Đây dựa trên công việc thiết kế xuất sắc của ProfessorBoots, người đã tạo ra Mini-Skidi điều khiển từ xa, sử dụng ESP32 có khả năng kết nối wifi. Công việc gốc của ông ấy có tại đây: https://www.instructables.com/3D-Printed-RC-SkidSteer-V20/ Rubber Remix được tạo ra để hỗ trợ việc sử dụng lốp cao su/silicon mềm dễ tìm và nó đã giải quyết một vấn đề về hệ thống truyền động mà tôi đang gặp phải. Các lốp cụ thể được sử dụng trong bản remix này được hiển thị trong hai video dưới đây và có sẵn từ một số cửa hàng trên AliExpress (và có thể là những nơi khác). Kể từ đó, tôi đã thêm một số cải tiến về độ vừa vặn và độ bền của các kết nối. Tôi cũng đã sửa đổi một chút thùng chứa (để ngăn các răng bị mắc kẹt dưới các vật thể) và làm cho xe nâng hẹp hơn để hỗ trợ nâng tất cả các cạnh của một pallet nhỏ hơn. Tôi đã thêm một 'đèn nháy dự phòng' lên đỉnh của lồng và một tính năng giám sát pin LiPo 2S. Mã để dừng cánh tay đã được sửa đổi thành 'phanh' thay vì trượt. Nếu bạn thấy cánh tay của mình rơi xuống đất khi bạn cố gắng dừng nó ở giữa không trung, bạn có thể muốn xem xét bản sửa đổi này. Có một tệp PDF lắp ráp trong CÁC TỆP KHÁC chi tiết những thay đổi lắp ráp cơ bản cho các bộ phận đã được sửa đổi ở đây. Video dưới đây cho thấy một số sửa đổi trước đó nhưng có thể không phản ánh trạng thái hiện tại của tất cả các bộ phận. Cập nhật ngày 26 tháng 10, '23
Đã sửa đổi mã phát hành để điều khiển tất cả các ĐỘNG CƠ N20 bằng PWM. Cũng bao gồm 3 bản sửa đổi khác a) phanh cánh tay b) nút lên/xuống c) vị trí trượt tốt hơn khi khởi động. skidiBrakeV2PWM.ZIP Cập nhật ngày 7 tháng 10, '23
Tôi đã thêm một tài liệu giải thích cách 'phanh' động cơ cánh tay. Nếu bạn thấy rằng cánh tay của bạn rơi xuống hoàn toàn xuống đất, khi bạn định dừng nó ở giữa không trung, hãy đọc PDF trong phần CÁC TỆP KHÁC để giải thích cách khắc phục điều này. Tôi cũng đã sửa đổi mã đã phát hành (tháng 10 -23) để NGĂN động cơ cánh tay, và để thay thế các nút mũi tên trên động cơ cánh tay để chúng hiển thị LÊN/XUỐNG. Mã đã phát hành nằm trong CÁC TẬP TIN KHÁC và được gọi là “skidiBrake.zip”. Cập nhật ngày 6 tháng 10, '23
Tôi đã sửa đổi xe nâng để nó hoạt động với tất cả các cạnh của một pallet nhỏ hơn một chút. Tôi thấy với các sửa đổi, pallet nhỏ hơn của tôi có thể chứa tải nặng hơn một chút mà không bị nghiêng Skidi. Tôi đã bao gồm STL của cả hai. Những cái này hoạt động tốt với mô hình Kho của Wim V. Tôi đã thêm một số cải tiến để làm cho nó không thể bị Skidi tại: Cập nhật ngày 4 tháng 10, '23
Đai giữ động cơ cánh tay của tôi không đủ chặt để giữ động cơ cánh tay không bị trượt sang một bên dưới kẹp và ngắt kết nối bánh răng cánh tay, vì vậy tôi đã thêm một số dải căn chỉnh để giữ chặt hơn. armMotorRestraint.stl là phần mới. Bây giờ không may, điều này chỉ hoạt động cho động cơ 6v@15 rpm, có thể không có trong các bộ. Tôi thích động cơ 15rpm vì sức mạnh và độ mượt mà của chúng. Những cái này có kích thước vật lý khác nhau trong phần bánh răng kẹp dưới hỗ trợ và vì vậy hỗ trợ này được thiết kế tùy chỉnh cho mô hình 15rpm. Tôi đã thêm tệp STEP để bạn có thể sửa đổi cho các động cơ nhanh hơn. Khi lắp đặt, không định hướng các bánh răng để chúng cọ vào nhựa. Cập nhật ngày 19 tháng 9, '23
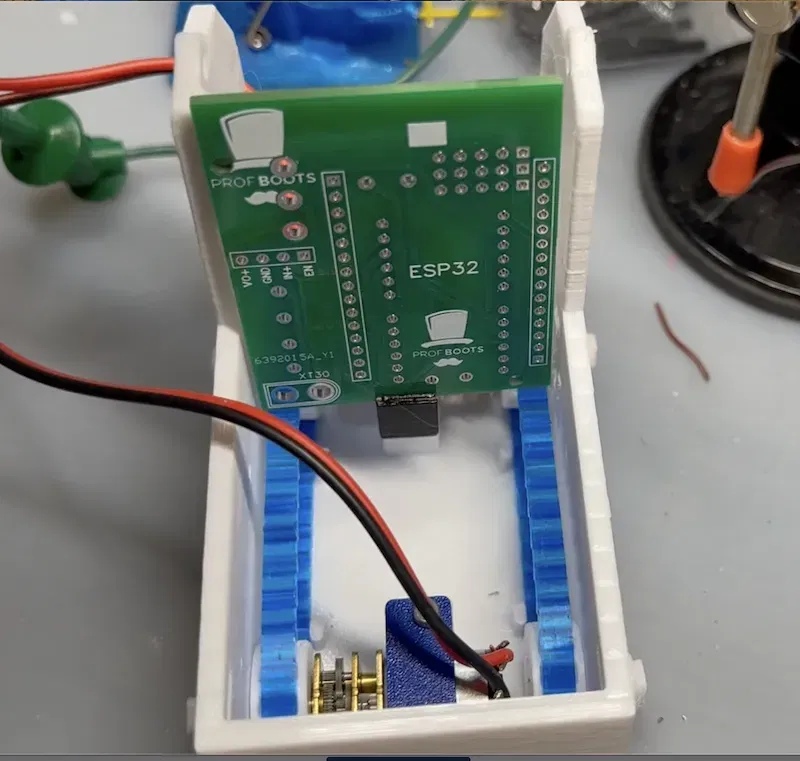
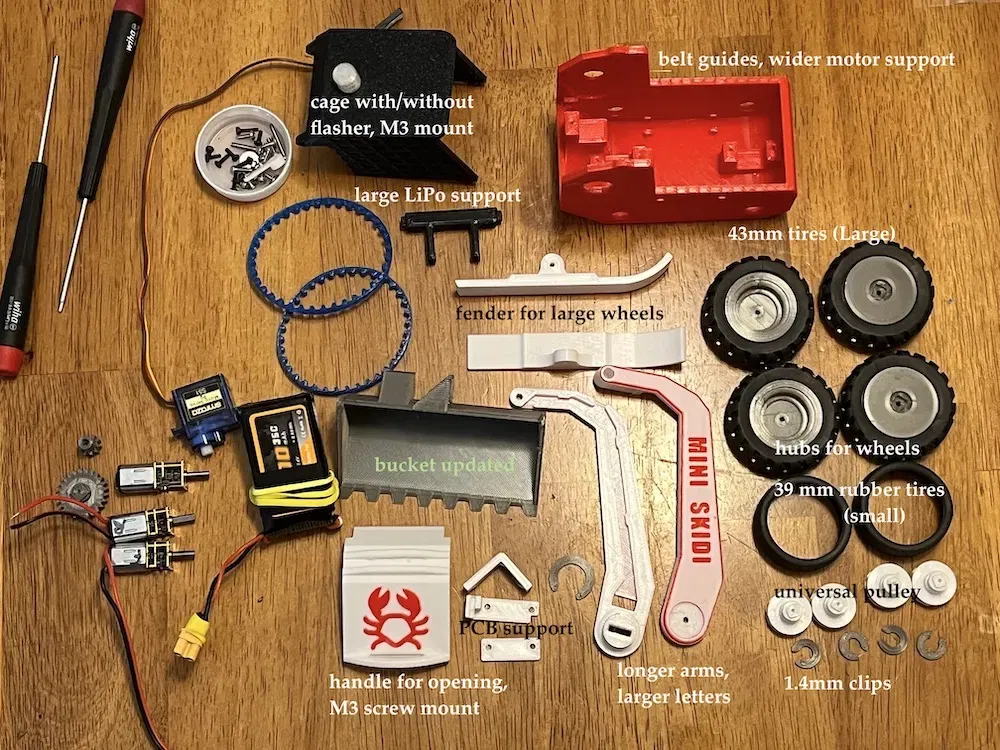
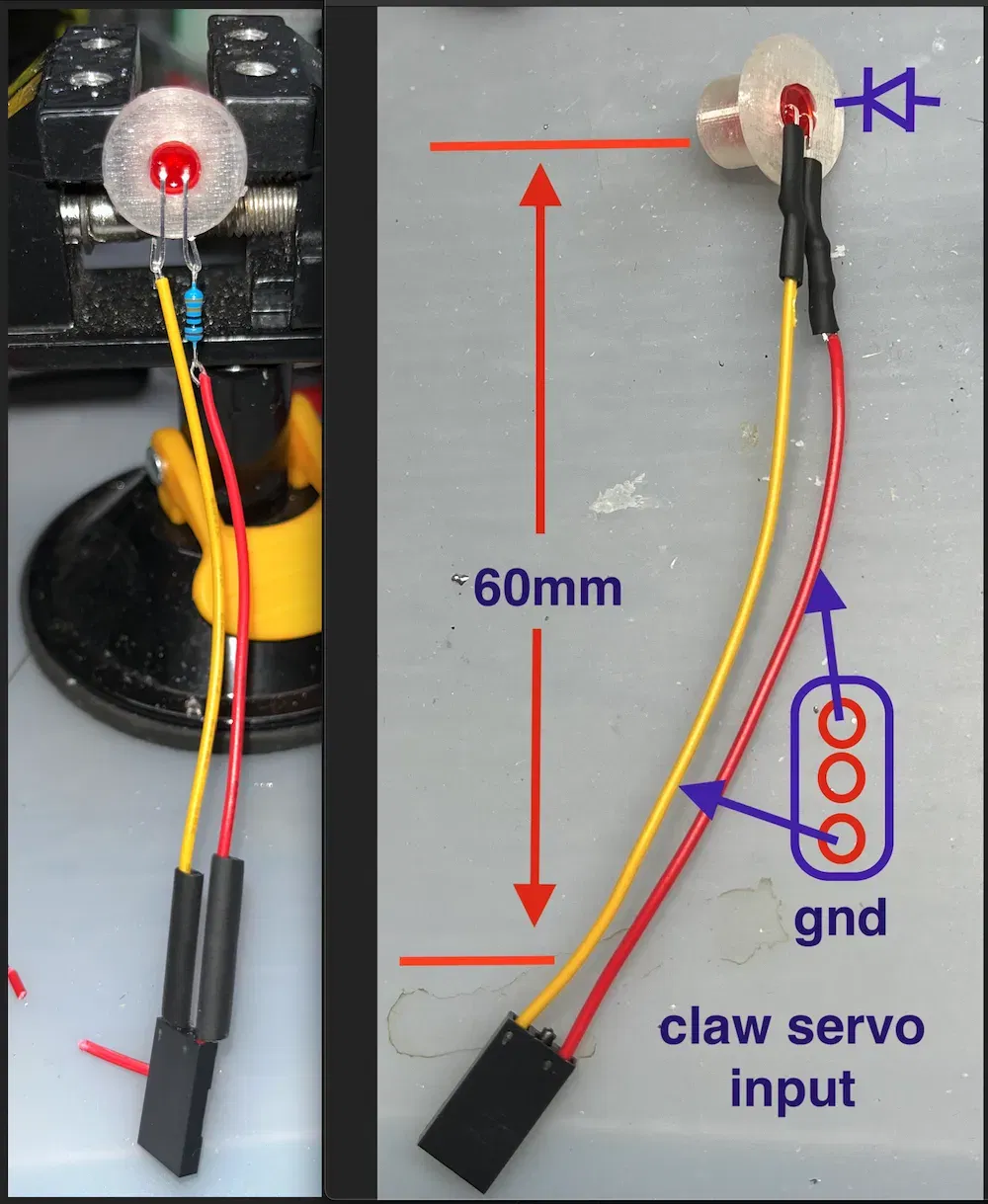
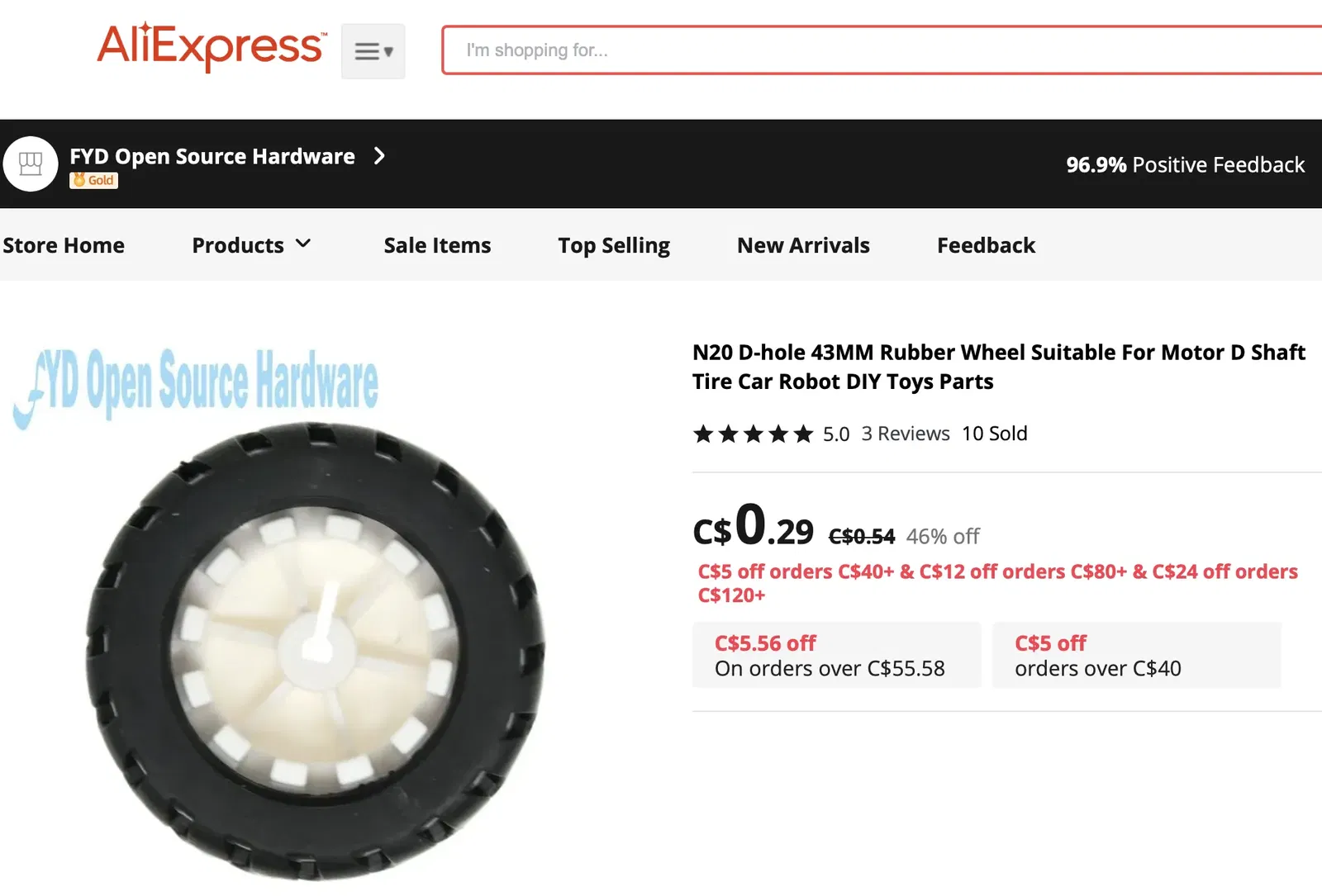
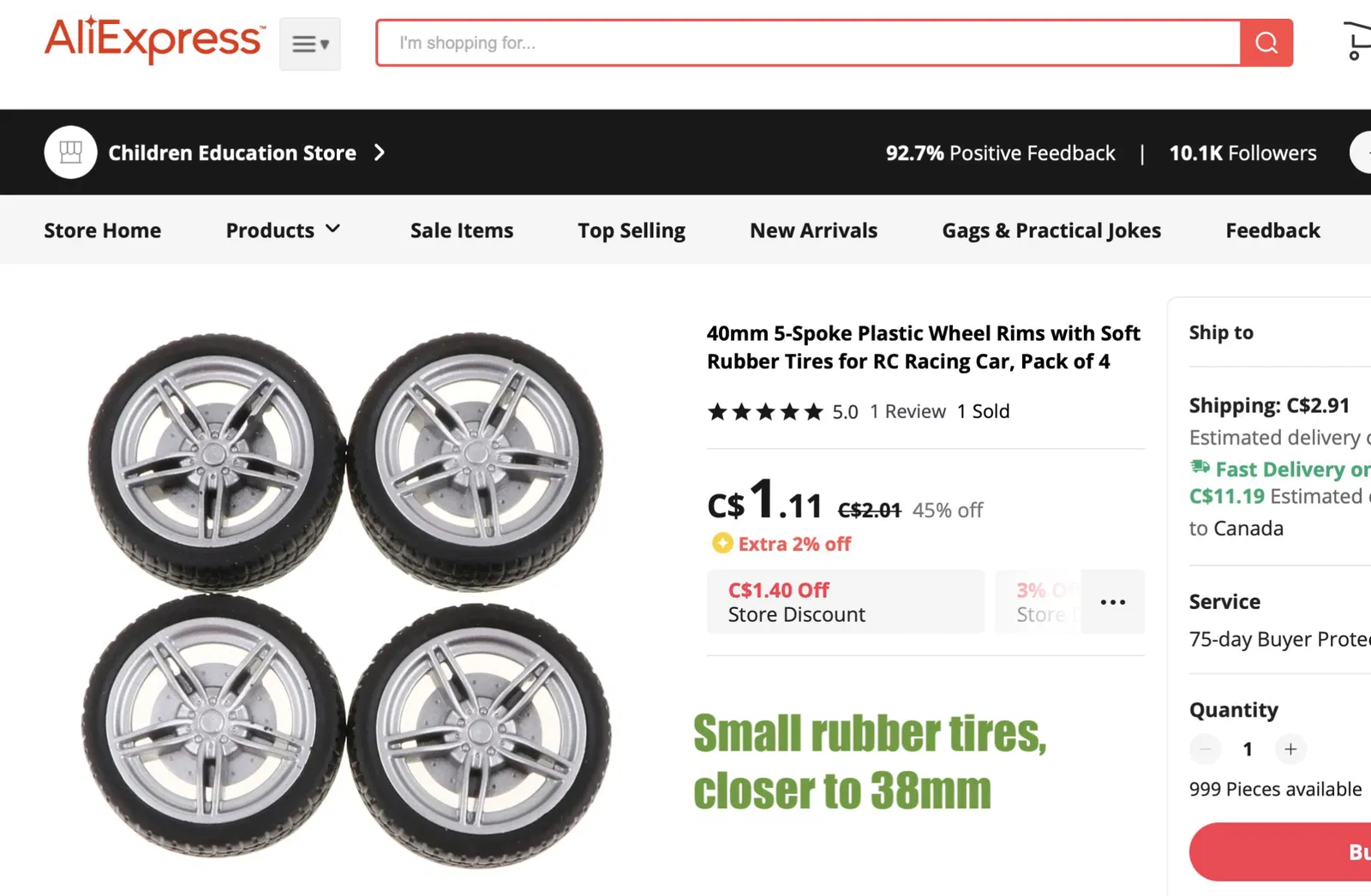
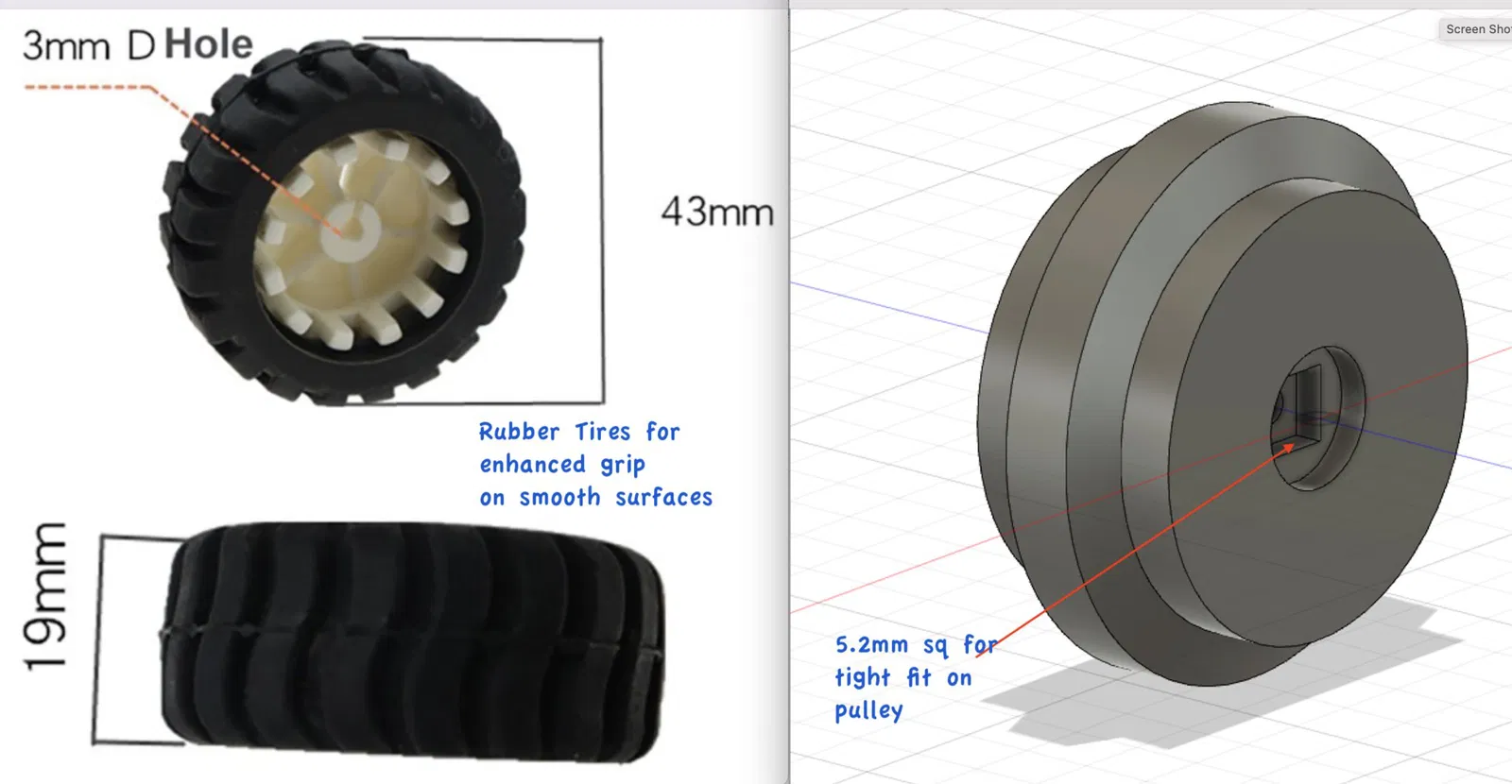
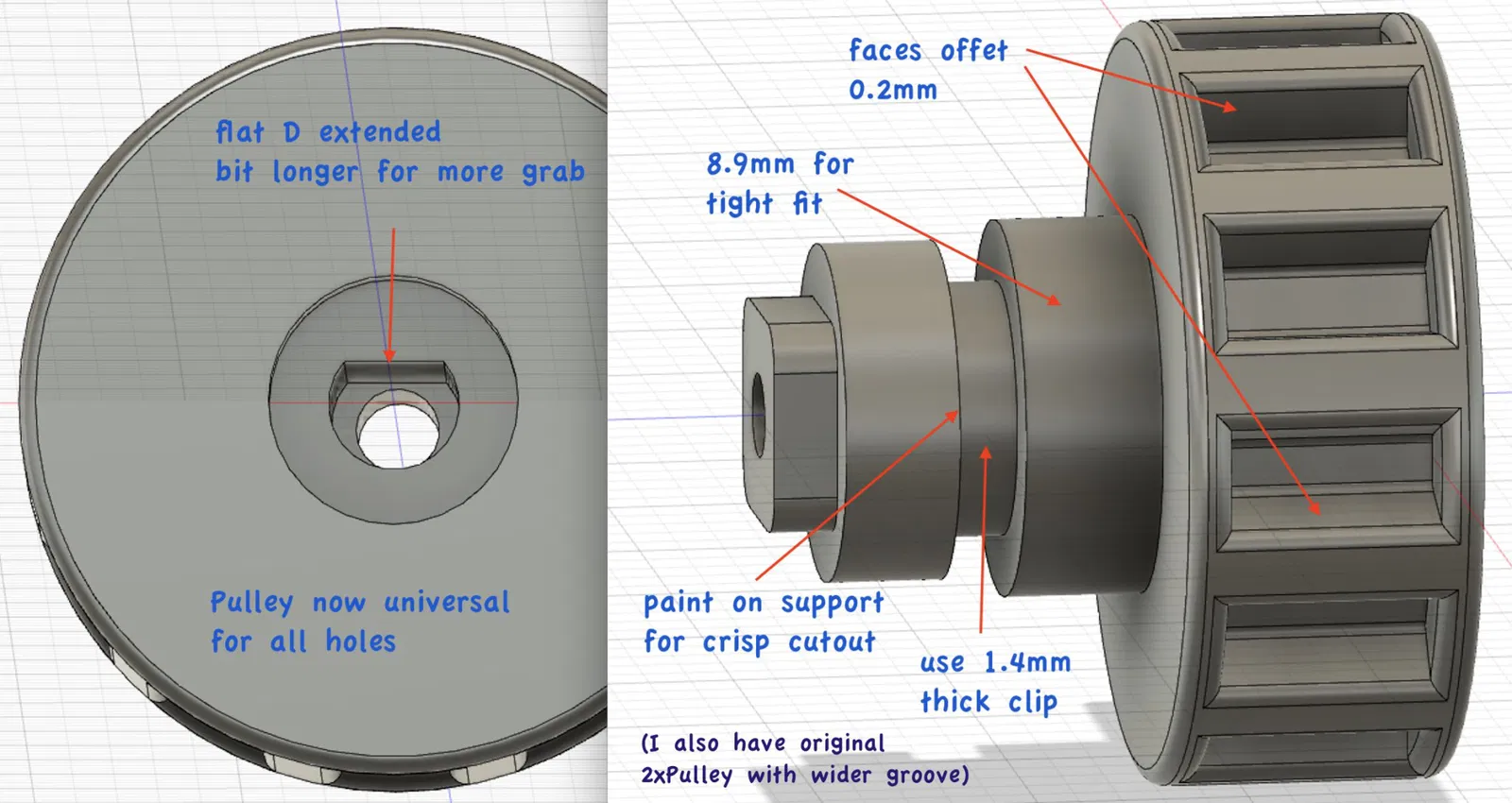
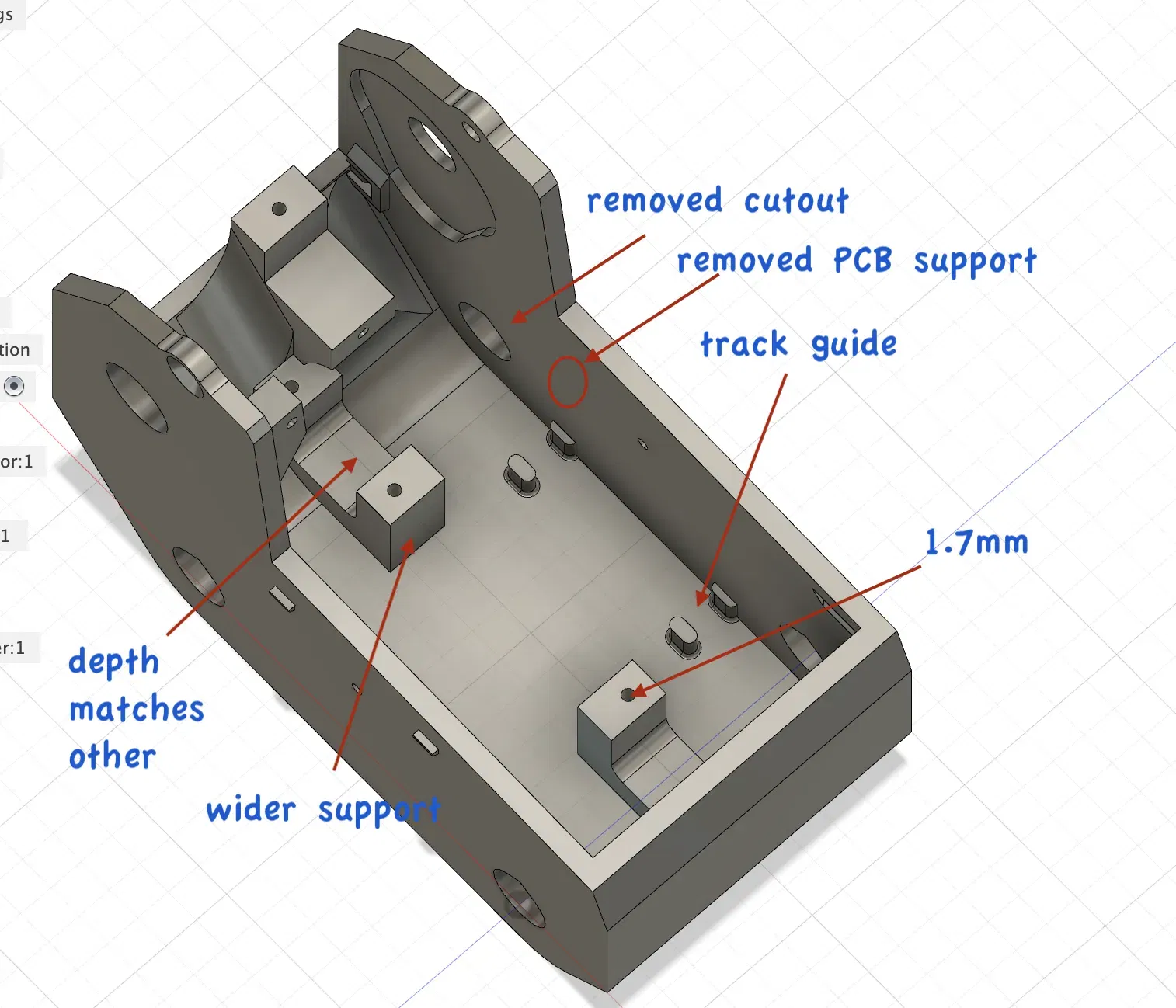
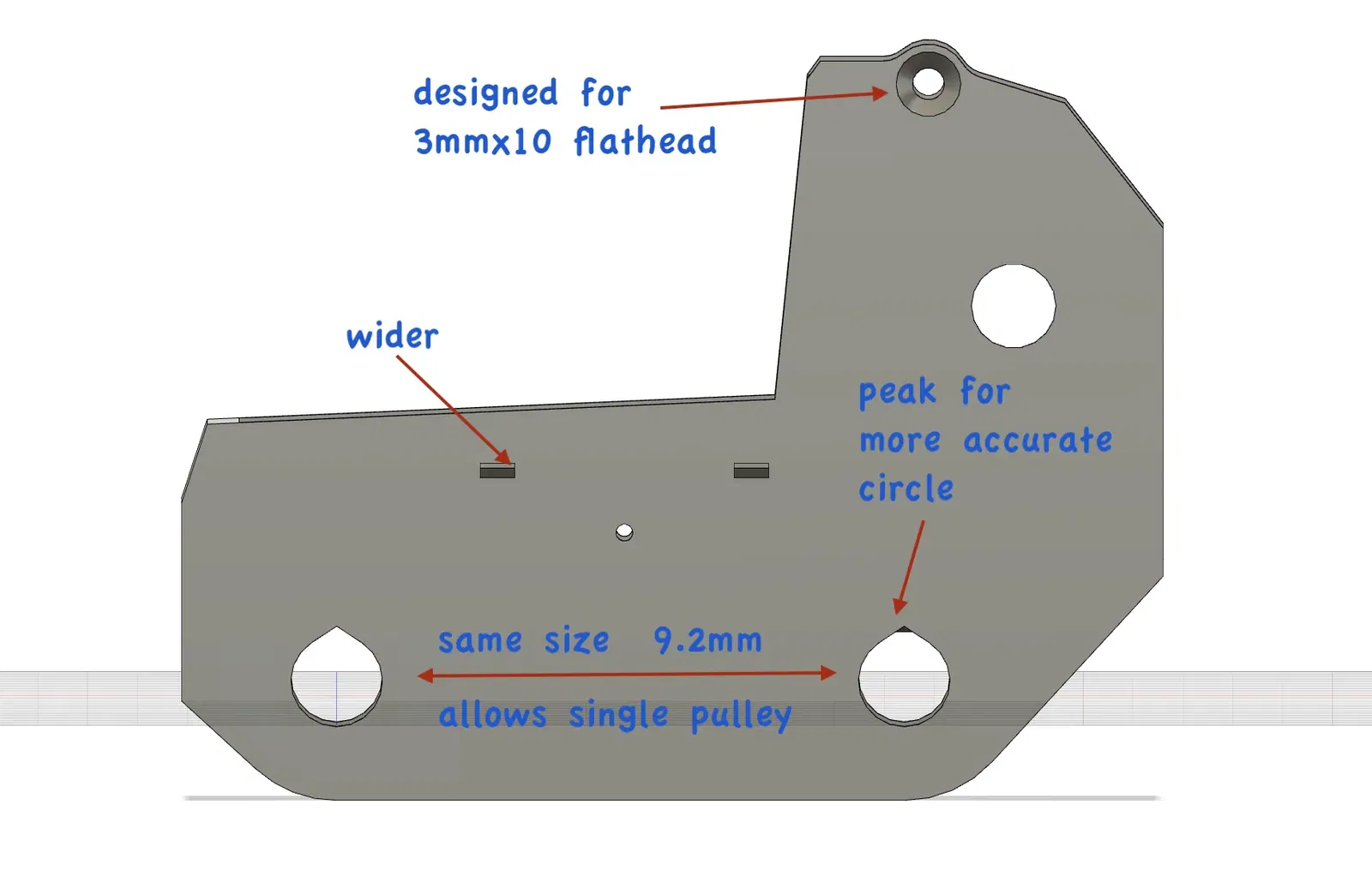
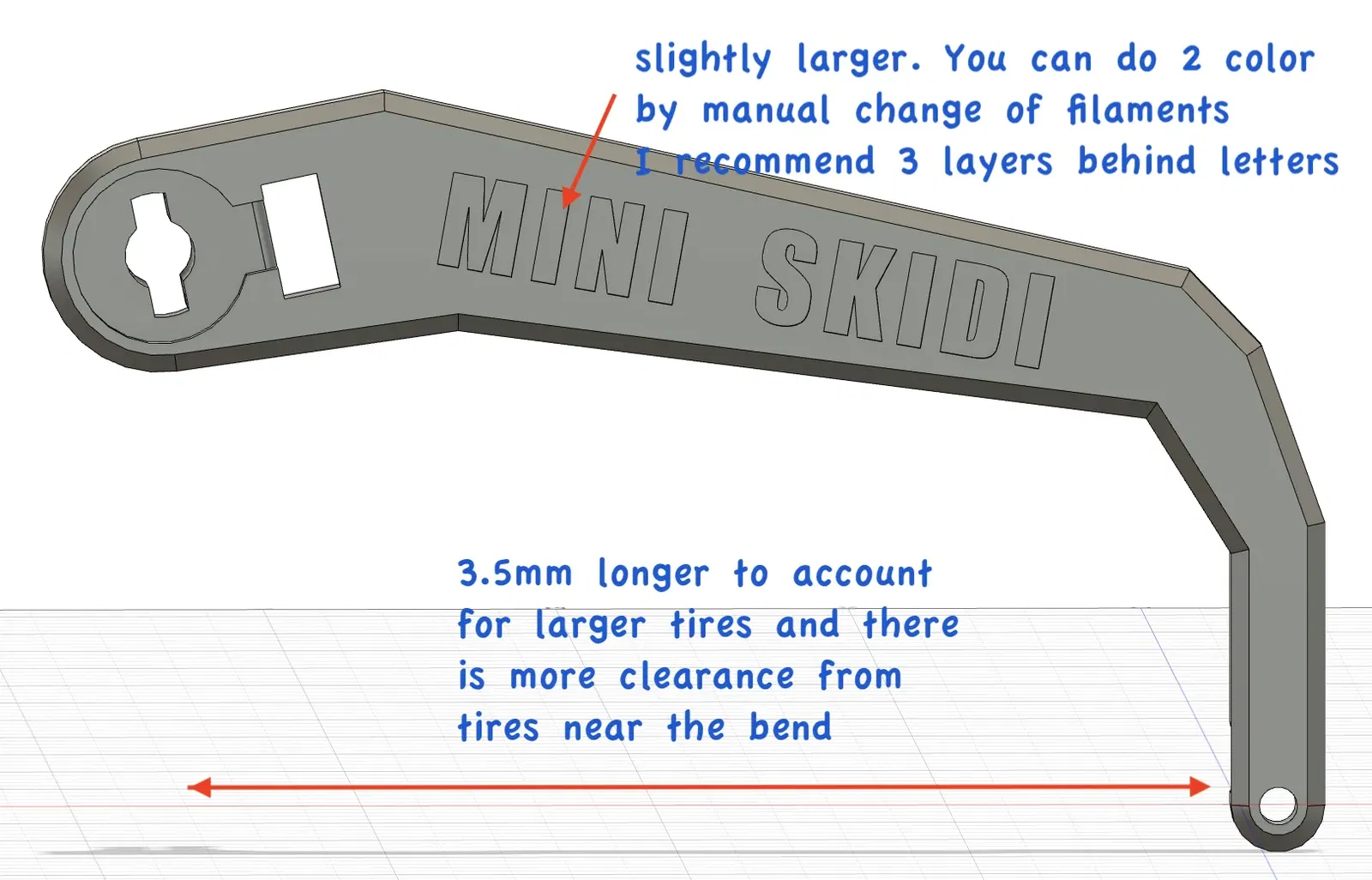
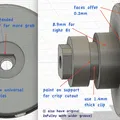
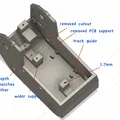
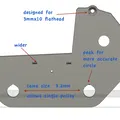
Tôi đã thêm V2 cho nhiều bộ phận. Những cái này đã tăng độ sâu của kết nối vuông giữa các ròng rọc & ổ trục bánh xe; và giữa bánh răng cánh tay và cánh tay trái. Các bánh răng cánh tay có răng rộng hơn để làm cho chúng mạnh hơn khi khớp nhau. (In phần trên của bánh răng cánh tay ở độ cao lớp 0.1mm) Cái chắn bùn cung cấp nhiều khoảng trống hơn cho lốp cao su lớn. Cập nhật 17 tháng 9, '23: Tôi đã phát hiện ra rằng các răng của xô bị mắc kẹt nếu bạn sử dụng một điểm dừng để đẩy một vật vào, để bạn có thể nâng nó lên. Tôi đã sửa đổi xô để các răng không còn có thể đi dưới một điểm dừng như vậy. Điều này sẽ ngăn chặn servo xô và/hoặc động cơ tay nâng quá tải. Xem các hình ảnh ở trên để so sánh. Xô này có cùng lỗ gắn để hỗ trợ kẹp nguyên bản. V2 hiện hỗ trợ một servo bánh răng kim loại có thân dài hơn 2mm so với loại nhựa. Cập nhật: 16 tháng 9, '23: Tôi đã thêm một tính năng theo dõi pin cho các SKIDIs của tôi. Mặc dù không cần các bộ phận in 3D, tôi đã thêm một tệp PDF mô tả phần cứng và phần mềm cung cấp tính năng này. Hiện tại, tôi sử dụng cả đèn LED tích hợp trên CPU và đèn nhấp nháy trên mái lồng để cung cấp chỉ báo trạng thái pin (1 đến 5 lần nhấp) và để cung cấp trạng thái khi pin quá thấp và cần được sạc lại. HIỆN TẠI ở V2. Cập nhật: 11 tháng 9, '23: Đã thêm một đèn LED nhấp nháy màu đỏ vào đỉnh của lồng. Xem bên dưới để biết chi tiết Cập nhật: 10 tháng 9, '23: Một số nhà chế tạo đã gặp sự cố gãy trục tay phải trên mẫu nguyên bản. Tôi chưa bao giờ gặp vấn đề đó, nhưng đã thêm hỗ trợ trục bổ sung cho tay phải và sửa đổi vỏ để chấp nhận trục có đường kính lớn hơn một chút của tay phải. Tôi cũng đã thêm hỗ trợ cho một bánh xe cao su nhỏ hơn (38mm) không yêu cầu các tay dài hơn hoặc chắn bùn cao hơn. (mặc dù các tay dài hơn cho phép một phạm vi khớp nối rộng hơn của xô). Xem video bên dưới. Cập nhật: 30 tháng 8, '23: Tôi đã thêm một ròng rọc đa năng với lỗ trục rộng hơn một chút. Một số người phàn nàn rằng họ đã làm hỏng động cơ N20 của mình khi cố gắng lắp đặt nguyên bản. Điều này do máy in đã xuất quá mức một chút và lỗ quá nhỏ. Ròng rọc đa năng 'rộng' tăng kích thước trục từ 3.15mm lên 3.35mm. **************************************************************************************************** Nếu bạn muốn sử dụng lốp cao su lớn hơn, bạn sẽ cần sử dụng các cánh tay dài hơn và các vè cao hơn. Một bánh xe cao su nhỏ hơn, (xem hình ảnh để biết thông tin đặt hàng và video bên dưới) có độ bám ít hơn so với lốp cao su lớn, nhưng nhiều hơn so với TPU. Nó quay mà không có bất kỳ ‘nhảy’ nào và là một sự thỏa hiệp khá tốt giữa TPU và bánh xe lớn hơn có độ bám rất tốt. Tuy nhiên, bánh xe lớn hơn thì là một ‘quái vật’ thực sự cho địa hình! Các cánh tay dài hơn cũng hoạt động tốt với các bánh xe cao su nhỏ hơn. Video bên dưới cho thấy 2 loại lốp khác nhau và hiệu suất của chúng, cũng như hoạt động của cánh tay với các động cơ có tùy chọn RPM khác nhau. Nó cũng chứng minh tính năng ‘phanh’ của các bộ điều khiển động cơ H-Bridge. Một giá đỡ pin lớn hơn cũng được giới thiệu. Bản remix này sử dụng một “pulley” hoặc trục truyền động “đồng nhất” trên tất cả các bánh xe, và được thiết kế cho vỏ bọc đi kèm. Pulley ở đây được thiết kế để cung cấp khả năng kết hợp tốt hơn của dây đai TPU. Các thiết kế được phát hành đầu tiên có xu hướng bị lệch khỏi pulley, nhưng tôi nghĩ rằng điều đó đã được cải thiện rất nhiều. Các cánh tay mới chỉ cần thiết để cung cấp khoảng trống cho các lốp lớn hơn mới. (nhưng hoạt động tốt với các lốp nhỏ hơn) Nắp và lồng là tùy chọn, và bây giờ được gắn bằng một vít M3 x 10 đầu phẳng ở mỗi bên. Nắp có một tay cầm để dễ dàng mở và có logo của tôi (tôi không thể cưỡng lại). Đây là một video để giúp những ai có thể gặp khó khăn trong việc lấy khách hàng tiềm năng về các động cơ N20 hoặc lắp đặt các bộ phận của dây curoa. Điều này KHÔNG được trình bày bằng cách sử dụng vỏ đã chỉnh sửa của tôi với các hướng dẫn dây curoa vì tôi không có một cái in thêm vào thời điểm đó. Với vỏ của tôi, dây curoa giữ thẳng hàng tốt hơn, nhưng nó cũng bị mắc vào cột hướng dẫn khi bạn lắp động cơ, và bạn sẽ cần một cái nhíp cong nhỏ để kéo dây curoa lên và quanh cột hướng dẫn để nó nằm sát vào tường vỏ khi bạn hạ động cơ vào vị trí hỗ trợ của nó. Cập nhật Flasher: Tôi đã thêm hỗ trợ cho việc gắn một đèn LED nhấp nháy lên mái của lồng. Tôi đã sử dụng một đèn LED nhấp nháy đỏ 5mm (kính đỏ). Tôi đã thiết kế một vỏ flasher bằng cách sử dụng filament trong suốt. In với chỉ 1 đường viền để cầu nối không bị chùng. (0.2layer 5walls top/bottom) Có 2 phiên bản của lồng. Một cái có một lỗ 10mm ở trên cùng để chèn vỏ flasher và dán nó vào lồng. (dán vành của vỏ vào mặt dưới của lồng). Bạn sẽ cần hàn một điện trở 220-330 (220 sáng hơn một chút) ohm vào một chân của LED. (xem hình trên để biết hướng dẫn lắp ráp). Sau đó, bạn sẽ kết nối với một đầu nối 3 chân. (Không sử dụng chân giữa). Hiện tại, bạn chỉ có thể gắn nó vào vị trí mà càng servo cắm vào. cực dương của LED nên được gắn vào đầu của khối đầu nối và sẽ đi đến chân D22 của ESP32. Cực âm của LED đi đến đầu vào GND. (Một đầu của LED đến đầu trên của đầu nối, chân còn lại đến đáy). Mặc dù có 3 'cổng' khác trên khối đầu nối, nhưng không cổng nào đi đến cổng đầu ra phù hợp để sử dụng. Bạn có thể cắt một mạch PCB và nối một trong ba kết nối đầu cuối chưa sử dụng đến D2 hoặc D4 để sử dụng và tôi sẽ cung cấp thông tin về điều đó sau. Sử dụng ống co nhiệt sau khi gắn LED và đầu nối.. Một đầu nối cái Dupont 3 chân là tốt nhất (nếu bạn có một servo bị hỏng, hãy cắt bỏ đầu nối). Bây giờ, tôi để bạn sửa đổi mã của bạn; nhưng chỉ cần đặt pinMode(22, OUTPUT). Tôi chỉ sử dụng flasher khi lùi lại, vì vậy trong câu lệnh CASE lùi, hãy thực hiện một digitalWrite đến flasher với HIGH (hoặc 1). digitalWrite(22,HIGH);* Ngay trước câu lệnh CASE, viết một LOW (hoặc 0) vào flasher để nó tắt, trừ khi nó đang lùi lại. Bạn sẽ cần uốn các chân LED gần mặt dưới của lồng hướng về khối đầu nối vì PCB có thể gây cản trở nếu bạn để các chân thẳng xuống. V2 của vỏ flasher ngắn hơn và chặt chẽ hơn một chút. Một video về flasher đang hoạt động có ở đây: Các phần mà tôi không thay đổi được tìm thấy trong dự án gốc. Một số tệp STEP đã được bao gồm. Vui lòng liên hệ với tôi nếu bạn muốn các tệp STEP khác.












































Chưa có bình luận nào. Hãy là người đầu tiên!