Gimbal FPV nhỏ gọn cho camera Walksnail 19mm
Pan camera FPV nhỏ gọn và Gimbal nghiêng tập trung vào kích thước dọc ngắn
Mô tả
Gimbal FPV nhỏ gọn không cần khoảng trống dọc bổ sung cho servo quay.
Thiết kế này tập trung vào kích thước dọc ngắn và phức tạp hơn một số thiết kế khác.
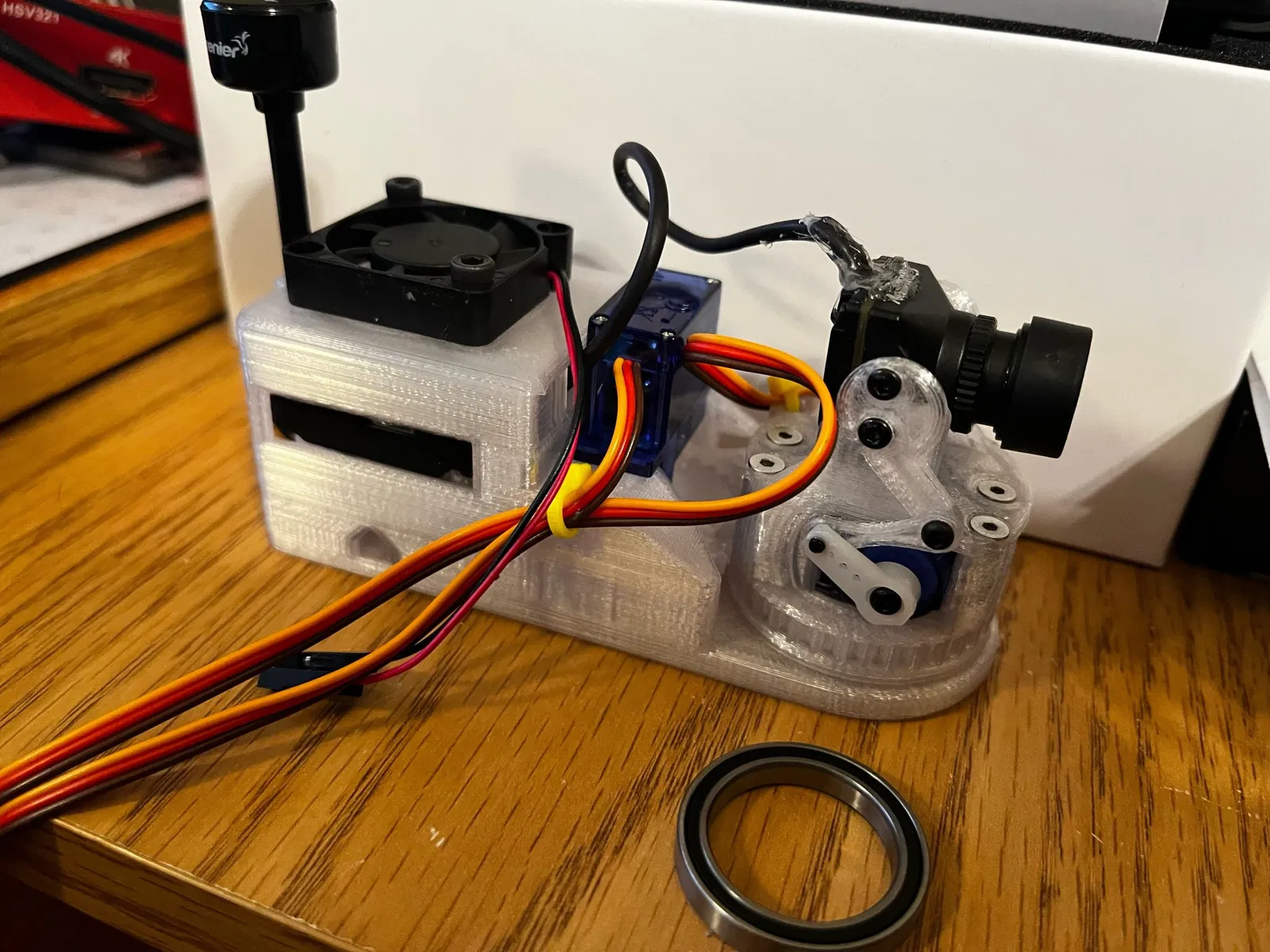
Thiết kế cho camera Walksnail 19mm và VTX V1/V2.
Đã thử nghiệm với camera analog 19mm, một chút keo thay thế cho vít thứ hai.
In 1x mỗi phần, tấm đế sẽ cần hỗ trợ. 2 lớp 20% là đủ trong PLA.
Phần cứng cần thiết
-1x vòng bi 6704 (20x27x4mm) B082PS5HHN
-2x servo 9g (22x12.2x23mm) B072V529YD
-1x quạt 30x30mm, chiều cao không quan trọng cho việc lắp đặt B0792BW2VH
-1x hệ thống camera, camera là phần không thể tách rời của cấu trúc hệ thống nghiêng
-các dây buộc nhỏ cho quản lý dây
Thiết kế để sử dụng quạt 30x30mm cho làm mát VTX trong khi trên bàn/chuẩn bị bay
-2x hoặc 4x vít đầu nút M2.5, chiều dài phụ thuộc vào độ dày của quạt (10/12mm có thể).
Vít tối thiểu cần thiết nếu sử dụng vít servo (sẽ cần cắt tỉa cho khoảng trống)
-7x M2.5x10mm countersunk cho phần trên của pan
-2x M2x4mm đầu nút cho liên kết nghiêng
-4x M2x6mm đầu nút cho bánh xe nghiêng
-4x M2x16mm đầu nút cho lắp đặt VTX
-4x M2 đai ốc cho WS VTX V1
Vít cần thiết để thay thế vít bộ servo để tất cả đều sử dụng cùng một công cụ hex key
-2x M2x4mm đầu nút cho bánh răng pan
-4x M2x6mm đầu nút cho gốc servo và servo pan
Tất cả các vít M2 cần thiết đi kèm với bộ WS VTX
- Vít PanBearingCap vào BasePlate với Bearing ở giữa bằng 3x vít M2.5x10mm có đầu chìm
- Cắt PanGear và một Servo Horn để phù hợp với nhau, vít lại với 2x M2x4mm
- Đặt PanGear vào BasePlate với mặt Servo Horn hướng lên
- Đặt Pan Servo vào BasePlate và vít vào bằng 2x M2x6mm
- Căn giữa Pan Servo và gắn vào PanGear bằng 1x M2x6mm, căn giữa PanGear về phía trước
- Ép PanLower vào Bearing, phải vừa khít nhưng không quá khó khăn, căn chỉnh răng với PanGear sao cho PanLower được căn chỉnh về phía trước với các lỗ vít lệch sang bên phải (khi nhìn từ phía sau)
- Nếu việc căn chỉnh không đúng, chuyển sang PanGearPlus5deg, kiểm tra chuyển động pan để có vị trí căn giữa và hành trình mong muốn tại thời điểm này
- Chèn Tilt Servo vào PanLower, với 4x vít M2.5x10mm có đầu chìm PanUpper để giữ servo ở vị trí
- Với 2x M2x4mm lắp ráp TiltLink vào TiltWheelB2 và một Servo Horn, nơi TiltLink nằm ở bên ngoài của TiltWheelB2 và ở bên trong và dưới Servo Horn, gợi ý cắt Servo Horn và sử dụng lỗ thứ 4 từ giữa
- Lắp ráp cụm cuối cùng vào Tilt Servo đã căn giữa bằng M2x6mm
-TBD: phiên bản DJI, phiên bản HDz, phiên bản đơn giản không có giá đỡ VTX.
Giấy phép
File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!