Chicken Door Automation for Omlet (Hệ thống cửa tự động cho chuồng gà Omlet)

Dự án tự động hóa cửa chuồng gà Omlet Eglu Cube và Go bằng ESP8266. Hệ thống tích hợp REST API, hỗ trợ đóng/mở cửa tự động theo lịch trình hoặc điều khiển từ xa, tích hợp đèn dẫn dụ và cảm biến an toàn, giúp quản lý chuồng gà dễ dàng hơn.












Mô tả
Cảm ơn bạn đã ủng hộ mình!
Đây là một mẫu in 3D miễn phí khác mình dành tặng mọi người. Mình rất thích chia sẻ các thiết kế của mình, nhưng việc thiết kế, thử nghiệm, tinh chỉnh, đăng tải và bảo trì tốn rất nhiều công sức. Nếu bạn thấy mẫu này hữu ích, hãy cân nhắc ủng hộ một khoản Donation nhỏ hoặc Mua cho mình một ly cà phê. Cảm ơn bạn!
Thiết kế
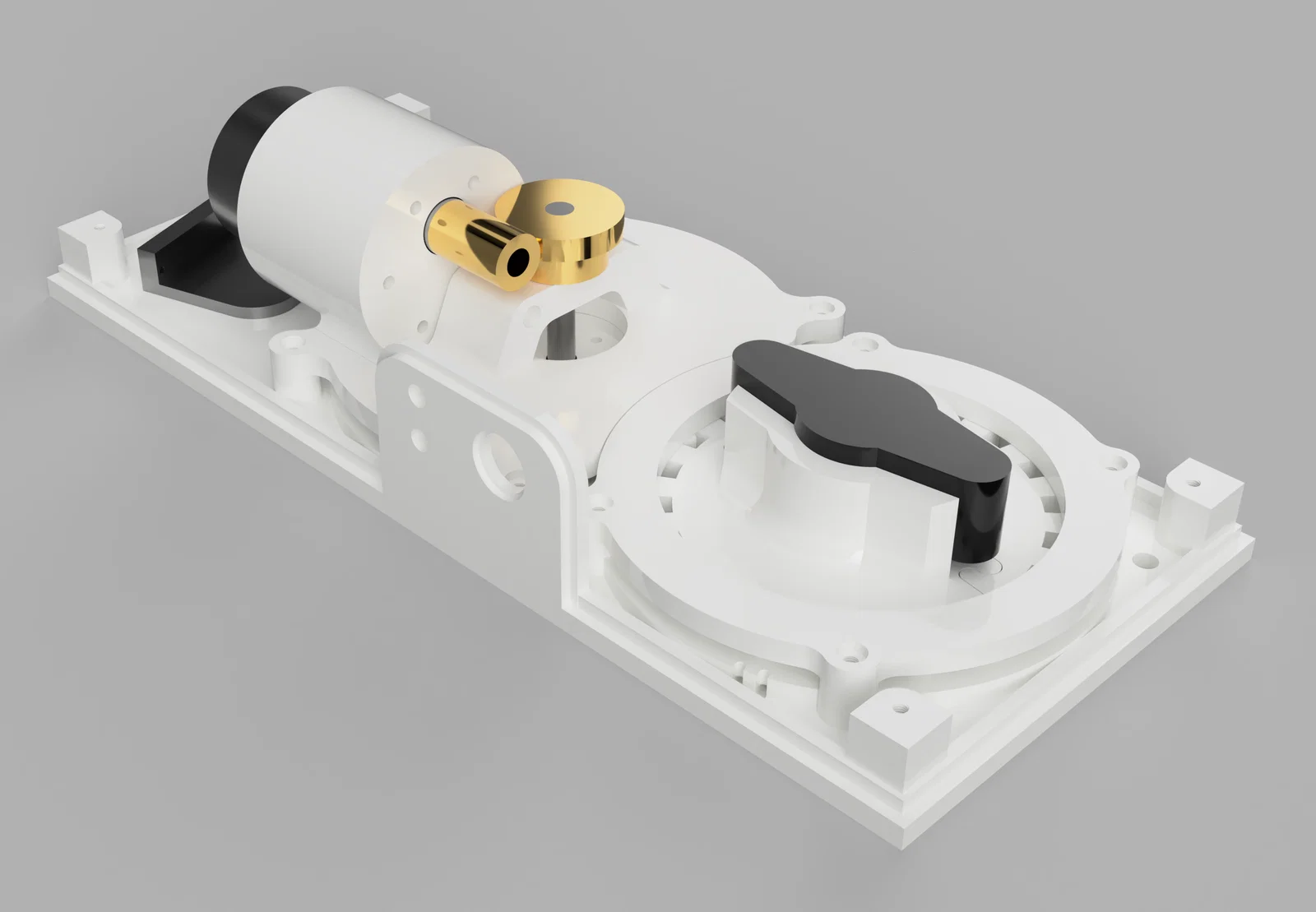
Đây là hệ thống tự động hóa cửa chuồng gà được thiết kế cho hai chuồng Eglu Cube và một chuồng Eglu Go của mình. Hệ thống vận hành bằng vi xử lý ESP8266 tích hợp RESTless API, giúp dễ dàng kết nối vào hệ thống nhà thông minh. Video bên dưới (và một số hình ảnh) cho thấy phiên bản động cơ cũ, hiện đã được thay thế bằng loại động cơ giảm tốc (worm gear motor) kín.
Tính năng:
- Có thể lắp đặt (gần như) không cần sửa đổi chuồng gà
- Điều khiển động cơ đóng/mở cửa
- Điều khiển đèn để dẫn dụ gà vào chuồng
- Hỗ trợ nhiều lệnh qua RESTfull API:
- Trạng thái cửa
- Mở cửa
- Đóng cửa
- Trạng thái đèn
- Bật đèn
- Tắt đèn
- Nút bấm đóng/mở cửa thủ công
- Hiển thị trạng thái cửa qua hai đèn LED
Cách mình sử dụng:
Cửa tự động mở vào lúc mặt trời mọc hoặc 7 giờ sáng – tùy thời điểm nào đến sau. Đèn được bật khi mặt trời lặn. Việc đóng cửa được thực hiện từ xa qua điều khiển thủ công. Lý do là vì lũ gà nhà mình chưa học được cách tự vào chuồng hoàn toàn. Để tránh làm kẹt gà, mình theo dõi qua camera IP và đóng cửa từ xa bằng cách gửi lệnh HTTP (tích hợp vào hệ thống nhà thông minh). Khi cửa đóng, đèn sẽ tự động tắt.
Cải tiến có thể thực hiện:
- Phát hiện khi gà bị kẹt trong cửa đang đóng và tự mở lại
- Thêm gioăng cao su
- Bảo vệ hệ thống khỏi tự phá hủy
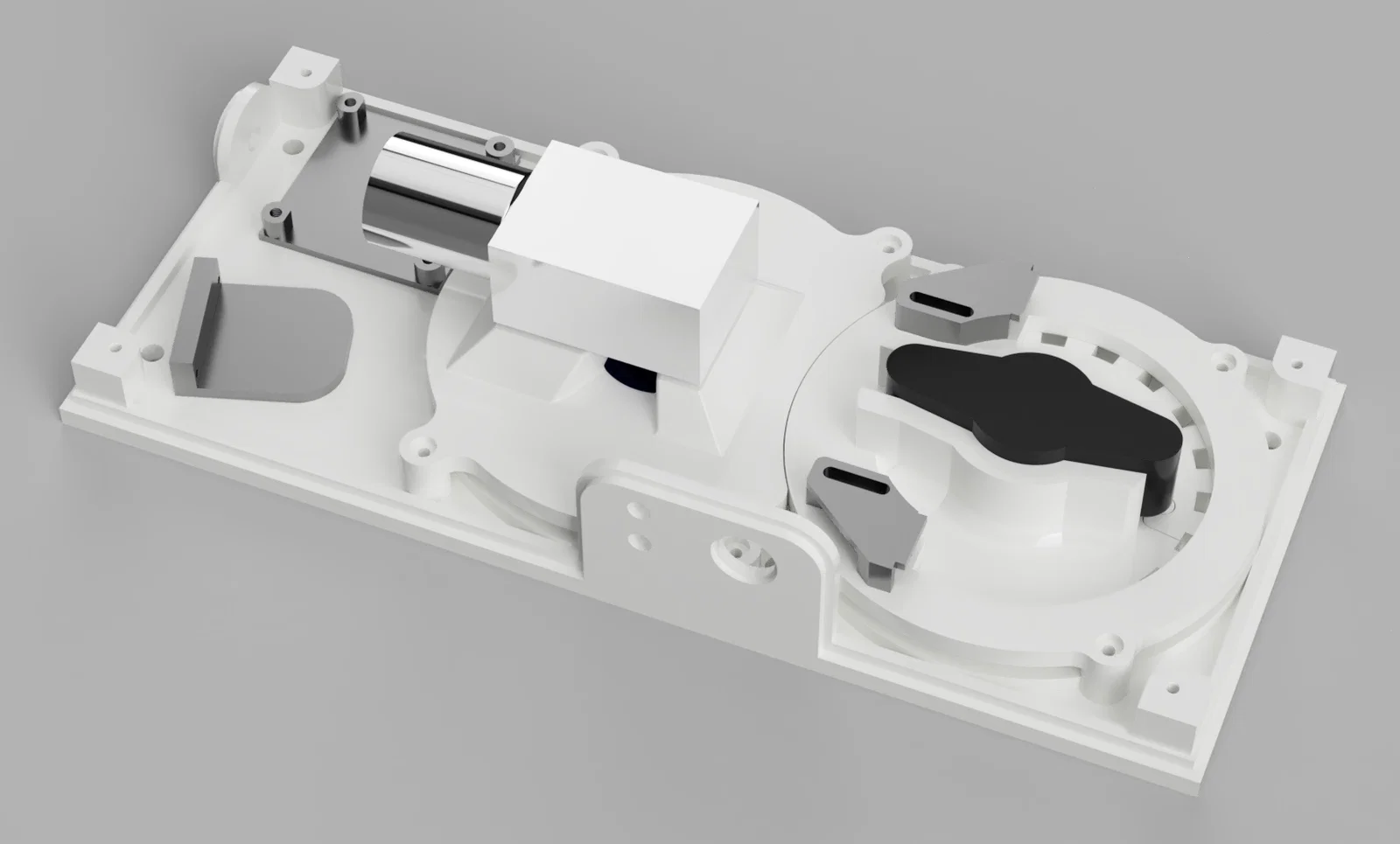
In ấn:
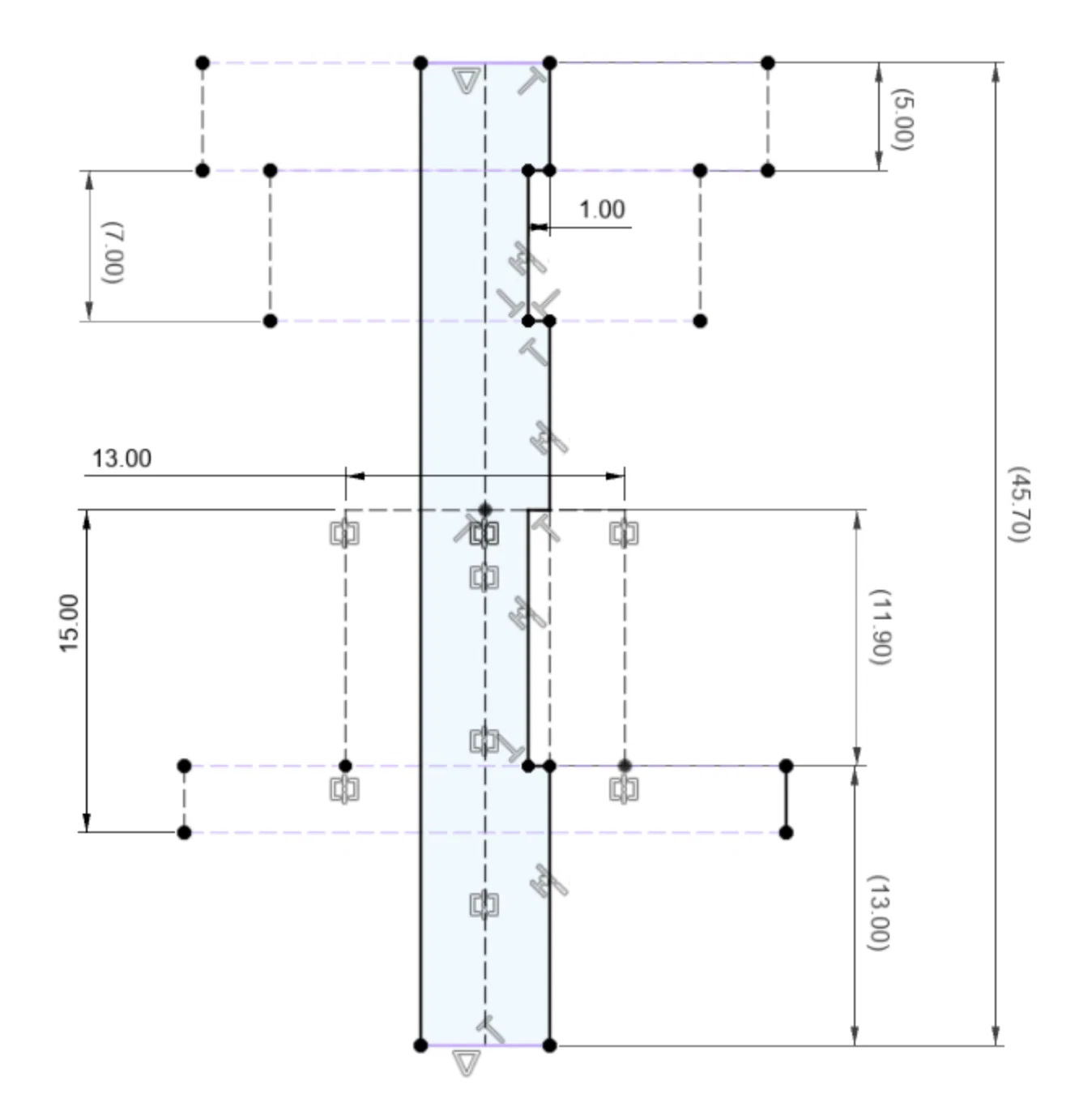
Sử dụng vòi phun 0.4mm, chiều cao lớp 0.2mm và nhựa PETG. Hầu hết các bộ phận không cần support và có thể in theo hướng mặc định. Các phần BaseTopMotor và Lid cần “support on built plate only”. MotorMount cần xoay 90 độ ở đầu đóng (đầu có lỗ bắt vít) và cũng cần “support on built plate only”.
Ban đầu, mình dùng mẫu nắp Lid.stl bo tròn, nhưng rất khó in (cần quá nhiều support khi in theo hướng đó hoặc bị xấu khi in ngược), nên đã thay bằng phiên bản vát cạnh (chamfer) để cải thiện chất lượng và tốc độ in.
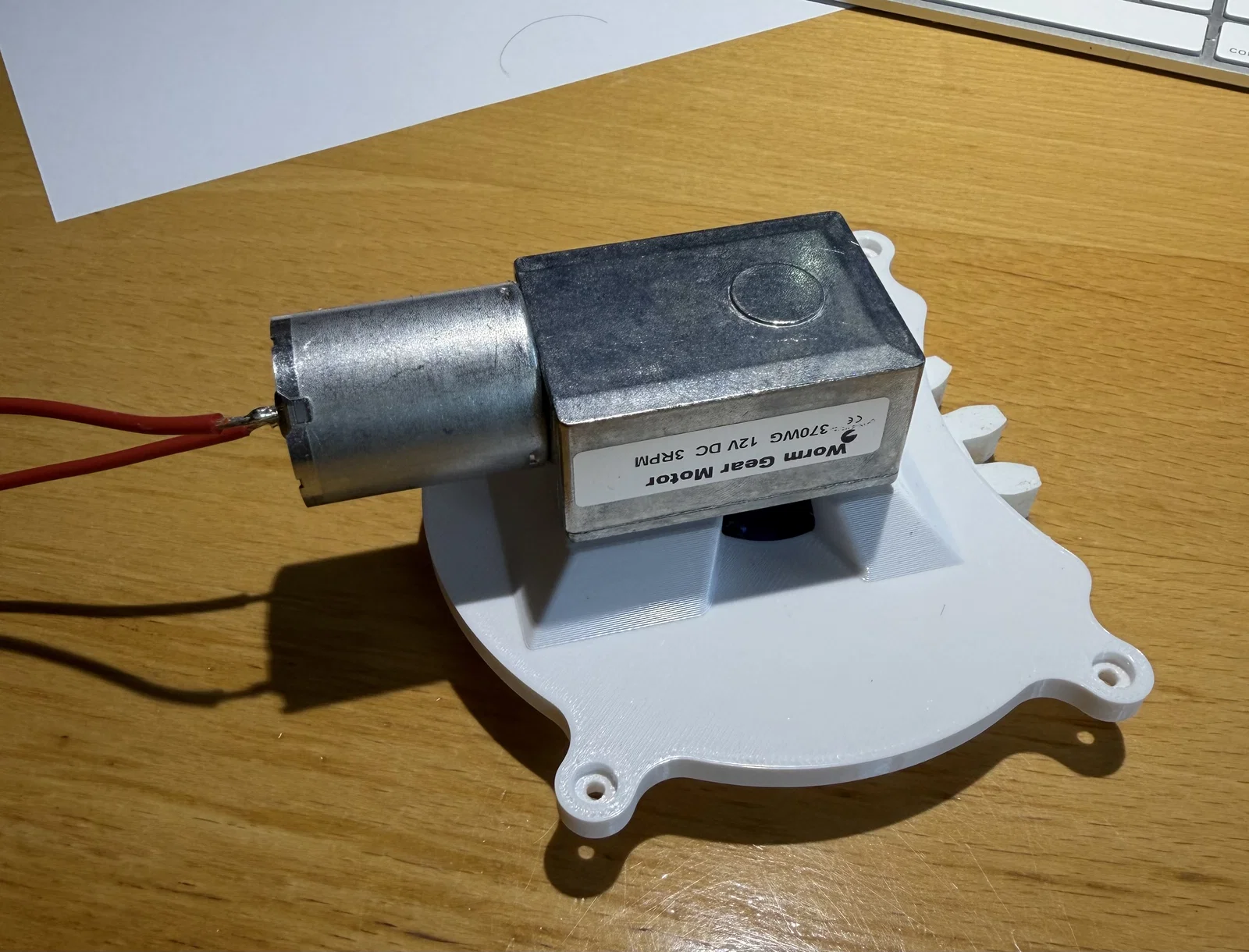
Cập nhật Động cơ và Bánh răng:
Phiên bản đầu tiên sử dụng động cơ bánh răng rất mạnh cùng trục vít đồng hở. Dù rất khỏe, nhưng bộ trục vít đồng bị mất ma sát theo thời gian và gây ra nhiều vấn đề. Bản cập nhật này thay thế bằng động cơ nhỏ gọn hơn. Mình vẫn giữ các thiết kế 3D cũ trong danh sách dưới, nhưng đặc biệt khuyến khích các bạn dùng giải pháp mới này.
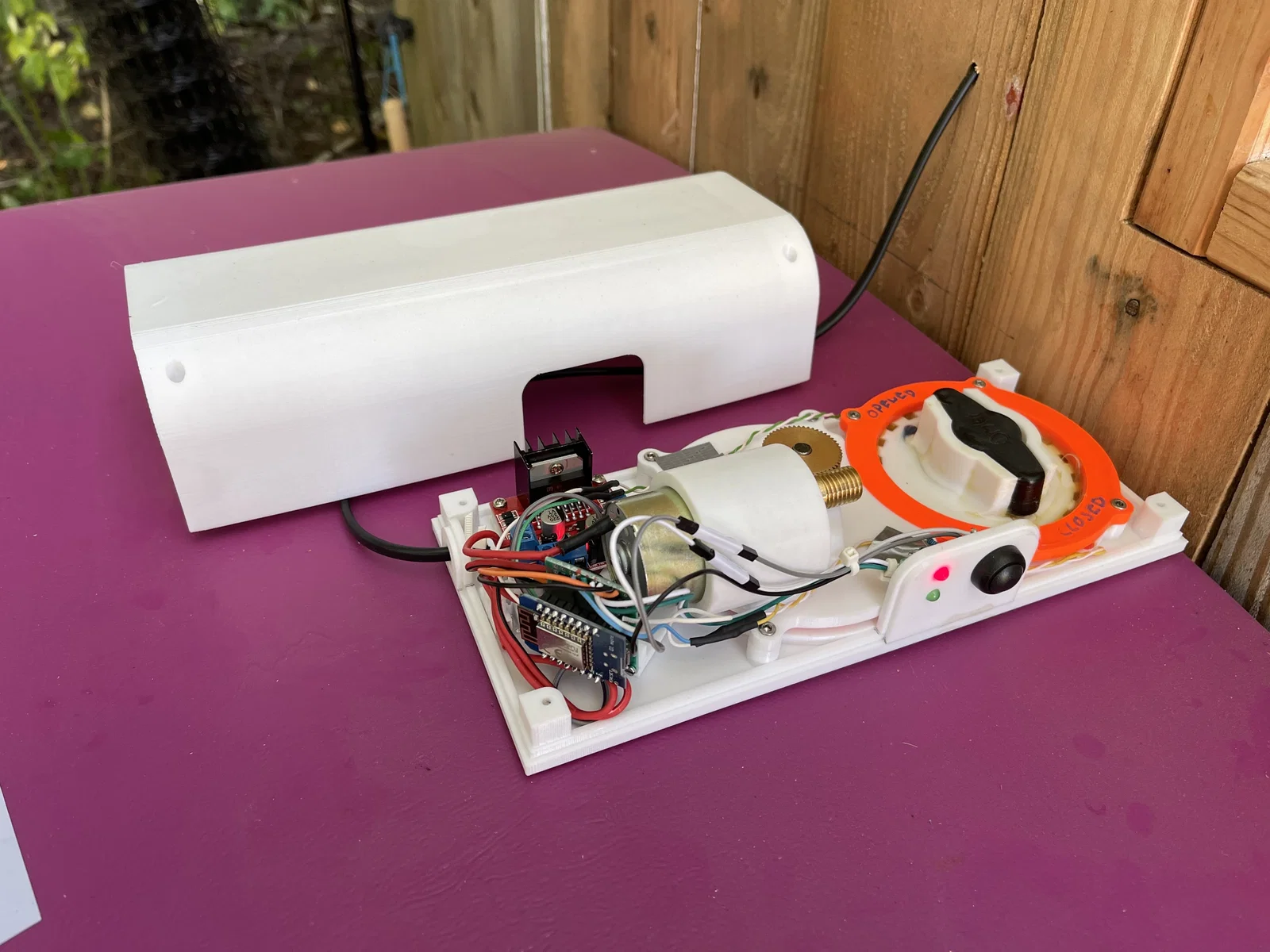
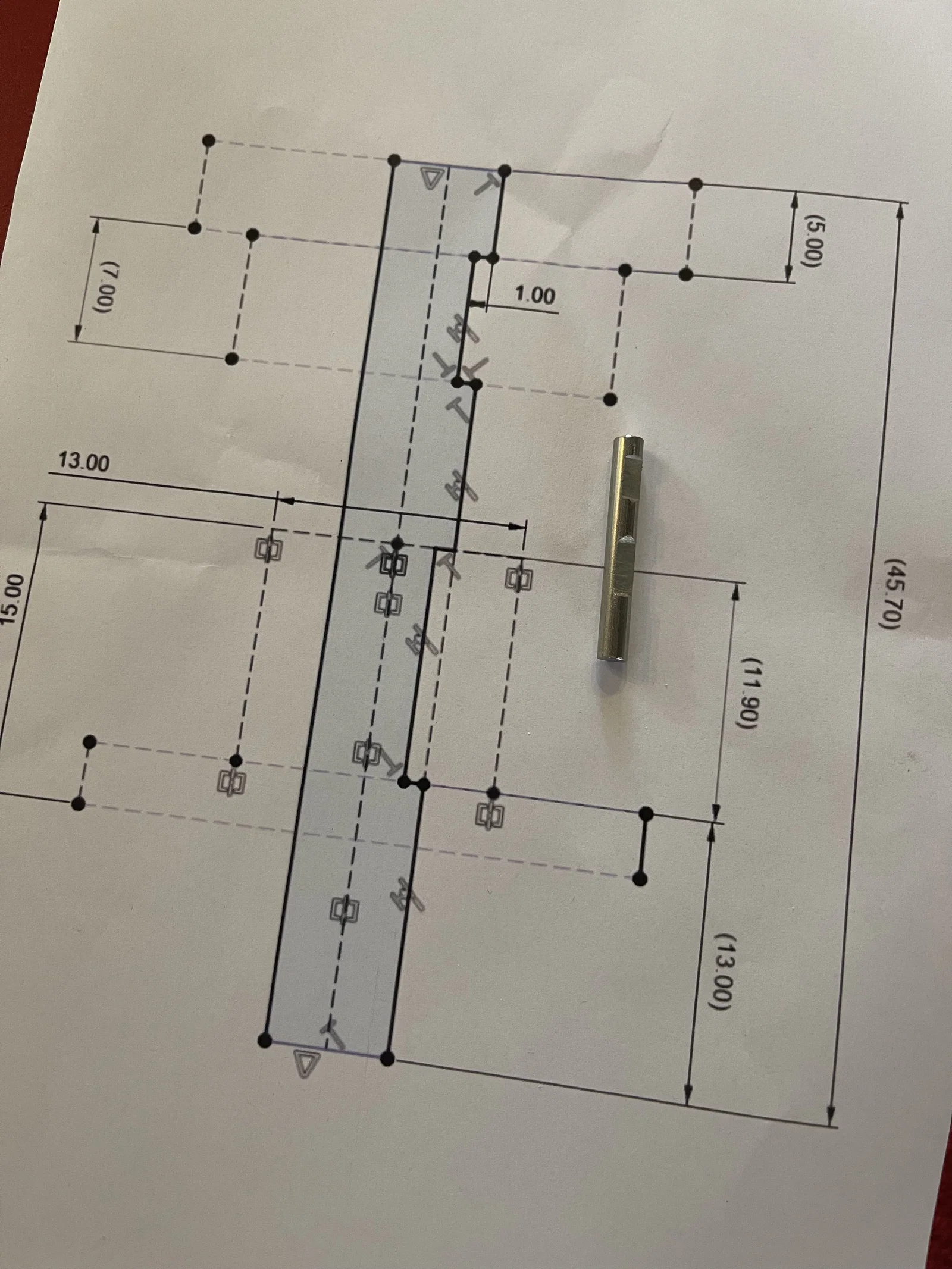
Linh kiện cần thiết (xem ảnh trên bàn đỏ):
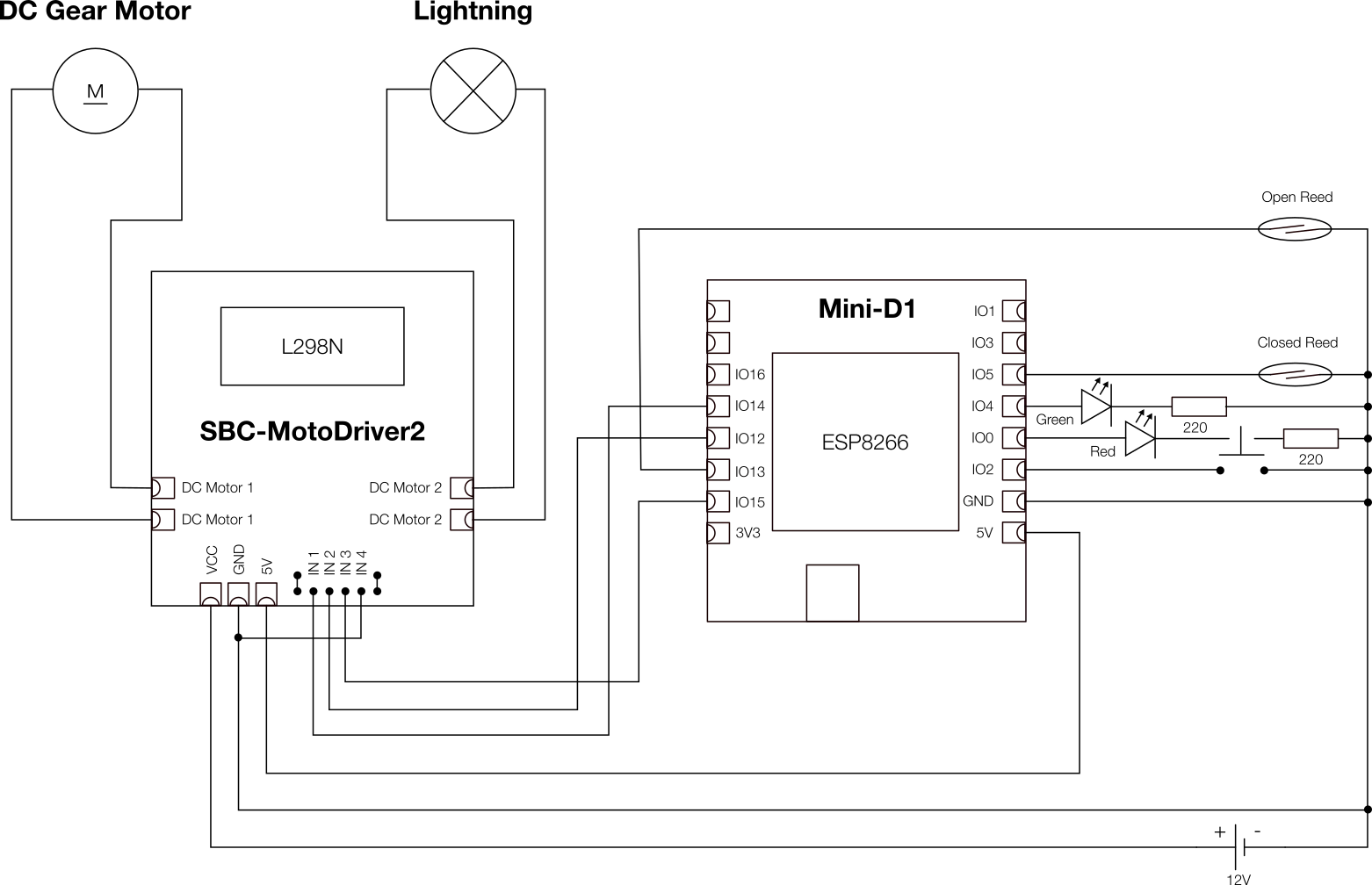
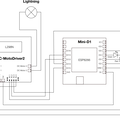
- ESP8266 D1 Mini
- Đèn LED đỏ và xanh, kèm 2 điện trở (330 Ohm)
- Nút bấm vận hành thủ công (cho lỗ 12mm)
- Biến áp 230V / 12V DC
- Động cơ giảm tốc 12V DC 3rpm
- Module điều khiển động cơ L298 N H Bridge DC
- Khớp nối mặt bích 6mm
- Đèn LED 12V (1W hoặc nhỏ hơn)
- 2 công tắc từ (reed contact), 1 nam châm
- hoặc 2 công tắc hành trình (micro switch) kèm ốc M3 dài 12mm
- Các linh kiện điện tử nhỏ và dây dẫn thông dụng
- Ốc M3 dài 8mm, 10mm, 20mm
- Keo dán 2 thành phần
- Mỡ bôi trơn
Hướng dẫn lắp đặt:
(Lược bỏ các bước lắp ráp chi tiết để đảm bảo độ dài)
Cân chỉnh và Lắp vào chuồng gà:
Vui lòng đọc kỹ phần này. Hệ thống có thể tự làm hỏng nếu bạn không thực hiện đúng hướng dẫn. Sau khi lắp xong, hãy thử nghiệm thực tế, kiểm tra chiều quay của tay cầm Eglu và điều chỉnh các thông số CLOSE_RUNOVER_MILLIS và OPEN_RUNOVER_MILLIS trong code để hệ thống hoạt động chính xác nhất.
Giấy phép

File mô hình














Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!