Giá đỡ Spark Max cho module MK4i Swerve - Thiết kế tối ưu cho robot FRC

Bạn đang tìm kiếm giải pháp lắp đặt Spark Max cho hệ thống MK4i Swerve? Mẫu giá đỡ 3D này chính là thứ bạn cần. Được cải tiến từ thiết kế gốc với phần đáy kéo dài giúp tăng độ cứng cáp, phụ kiện này giúp cố định bộ điều khiển động cơ một cách chắc chắn trên khung chassis robot FRC. Thiết kế tập trung vào sự bền bỉ, dễ lắp đặt và tối ưu hóa không gian. Phù hợp cho các đội thi đấu cần sự ổn định và gọn gàng cho hệ thống dây dẫn phức tạp. Bạn có thể in bằng PETG hoặc ABS để chịu lực tốt nhất, với lưu ý về hướng in nghiêng để tăng cường liên kết lớp nhựa, đảm bảo robot hoạt động ổn định trong mọi điều kiện thi đấu khắc nghiệt.


Mô tả
Giá đỡ Spark Max cho cụm MK4i Swerve
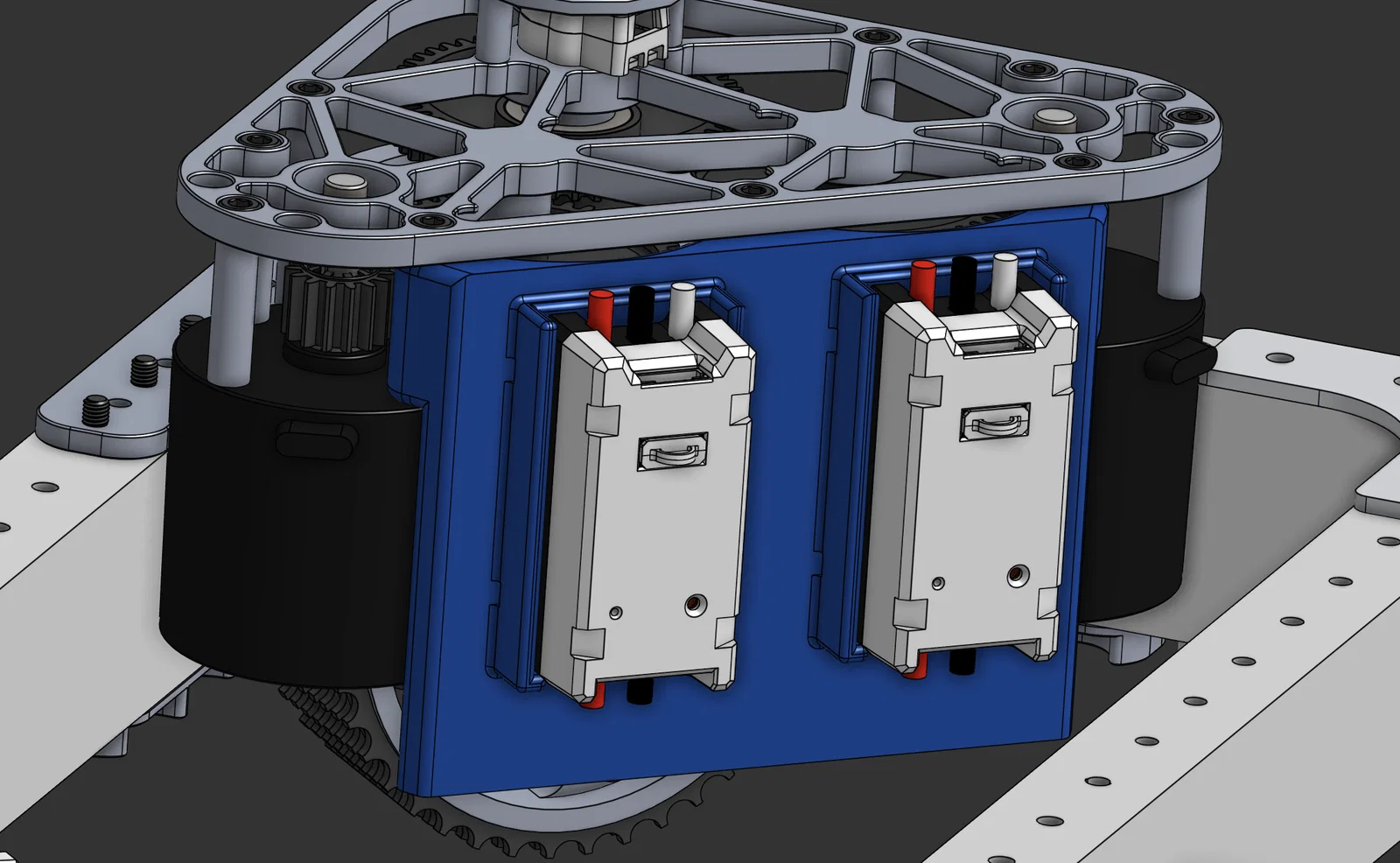
Đây là mẫu thiết kế giá đỡ chuyên dụng giúp bạn lắp đặt bộ điều khiển động cơ Spark Max lên hệ thống MK4i Swerve Drive một cách gọn gàng và chắc chắn nhất. Mẫu này là phiên bản cải tiến từ thiết kế gốc, với phần đáy đã được kéo dài xuống dưới để tiếp xúc hoàn hảo với tấm đế (base plate) của robot, tạo nên một liên kết vững chãi hơn trong môi trường vận hành cường độ cao của các giải đấu robot FRC.
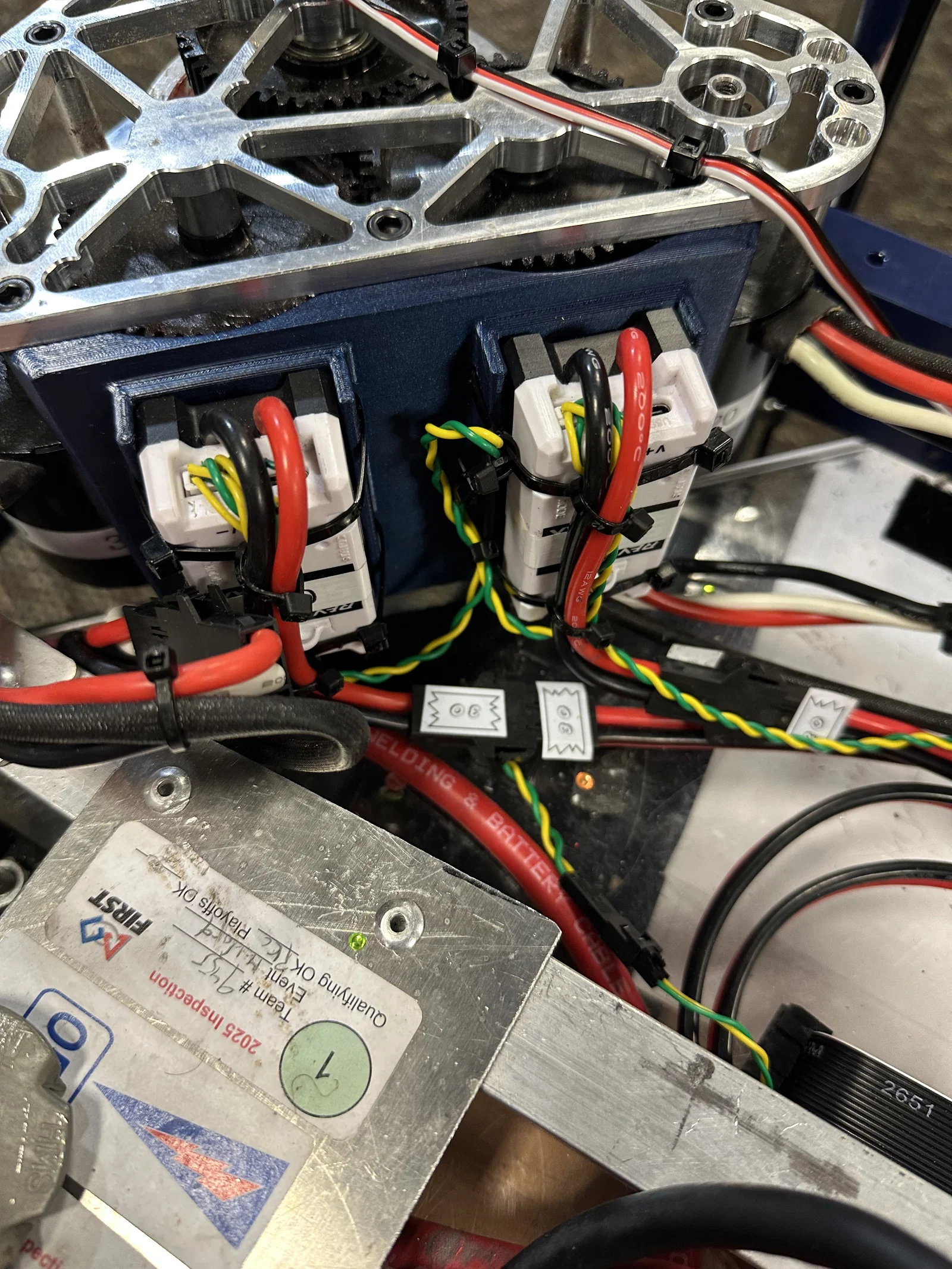
Việc sắp xếp hệ thống dây điện và linh kiện điều khiển trên các hệ thống Swerve thường khá phức tạp do không gian hạn chế. Với giá đỡ này, các bộ Spark Max được cố định đúng vị trí, giúp bảo vệ thiết bị tránh khỏi va đập và rung lắc khi robot di chuyển với tốc độ cao. Đây là giải pháp lý tưởng cho các đội thi đấu muốn tối ưu hóa không gian bên trong chassis, đảm bảo tính thẩm mỹ và độ tin cậy cho hệ thống điều khiển.
Thiết kế này được tối ưu hóa để in 3D với độ bền cao. Bạn có thể sử dụng linh hoạt các vật liệu in phổ biến hiện nay. Dưới đây là một số thông tin hữu ích khi bạn tiến hành in và lắp đặt mẫu này:
- Khả năng tương thích hoàn hảo với module Swerve Drive Specialties (SDS) MK4i.
- Thiết kế đã được kéo dài phần đáy để tăng diện tích tiếp xúc, giúp tăng cường độ ổn định cấu trúc.
- Hỗ trợ lắp đặt nhanh chóng, tiết kiệm thời gian bảo trì hoặc thay thế linh kiện trong quá trình thi đấu.
- Khuyến khích in với vật liệu có độ bền cơ học tốt như PETG hoặc ABS để chịu được nhiệt độ và áp lực.
- Để đạt độ cứng cáp tối đa, bạn nên in nghiêng mẫu trên bàn in thay vì đặt phẳng, điều này giúp các lớp nhựa (layer) phân bổ lực tốt hơn, dù in đứng vẫn hoàn toàn đảm bảo độ bền.
- Hãy chú ý đến thông số in như độ dày thành (wall thickness) ít nhất 3-4 lớp và mật độ lấp đầy (infill) từ 40% trở lên để đảm bảo khả năng chịu tải.
Hy vọng mẫu giá đỡ này sẽ giúp đội ngũ của bạn hoàn thiện robot nhanh chóng và đạt kết quả tốt nhất trong các trận đấu. Hãy kiểm tra kỹ các lỗ bắt vít trước khi lắp lên robot để đảm bảo mọi thứ khớp hoàn hảo với khung chassis hiện tại của bạn.
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!