Mô hình Stargate với cơ chế quay glyphs và giá treo tường

Điều này là kết quả của công việc trước đây của tôi

















Mô tả
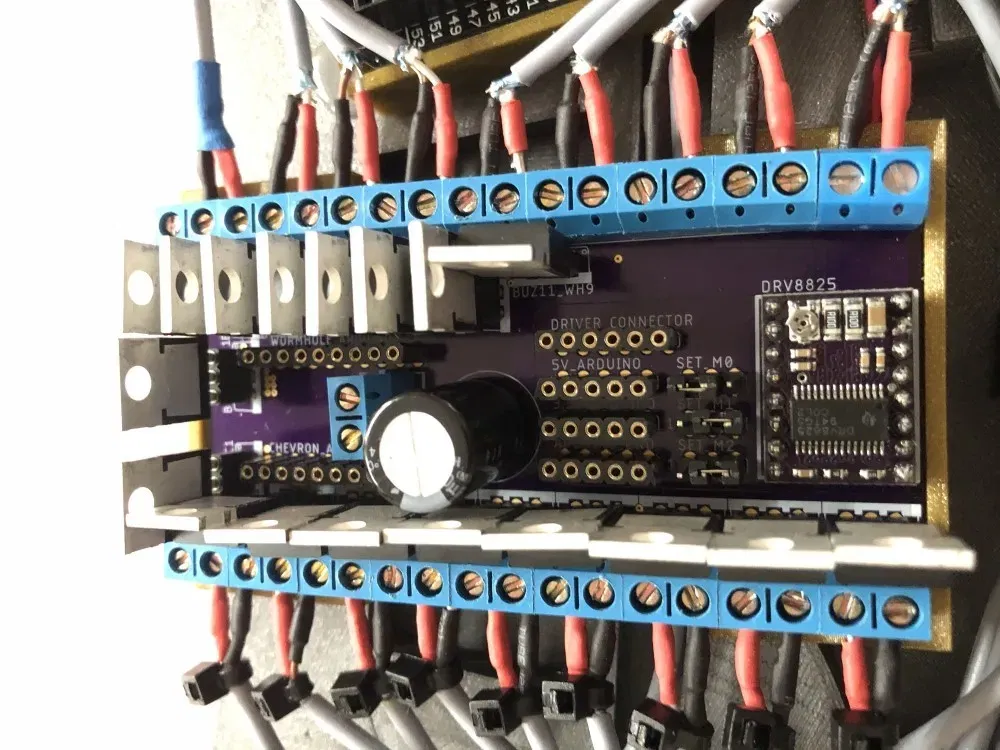
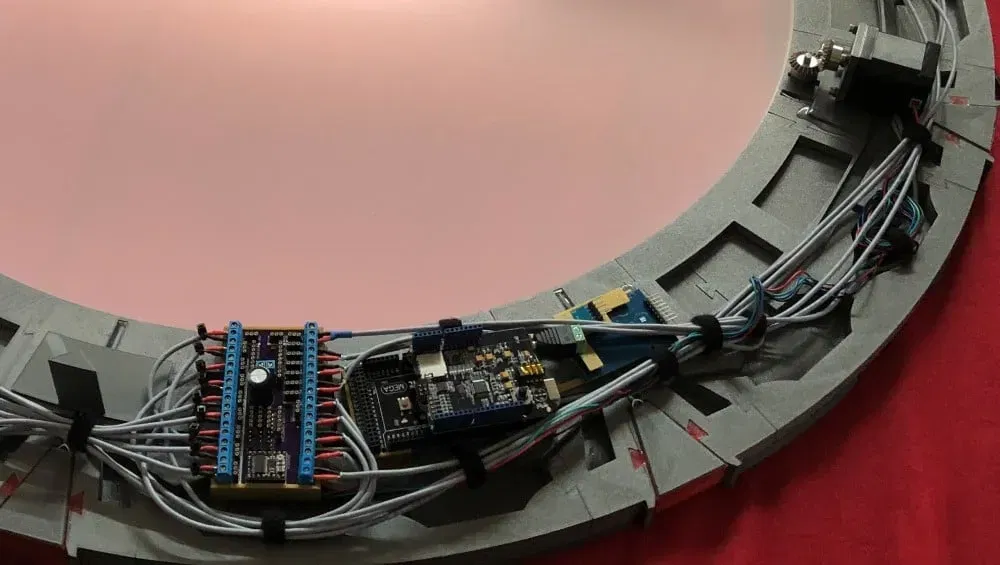
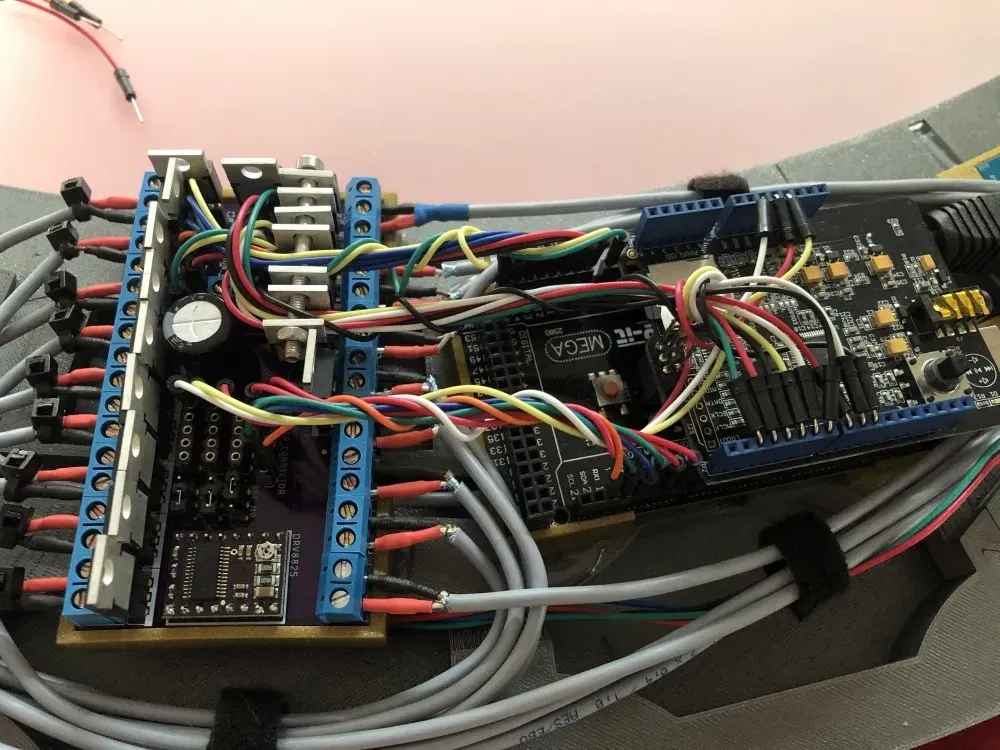
Điều này là kết quả của công việc trước đây của tôi ‚[Hướng dẫn khái niệm/Bản thiết kế] Stargate - Xoay ký hiệu bằng động cơ bước‘ (ID vật thể 4405616; chỉnh sửa để nhập vào printables.com: https://www.f3d.vn/3d-model/45769-cong-sao-5ft-co-dong-co-buoc-dieu-khien-glyph). Tôi đã có thể tạo ra một chương trình arduino, cho phép quay số địa chỉ cổng. Ba video đã được tải lên dưới dạng vật thể. Nếu bạn nhìn kỹ video ‚Stargate_Dial.mp4‘ (tôi biết chất lượng hình ảnh không được tốt lắm) bạn có thể thấy rằng địa chỉ đã quay số là ‚Atlantis‘. Hai video còn lại đang trình diễn các ví dụ. Xin lưu ý rằng tôi không chia sẻ mã của mình, vì nó phụ thuộc rất nhiều vào dây điện và cấu trúc Stargate. Ví dụ, tôi sử dụng một shield âm thanh, một đầu đọc NFC, (phần cứng la bàn đã bị vô hiệu hóa), động cơ bước (driver) & truyền động bánh răng, v.v. Tôi cũng sử dụng một số thư viện và tôi không muốn vi phạm bất kỳ bản quyền nào. Nếu bạn có câu hỏi cụ thể, vui lòng viết một bình luận và tôi sẽ cố gắng trả lời càng sớm càng tốt. Về nguyên tắc hoạt động: Thông qua giao tiếp nối tiếp, tôi gửi một chuỗi với địa chỉ đến arduino. Việc xoay bắt đầu với tốc độ động cơ bước rất thấp. Sau đó, nó sẽ được tăng lên cho đến khi đạt được tốc độ tối đa. Trong khi vòng ký hiệu đang xoay, chương trình cố gắng đọc các thẻ NFC bên trong vòng ký hiệu. Mỗi thẻ chứa dữ liệu duy nhất (ví dụ: số từ 01 đến 39 - chúng tôi có 39 ký hiệu). Dựa trên dữ liệu, tại một thời điểm nào đó, tốc độ động cơ bước sẽ được giảm. Lưu ý: Tôi sử dụng ký hiệu thứ ba trước khi đạt được ký hiệu mục tiêu. Trước đây tôi đã muốn sử dụng phần cứng la bàn để đo trường từ và sử dụng bộ điều khiển PID phần mềm để thiết lập tốc độ, nhưng cho đến bây giờ nó vẫn không hoạt động. Khi ký hiệu mục tiêu được đạt, âm thanh khóa được phát và đèn LED chevron tương ứng được bật. Điều này lặp lại nhiều lần như số ký hiệu được nêu trong chuỗi gửi. Khi tất cả các chevron đã được khóa, đèn LED lỗ sâu được bật và âm thanh thiết lập lỗ sâu được phát. Sau đó, các LED sẽ nhấp nháy (sáng lên và mờ đi) cho đến khi một lệnh chuỗi 'hủy' được gửi. ### Cài đặt in Thương hiệu máy in: Prusa Máy in: I3 MK3S Bệ in: Không Hỗ trợ: Có ### Sử dụng PIN/Timer Chú ý Sử dụng PWM yêu cầu các bộ đếm phần cứng mà cũng cần thiết cho ngắt bộ đếm thời gian. Tôi đã gặp một chút khó khăn để tìm một cấu hình có thể sử dụng PWM trên tất cả 9 khu vực/điểm Stargate. 'Stargate có đèn 5ft' gốc chỉ có 6 khu vực (xem hình ảnh của nó). Mô tả sau đây dành cho Arduino Mega. Cấu hình được cung cấp là thiết lập mà tôi đang sử dụng. Nó phụ thuộc vào PCB kết nối mà tôi đã phát triển, được hiển thị trong một số hình ảnh. Có thể sắp xếp lại ánh xạ PIN. Bộ đếm thời gian Arduino Mega Arduino Mega có 6 bộ đếm thời gian (0-5). - Bộ đếm thời gian 0 thiết lập PWM của các chân D4 & D13 với độ phân giải 8 bit
- Bộ đếm thời gian 1 thiết lập PWM của các chân D11 & D12 với độ phân giải 16 bit
- Bộ đếm thời gian 2 thiết lập PWM của các chân D9 & D10 với độ phân giải 8 bit
- Bộ đếm thời gian 3 thiết lập PWM của các chân D2, D3 & D5 với độ phân giải 16 bit
- Bộ đếm thời gian 4 thiết lập PWM của các chân D6, D7 & D8 với độ phân giải 16 bit
- Bộ đếm thời gian 5 thiết lập PWM của các chân D44, D45 & D46 với độ phân giải 16 bit Sử dụng PIN Chỉ có các LED wormhole được kết nối với các chân PWM. - WORMHOLE_LED_1 D3
- WORMHOLE_LED_2 D4
- WORMHOLE_LED_3 D5
- WORMHOLE_LED_4 D12
- WORMHOLE_LED_5 D11
- WORMHOLE_LED_6 D8
- WORMHOLE_LED_7 D7
- WORMHOLE_LED_8 D6
- WORMHOLE_LED_9 D2 Điều này dẫn đến một Bộ đếm thời gian 2 và 5 miễn phí. Động cơ bước Tôi không sử dụng thư viện động cơ bước, vì tôi không tìm thấy thư viện nào sử dụng ngắt bộ đếm thời gian để kích hoạt các bước. Do đó, tôi đã viết triển khai riêng của mình. Trong cấu hình của tôi, ngắt phải được kích hoạt 4000 lần mỗi giây (tạo ra 2000 bước - chuyển đổi giữa HIGH và LOW trên một chân để tạo ra một bước). Có thể tăng số lượng, điều này dẫn đến tốc độ quay vòng glyph cao hơn. Bởi vì động cơ bước cần một phạm vi giá trị rộng cho gia tốc từ 0 đến 2000 bước, bộ đếm 16 bit duy nhất còn lại được sử dụng (bộ đếm 5). Bạn sẽ tìm thấy nhiều mô tả hướng dẫn cách tính toán và thiết lập các thanh ghi cần thiết để tự thực hiện chức năng này. Bộ đếm 2 Bộ đếm miễn phí khác được sử dụng để tạo ra tín hiệu 50Hz. Tôi đã gặp vấn đề trong việc cấu hình nó một cách chính xác với độ phân giải 8 bit với các bộ chia tần số có thể. Để giải quyết điều này, tôi đã viết một bộ chia tần số bổ sung vào hàm ngắt được gọi (một chút thử nghiệm để tìm cấu hình cần thiết). Với tín hiệu 50Hz này, các chức năng khác nhau sẽ được kích hoạt: - tăng chu kỳ công suất PWM để làm sáng/tối đèn LED
- tăng/giảm số bước được thực hiện bởi động cơ bước
- đọc dữ liệu cảm biến (ví dụ: đọc mỗi lần thứ 10 của tín hiệu 50Hz để đọc dữ liệu NFC và các dữ liệu cảm biến khác) Danh mục: In 3D
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình



Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!