Robot Gripper - Mô hình tay kẹp robot cơ khí

Mô hình tay kẹp robot (Robot Gripper) được thiết kế làm vật trưng bày tĩnh. Sản phẩm thể hiện cấu trúc hình học co giãn độc đáo, cho phép mô phỏng chuyển động đóng mở của cơ cấu kẹp cơ khí thông qua hệ thống liên kết khớp nối tinh tế.
Mô tả
1. Lắp ráp phần đế và lõi trung tâm
-
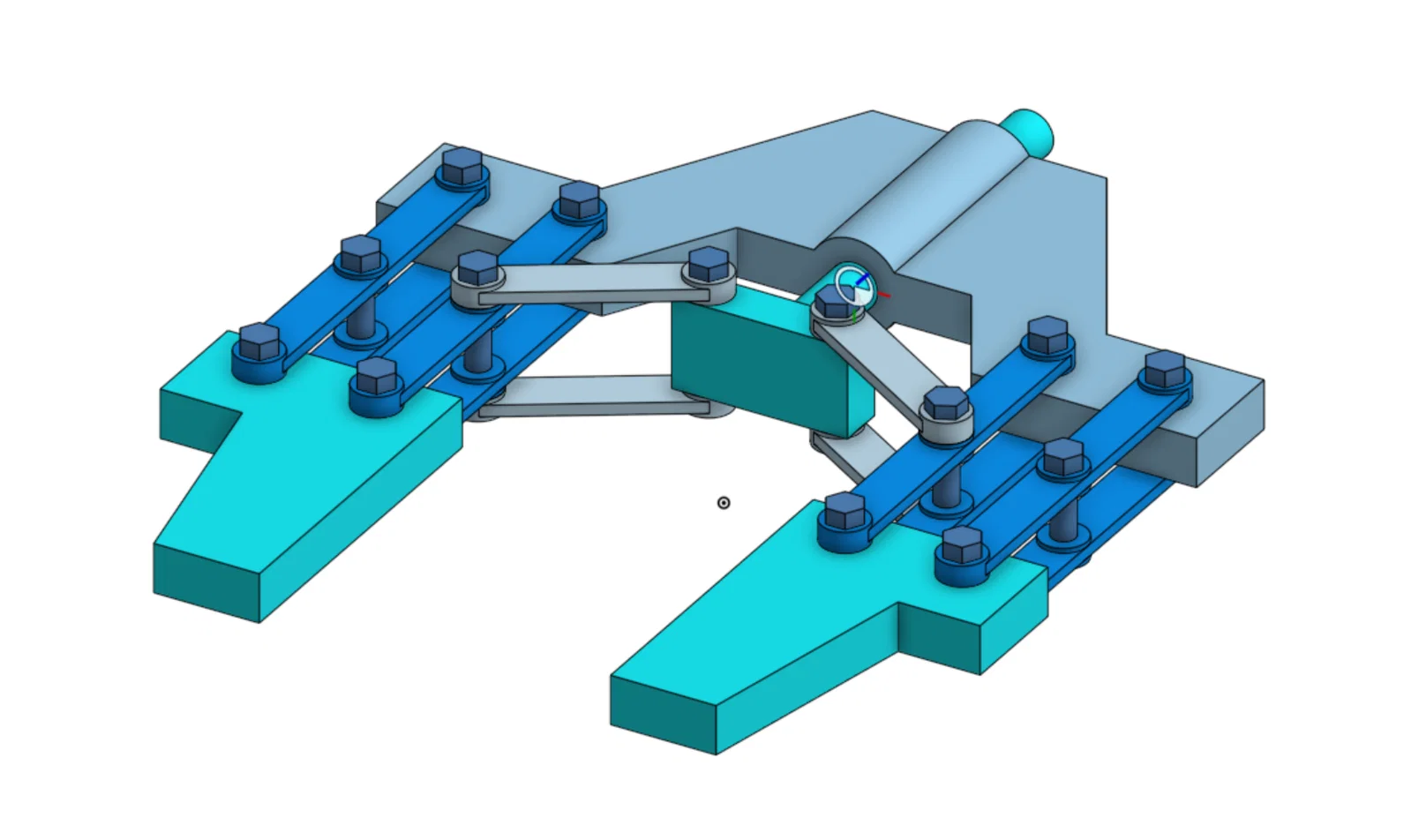
Căn chỉnh hai nửa khung chính (màu xám) sao cho các rãnh trung tâm hướng vào nhau.
-
Đặt cụm thanh trục màu xanh mòng két vào đúng rãnh trung tâm, đảm bảo khối hình chữ nhật nằm gọn bên trong khoang giữa.
2. Kết nối các thanh liên kết bên trong
-
Dùng các thanh liên kết ngắn màu xám để nối khối trung tâm màu xanh mòng két với các lỗ phía trong của khung chính.
-
Cố định các khớp xoay này bằng bu-lông.
3. Gắn các thanh liên kết bên ngoài
-
Đặt các tay đòn liên kết dài màu xanh dương ở mặt ngoài của khung chính.
-
Luồn bu-lông qua các đầu liên kết vào những lỗ phía ngoài của khung để tạo cơ chế chuyển động kiểu cắt kéo (scissor-action).
4. Gắn các ngàm kẹp (Gripper Jaws)
-
Đặt hai ngàm kẹp lớn hình chữ T màu xanh mòng két ở hai phía đối diện của cụm lắp ráp.
-
Căn chỉnh các đầu tự do của cả thanh liên kết màu xanh dương và xám vào các lỗ trên ngàm kẹp, sau đó chốt cố định chúng bằng số bu-lông còn lại.
5. Căn chỉnh cuối cùng
-
Kiểm tra xem tất cả 20 ốc/bu-lông đã được lắp đúng vị trí và bằng phẳng hay chưa.
-
Đảm bảo các kết nối vừa khít nhưng không bị quá chặt để toàn bộ cơ chế có thể co giãn một cách mượt mà.
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!