Compliant Gripper Larg XL: Kẹp gắp cơ khí 24cm cho in 3D

Khám phá ngay mẫu thiết kế Compliant Gripper Larg XL, một công cụ gắp cơ khí thông minh với chiều dài 24 cm, được thiết kế chuyên biệt để giúp bạn thao tác với các vật nhỏ ở vị trí khó tiếp cận một cách dễ dàng. Mẫu in 3D này tận dụng nguyên lý đàn hồi độc đáo, mang lại sự linh hoạt cao trong quá trình sử dụng. Để đạt được hiệu quả tốt nhất, người dùng cần đặc biệt lưu ý trong việc lựa chọn vật liệu in. Tránh sử dụng các loại nhựa quá dẻo để đảm bảo cơ chế không bị biến dạng và hoạt động ổn định. Đây là một dự án tuyệt vời cho những ai yêu thích các mô hình cơ khí ứng dụng cao, giúp tối ưu hóa công việc sắp xếp và cầm nắm linh kiện nhỏ trong không gian làm việc của mình.
Mô tả
Kẹp gắp cơ khí thông minh Compliant Gripper Larg XL
Bạn đang tìm kiếm một công cụ hỗ trợ cầm nắm các vật nhỏ hoặc ở những vị trí khó với tới? Mẫu thiết kế Compliant Gripper Larg XL này chính là giải pháp hữu hiệu dành cho bạn. Với chiều dài lên tới 24 cm, thiết bị này cho phép người dùng thao tác gắp đồ vật một cách linh hoạt mà không cần phải dùng tay trực tiếp. Đây là một mẫu kẹp gắp cơ khí dựa trên nguyên lý đàn hồi, được thiết kế tinh xảo để bạn có thể in 3D ngay tại nhà với những vật liệu thông dụng.
Thiết kế này đặc biệt hữu ích trong các tình huống cần sự chính xác hoặc khi bạn làm việc với các linh kiện nhỏ, khó cầm bằng ngón tay. Phần đầu kẹp được thiết kế mỏng nhưng vẫn đảm bảo độ chắc chắn để giữ chặt đồ vật. Cơ chế hoạt động dựa trên sự co giãn của vật liệu, giúp tay cầm trở nên nhẹ nhàng và dễ kiểm soát hơn. Tuy nhiên, vì là một thiết kế chịu lực đàn hồi, việc lựa chọn vật liệu in đóng vai trò quyết định đến độ bền và khả năng hoạt động trơn tru của sản phẩm.
Dưới đây là một số lưu ý quan trọng để bạn có được sản phẩm in ưng ý nhất:
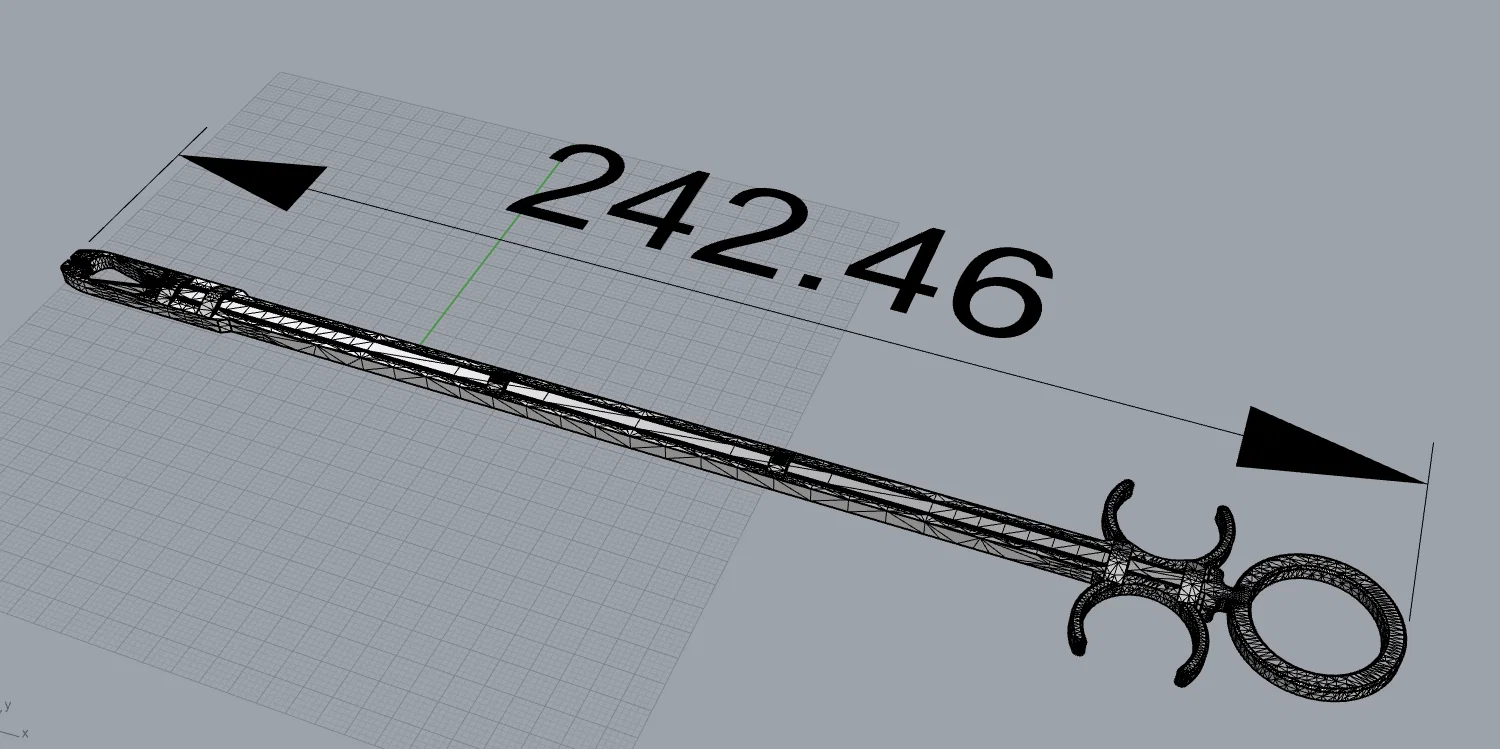
- Chiều dài tổng thể của mô hình là 242.46 mm, bạn cần đảm bảo bàn in của mình đủ rộng để chứa trọn vẹn thiết kế này.
- Tránh sử dụng các loại vật liệu quá dẻo hoặc đàn hồi cao. Những loại nhựa này có thể khiến cơ chế kẹp bị yếu, không đủ sức bung ra hoặc gây biến dạng thanh truyền lực trong quá trình sử dụng.
- Đối với nhựa PETG, bạn cần lưu ý rằng nó có thể không mở hết cỡ nếu độ dẻo quá cao, thậm chí thanh nén có thể bị biến dạng nhẹ. Bạn nên thử nghiệm với PLA hoặc các loại nhựa có độ cứng cao hơn.
- Thiết lập độ dày tường (wall count) và mật độ lấp đầy (infill) phù hợp để tăng cường độ bền cho các khớp nối quan trọng.
- Kiểm tra kỹ phần hỗ trợ (support) để đảm bảo không làm kẹt cơ chế chuyển động sau khi in xong.
- Hãy làm sạch các ba-via (bavia) kỹ lưỡng sau khi in để đảm bảo các bộ phận chuyển động được nhịp nhàng nhất có thể.
Nhìn chung, đây là một dự án thú vị để khám phá cơ học trong in 3D. Hy vọng bạn sẽ có những trải nghiệm tuyệt vời với công cụ tiện ích này trong công việc hằng ngày.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!