Cơ chế hiệu chỉnh Z tự động cho V-Core 3

Thiết kế cơ bản của giải pháp cho hiệu chuẩn Z tự động được chuẩn bị cho v-core 3.

Mô tả
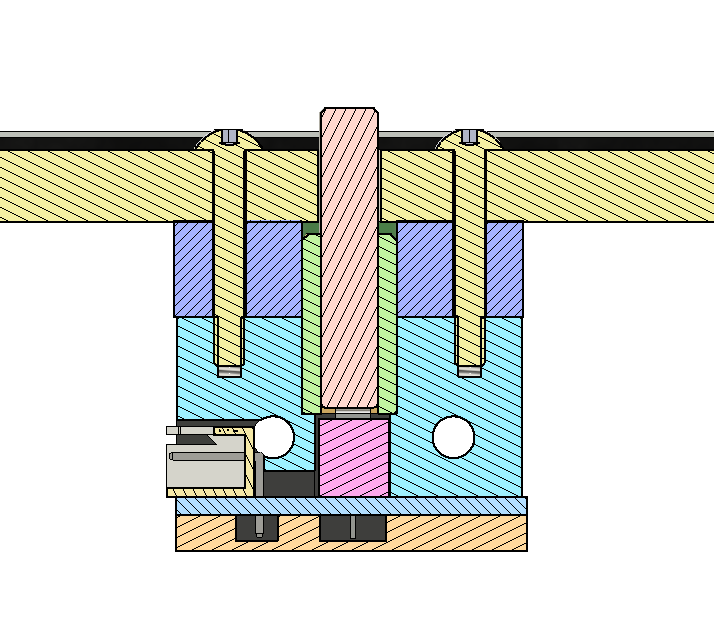
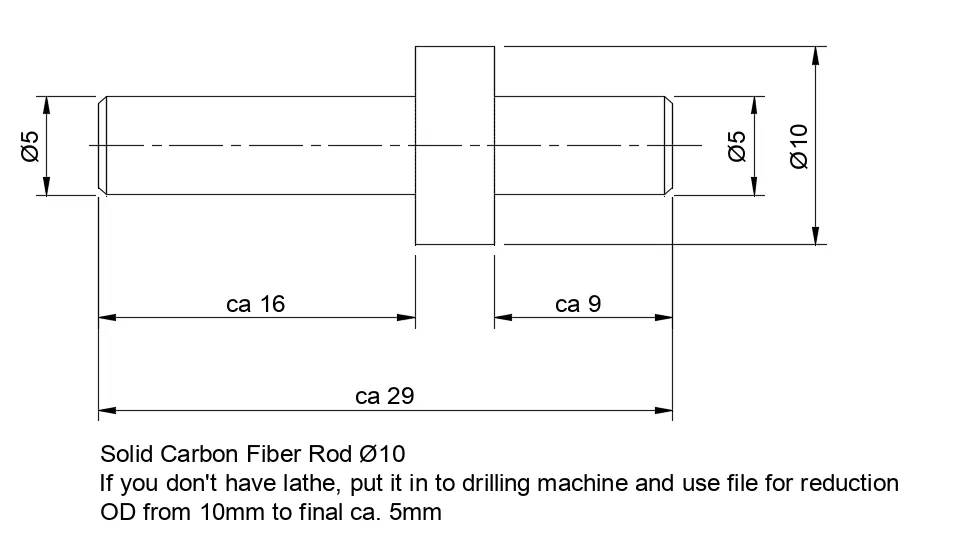
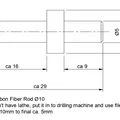
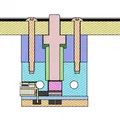
22.10.2023: hình dạng mới của pin. Tôi đã gặp một số vấn đề với pin gốc (đầu phun với phần còn lại của sợi nhựa ở đầu có thể làm pin bị bật ra) vì vậy tôi đã làm pin mới từ thanh carbon.
Đối với thiết kế đó, tệp liên quan là Mellow_z_endstop_holder v2.0. Nhìn vào hình ảnh trong phần.
***
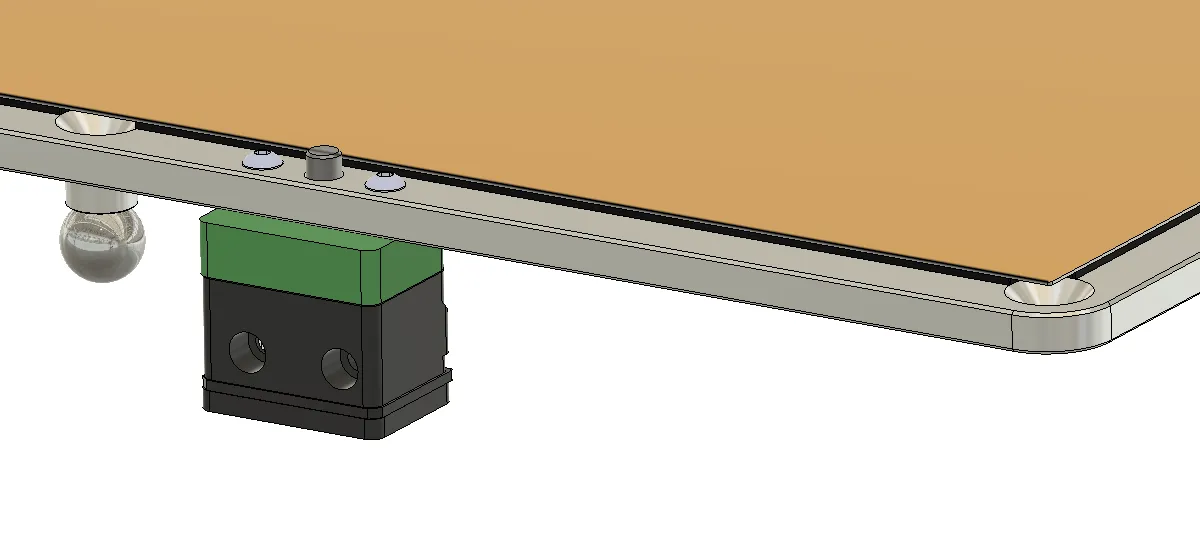
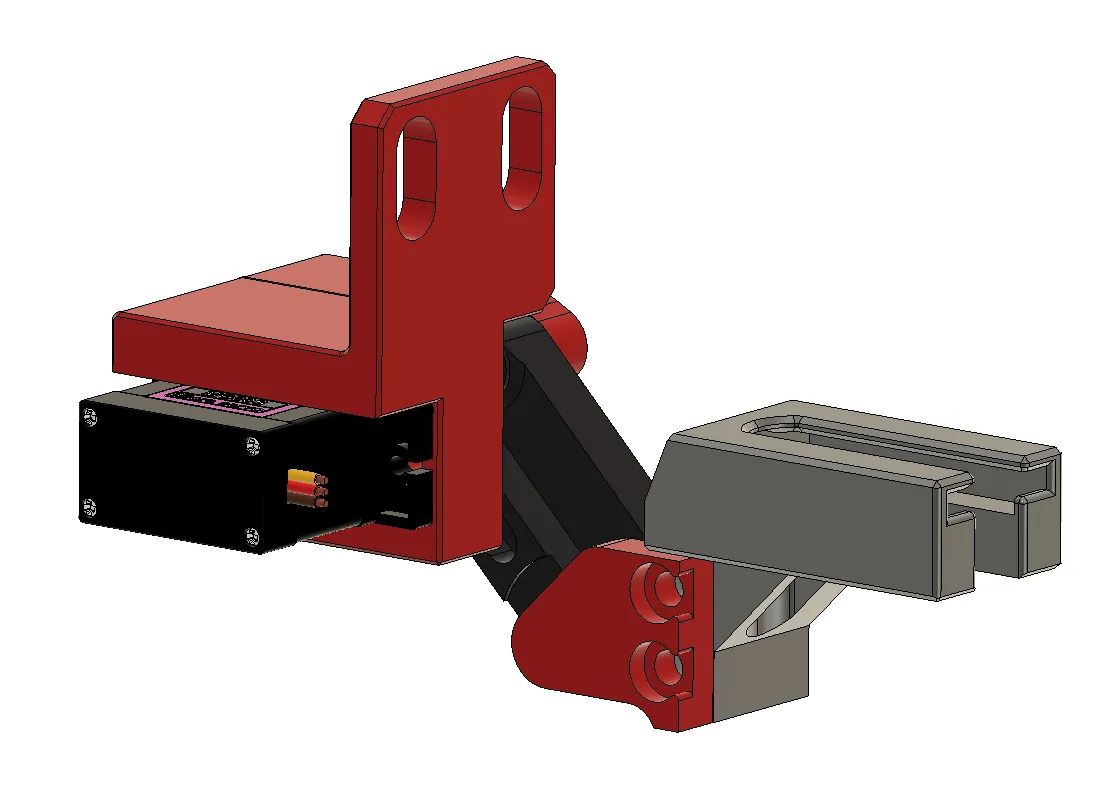
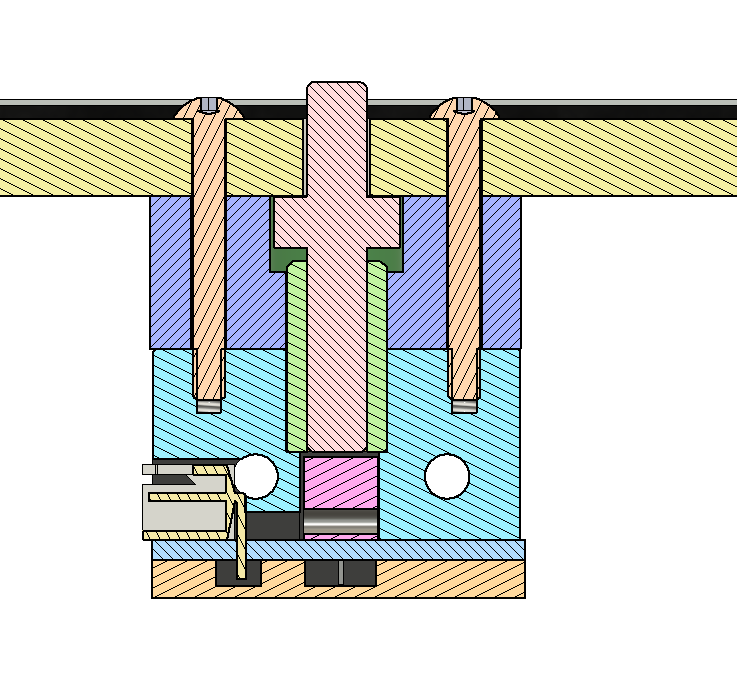
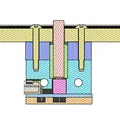
Một trong những giải pháp khả thi để xử lý việc hiệu chuẩn Z tự động trước mỗi lần in. Giải pháp được công bố bao gồm dock cảm biến Euclid Servo và khoảng cách dưới giường cho Mellow Z Endstop.
Mô hình đính kèm là các tệp Lắp ráp Fusion và tệp STEP cũng vậy.
Lưu ý: Dock Euclid gốc được chuẩn bị bởi BRS Engineering và cơ cấu động học đến từ thế giới Voron (thật không may, tôi không thể nhớ ai là người tạo ra nó). Tôi đã lấy chúng và điều chỉnh một chút. Tôi không thể đặt “Remix hoặc biến thể của mô hình khác” mà không có liên kết chính xác nên hãy bỏ qua lựa chọn “Tôi đã làm nó”.
Liên kết:
- Triển khai SW: https://github.com/protoloft/klipper_z_calibration#requirements
- Mellow Z Endstop https://www.aliexpress.com/item/1005004822732672.html?spm=a2g0o.order_list.order_list_main.10.3e871802r28Imp
- một số động cơ servo MG90S
Video từ hành động (thiết kế hơi cũ, nhưng nguyên tắc thì vẫn giống nhau):
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!