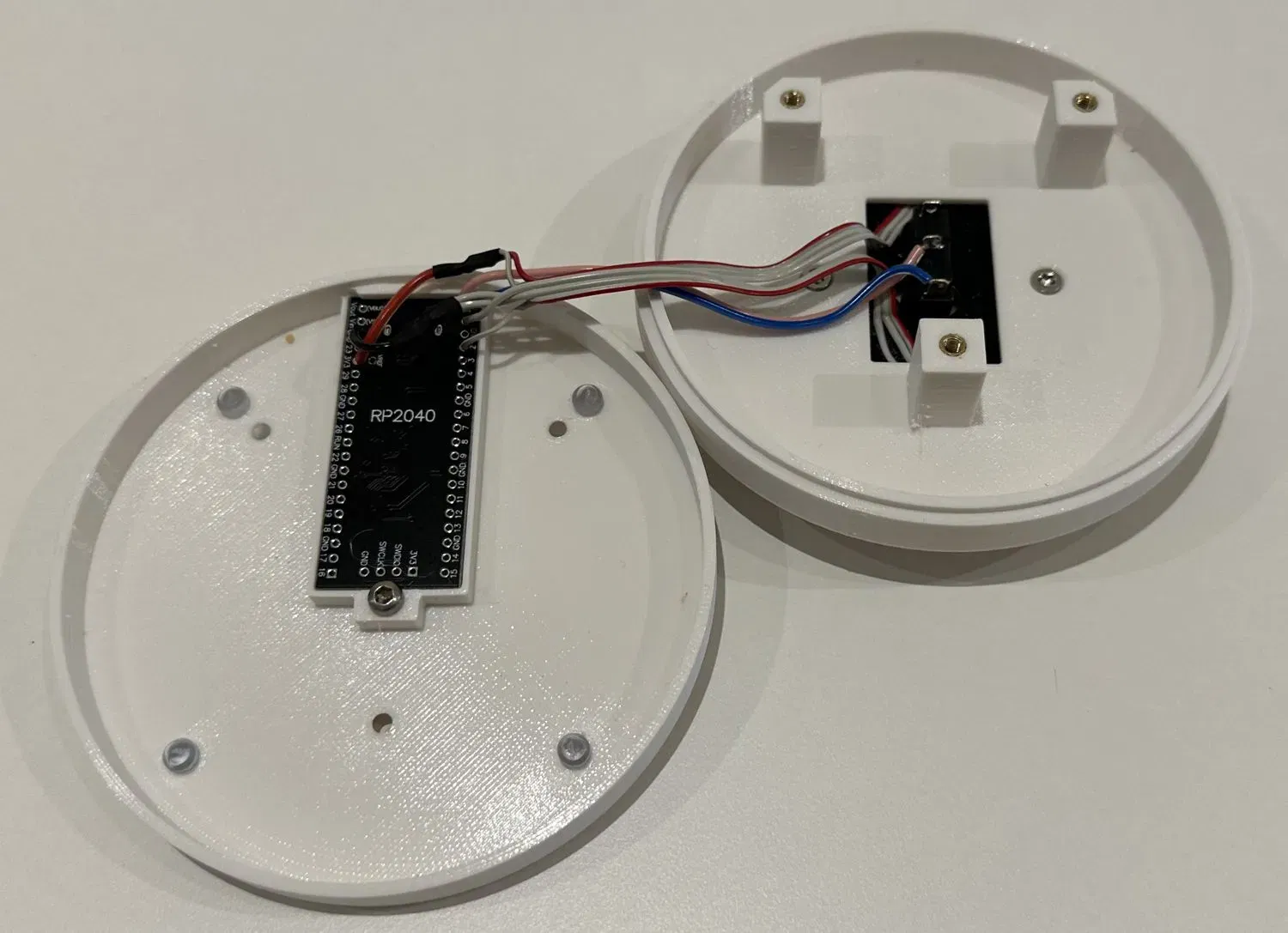
1 cái vi điều khiển Raspberry PI Pico hoặc tương tự
Lắp ráp
In ra tất cả các bộ phận. Tôi đã sử dụng PETG nhưng PLA cũng sẽ hoạt động tốt. Bạn cần 10 miếng đệm. Dán nút vào lò xo (keo siêu dính). Kết nối các cảm biến Hall và dán chúng vào đế bộ mã hóa bằng keo siêu dính. Dán công tắc vi mô vào chỗ lõm bằng keo siêu dính. Trượt nắp vào phía trên và cố định bằng keo. Chèn các nam châm vào các khe được cung cấp. Quan trọng: Các nam châm và cảm biến Hall phải có định hướng chính xác (N/S) → kiểm tra nó!.
Mẹo: Để có một chuyển động mượt mà hơn, tôi đã dán một đĩa giấy vào bên trong của DecoderTop.
Đế tùy chọn phục vụ như một vỏ bọc điện tử.
Phần mềm:
Hai cảm biến Hall cung cấp cùng một tín hiệu như một bộ mã hóa quay tiêu chuẩn. Do đó, mã phần mềm có sẵn cho hầu hết tất cả các vi điều khiển. Tôi đã chọn Raspberry PI Pico. Bất kỳ bộ điều khiển nào khác cũng sẽ hoạt động.
Chúc bạn vui vẻ!
Tôi đã tạo ra một bộ mã hóa trên cho phiên bản bánh xe jog tự do. Điều này có 20 điểm dừng và cung cấp 20 tín hiệu mỗi vòng.
Giấy phép

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!