Máy kiểm tra bánh răng chóp với bánh răng tham số

Tôi cần một hệ thống thiết bị vát cho một dự án khác, vì vậy tôi đã tạo dự án này trong đó các bánh răng có thể được thay đổi theo tham số
Mô tả
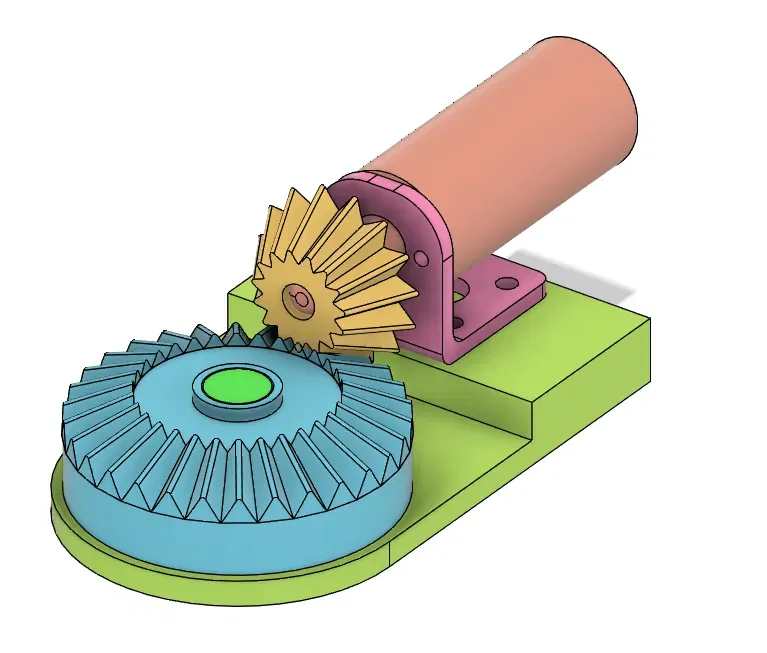
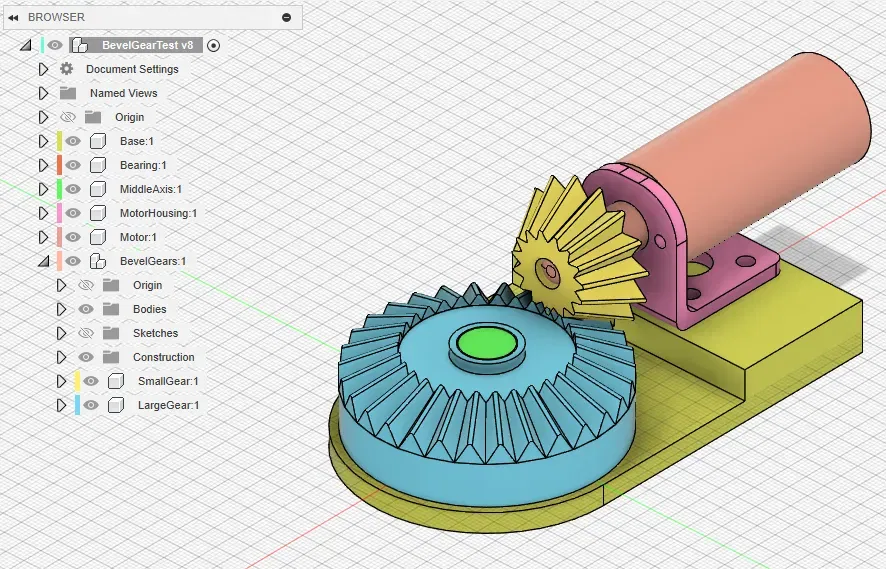
Tôi cần một hệ thống bánh răng chéo cho một dự án khác, và tôi đã cố gắng tìm kiếm các giải pháp có sẵn, nhưng tôi chỉ tìm thấy những cái mà các tệp được cung cấp dưới dạng STL, khiến chúng khó sửa đổi. Vì vậy, tôi quyết định thử sức thiết kế bánh răng của riêng mình, sử dụng hướng dẫn này:. Tôi đã thử nghiệm hệ thống với một động cơ DC Elecrow RPL13701K, cũng được mô hình hóa trong thiết kế cùng với vỏ của nó. Động cơ hoặc vị trí của nó thực sự không được kết nối với các bánh răng trong thiết kế, vì vậy khi thay đổi các tham số của bánh răng, động cơ sẽ không còn được đặt đúng vị trí nữa. Tôi đã tạo ra một số tham số rất thô để di chuyển động cơ vào vị trí sau khi thay đổi cài đặt bánh răng (MotorHeightAdjustment & MotorDepthAdjustment). Ngoài ra, bánh răng lớn hơn được thiết kế để có một ổ bi bên trong. Ổ bi cũng được bao gồm trong thiết kế, vì vậy bạn có thể thay đổi kích thước của nó để phù hợp với một ổ bi mà bạn sẽ sử dụng (hoặc thay vào đó chỉ cần lấp đầy không gian này để không sử dụng ổ bi). Các tham số (một số thuật ngữ có thể không chính xác, tôi rất mới với cơ khí):
- Module - giống nhau cho cả hai bánh răng
- LargeGearTeethCount
- SmallGearTeethCount
- Backlash - điều này thực sự chỉ là độ lùi không khoa học của riêng tôi, cố gắng thêm một chút biên độ sai số khi in các bánh răng. - LargeGearPCD - Đường kính Pitch được suy ra từ các giá trị trên
- SmallGearPCD - Đường kính Pitch được suy ra từ các giá trị trên
- TeethDepth - độ sâu của các răng chạy từ đường kính pitch hướng về trung tâm của vòng tròn
Giấy phép

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!
Chưa có bình luận nào. Hãy là người đầu tiên!