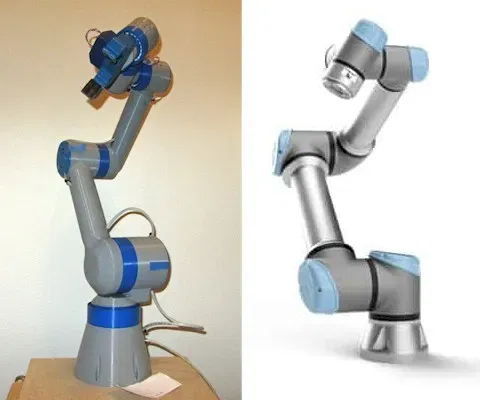
Cánh tay robot sáu trục WE-R2.4 với kích thước 80%

Cánh tay robot này (rất) được tạo kiểu gần như là phiên bản tỷ lệ 80% của robot công nghiệp UR3. Nó sử dụng cùng một thiết kế


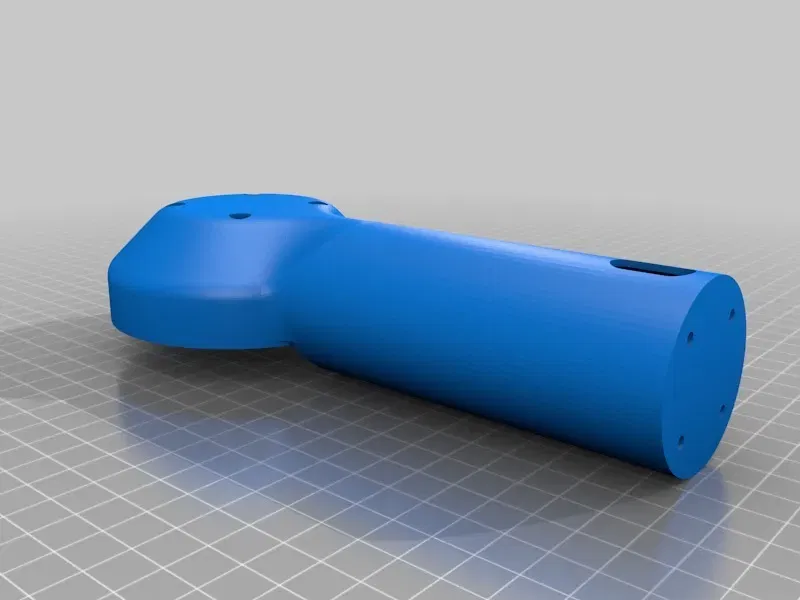












Mô tả
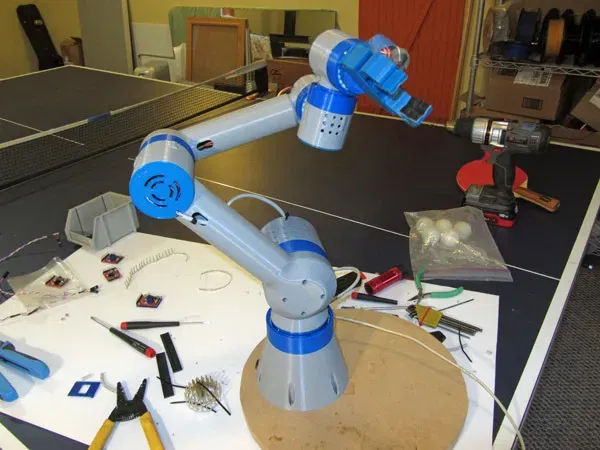
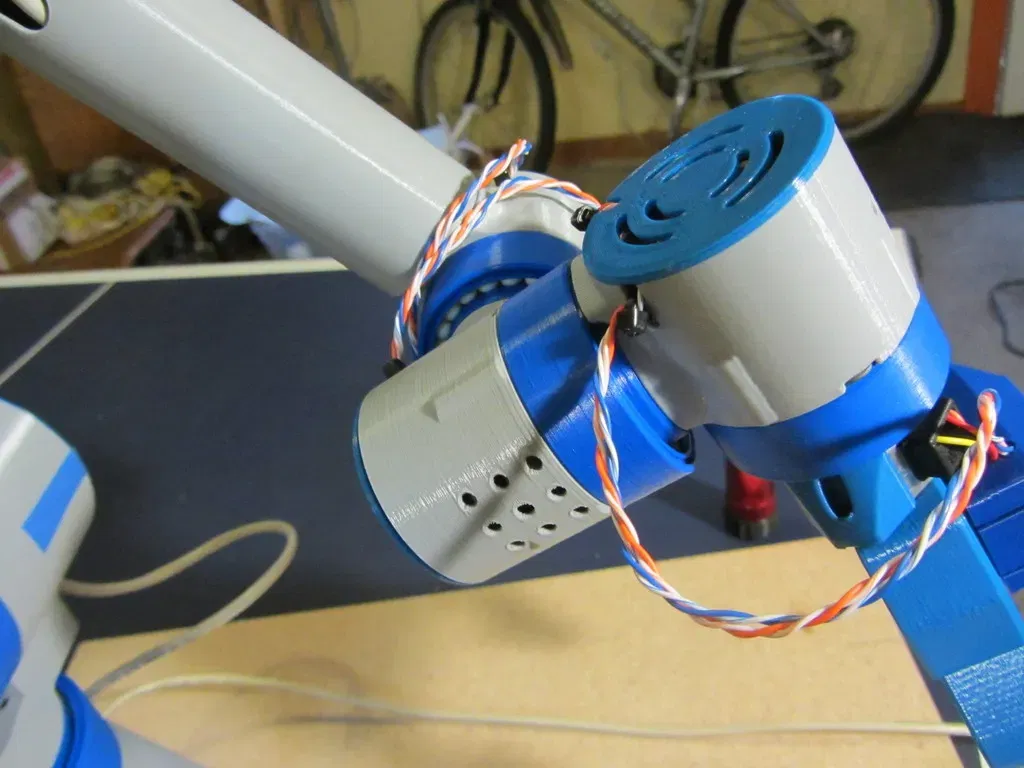
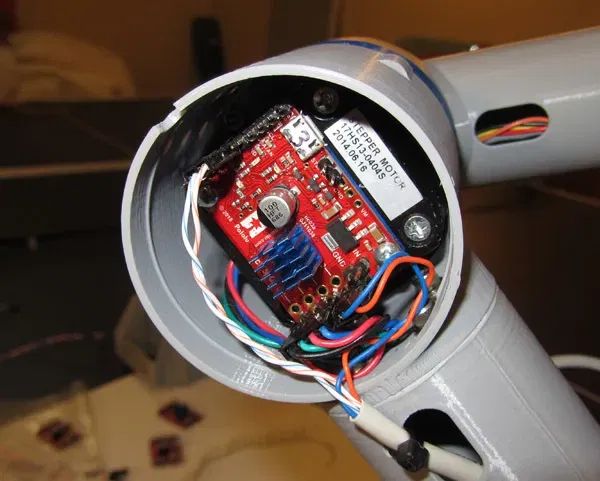
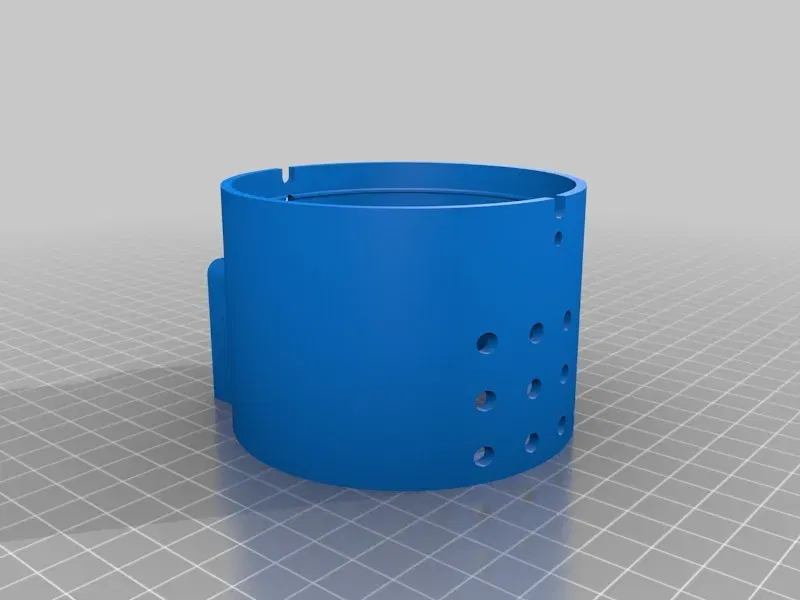
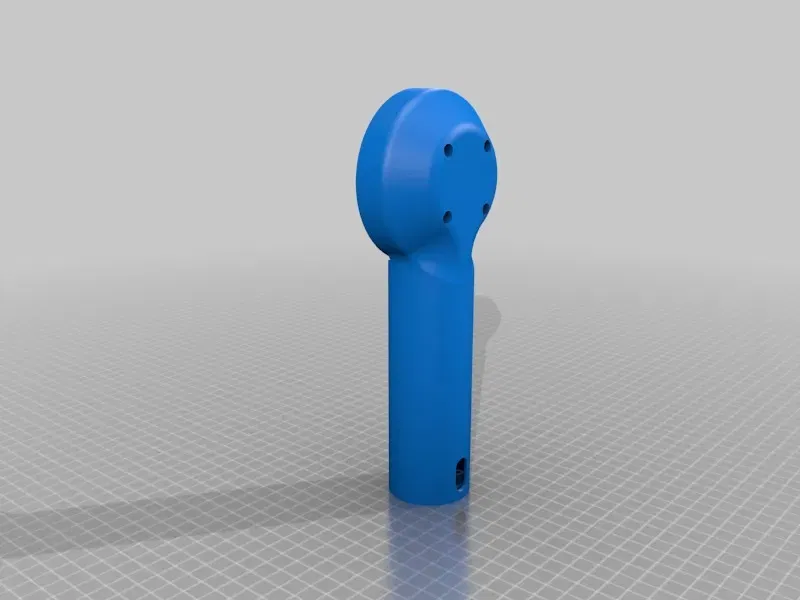
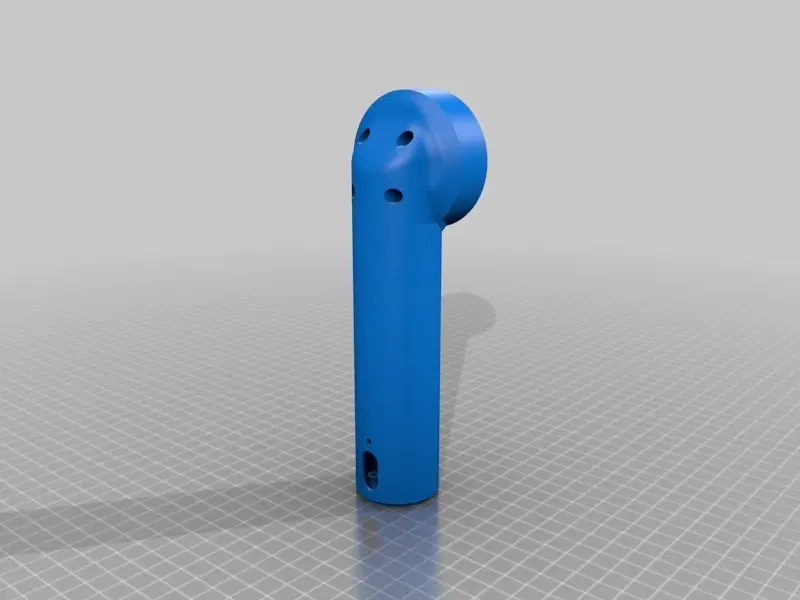
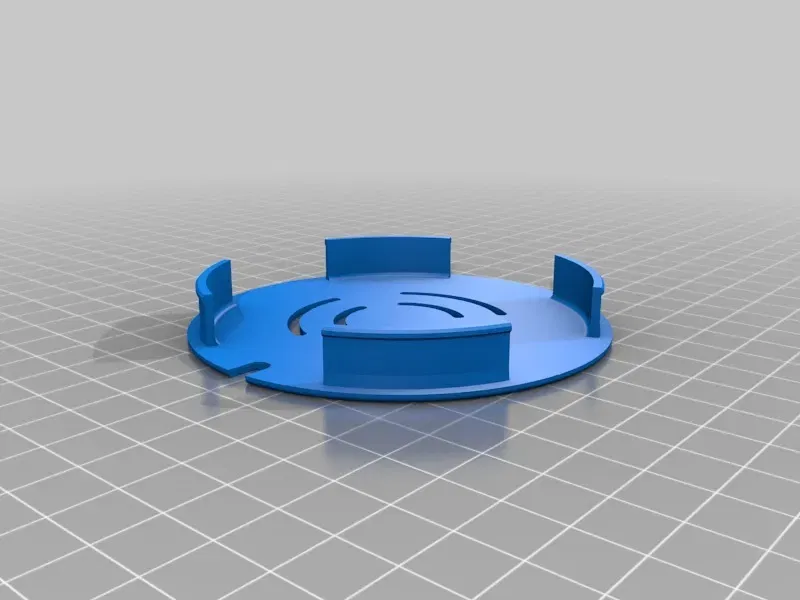
Cánh tay robot này được thiết kế (rất) đại khái như một phiên bản thu nhỏ 80% của robot công nghiệp UR3. Nó sử dụng cùng một triết lý thiết kế là đơn giản đặt một đơn vị động cơ/giảm tốc tại mỗi khớp, với sáu bộ điều khiển chồng lên nhau để tạo thành một cánh tay 6 trục. Bây giờ, trong khi UR3 sử dụng động cơ mô-men xoắn rỗng kết hợp với bộ truyền động hài ($$$) cho các bộ điều khiển, robot này sử dụng động cơ bước/động cơ hành tinh phức hợp mà tôi đã đăng ở đây: <>. Hai bộ điều khiển lớn được sử dụng cho hai khớp gốc đầu tiên, một bộ điều khiển có kích thước trung bình được sử dụng cho khớp khuỷu tay, và ba bộ điều khiển nhỏ được sử dụng cho các khớp cổ tay. Và bộ kẹp mà tôi đã đăng ở đây: <>. Đối với bộ điều khiển, tôi đã sử dụng bảy bộ điều khiển bước Tic T500 của Pololu với firmware tùy chỉnh mà tôi đã viết để hỗ trợ chuyển động phối hợp. Bạn có thể tìm thấy các chi tiết rối rắm, bao gồm một chương trình tiện ích thử nghiệm trên Windows, ở đây: https://drive.google.com/open?id=1rKRuWC4jAOekrds_WGUC7DkwlVsk2zdb Đây thực sự là một công việc đang trong quá trình phát triển và tôi sẽ bổ sung các thông tin còn thiếu khi có thời gian. Trong khi chờ đợi, xin vui lòng thoải mái đặt câu hỏi trong phần bình luận nếu bạn cần chi tiết mà tôi chưa đề cập đến. Vui lòng đọc qua tất cả tài liệu ở đây và hỏi tôi bất kỳ câu hỏi nào bạn có trước khi bắt đầu xây dựng cái này - đây không phải là một dự án dễ dàng trong cuối tuần!
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình













Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!