Nâng cấp: Bộ giảm chấn tích hợp tán M5 và tính năng đa vật liệu

Hướng dẫn chi tiết cách in bộ giảm chấn thay thế cho robot cắt cỏ với kỹ thuật chèn tán M5 và kết hợp nhựa PETG cùng TPU. Dự án sử dụng tính năng đa vật liệu để tăng độ bền và độ chính xác cho linh kiện robot Gardena R40Li.
27
Lượt Xem
0
Lượt Thích
0
Lượt Tải
Cập Nhật May 31, 2026













Mô tả
Việc chế tạo bộ giảm chấn được thực hiện qua 2 bước:
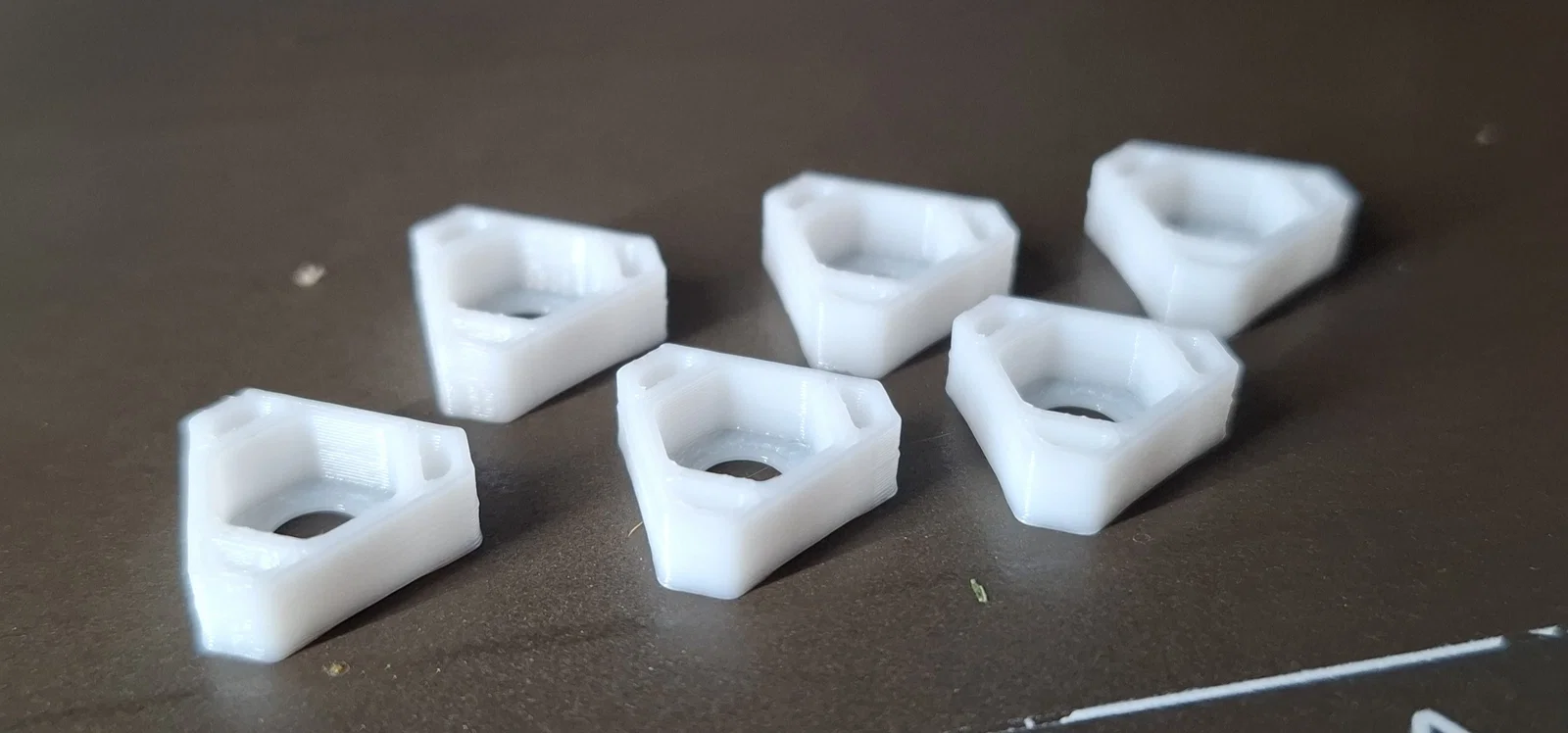
1.) In phần lõi PETG (cần 2 cái cho mỗi bộ giảm chấn)
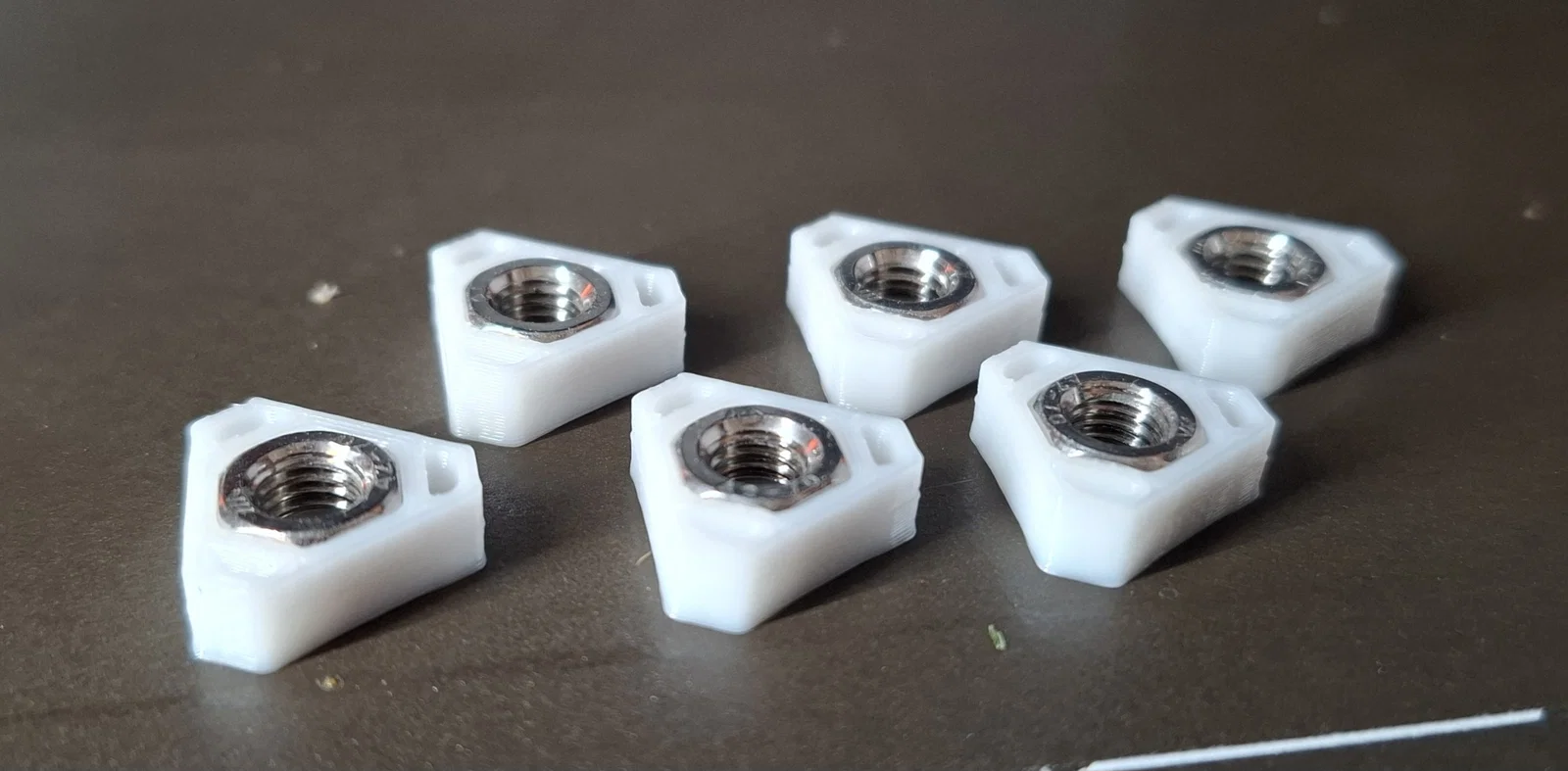
- Tạm dừng in trước lớp phủ (top layer) đầu tiên.
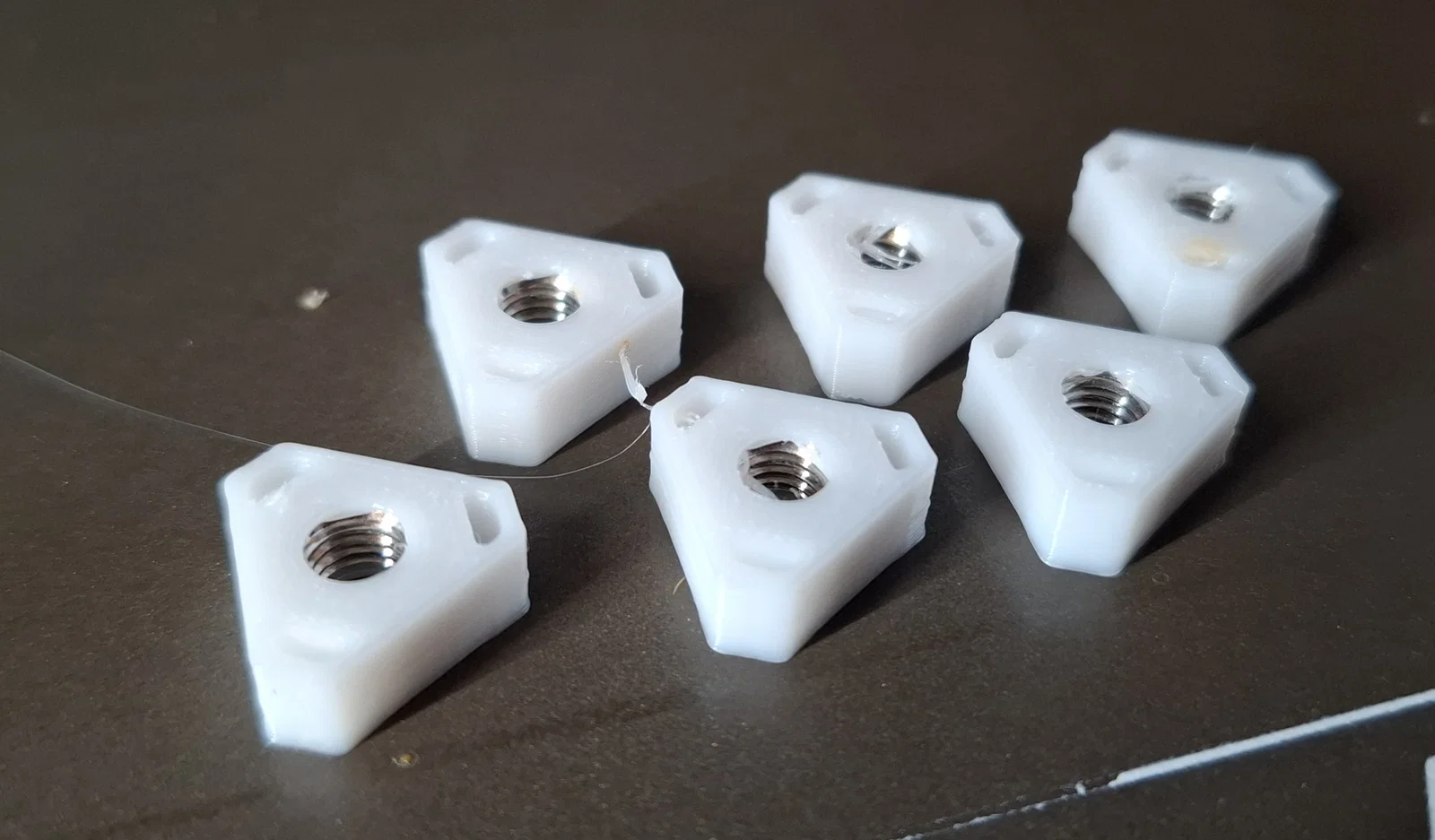
- Đặt một con tán M5 vào.
- Tiếp tục in lớp phủ để hoàn thiện lõi.
- In bộ giảm chấn bằng chất liệu TPU.
-
File STL có 3 phần: 1 thân chính và 2 phần "Cutout". Các phần Cutout này là các khối âm bản, kích thước lớn hơn một chút so với lõi PETG.
-
Tạm dừng in 2 lần, mỗi lần ngay trước lớp phủ đầu tiên ở phía dưới và phía trên.
- Mẹo: Thay vì chỉ tạm dừng, hãy chọn "change filament" để tránh tình trạng thiếu nhựa (under-extrusion) ở lớp tiếp theo do nhựa TPU bị chảy ra trong lúc tạm dừng.
-
Đặt lõi PETG vào và tiếp tục in.
- Mẹo: Khi phần trên bắt đầu in, sẽ có một trụ đỡ giúp thanh chặn không bị cong, đảm bảo độ chính xác cho phần lõi phía trên.
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...



Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!