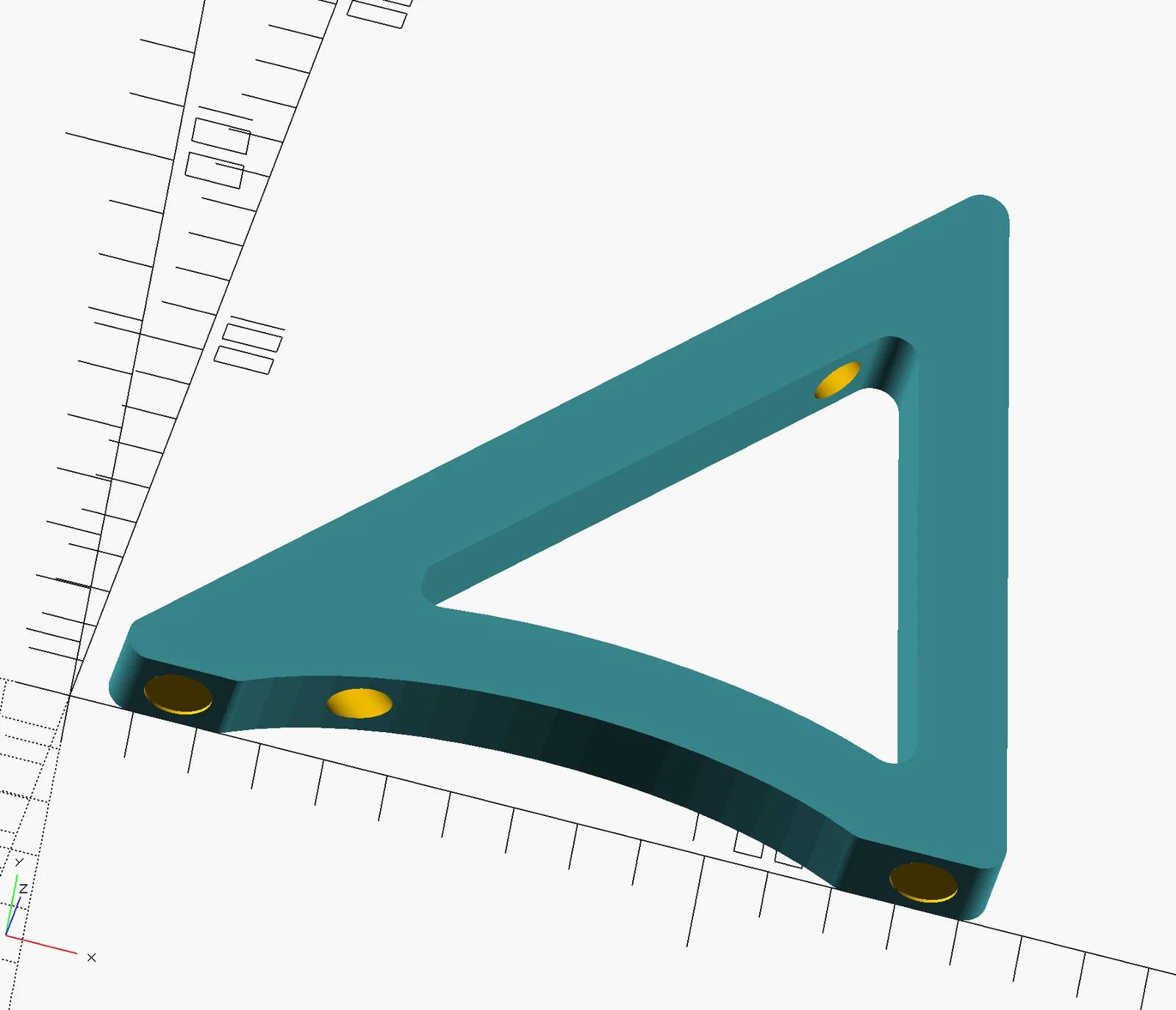
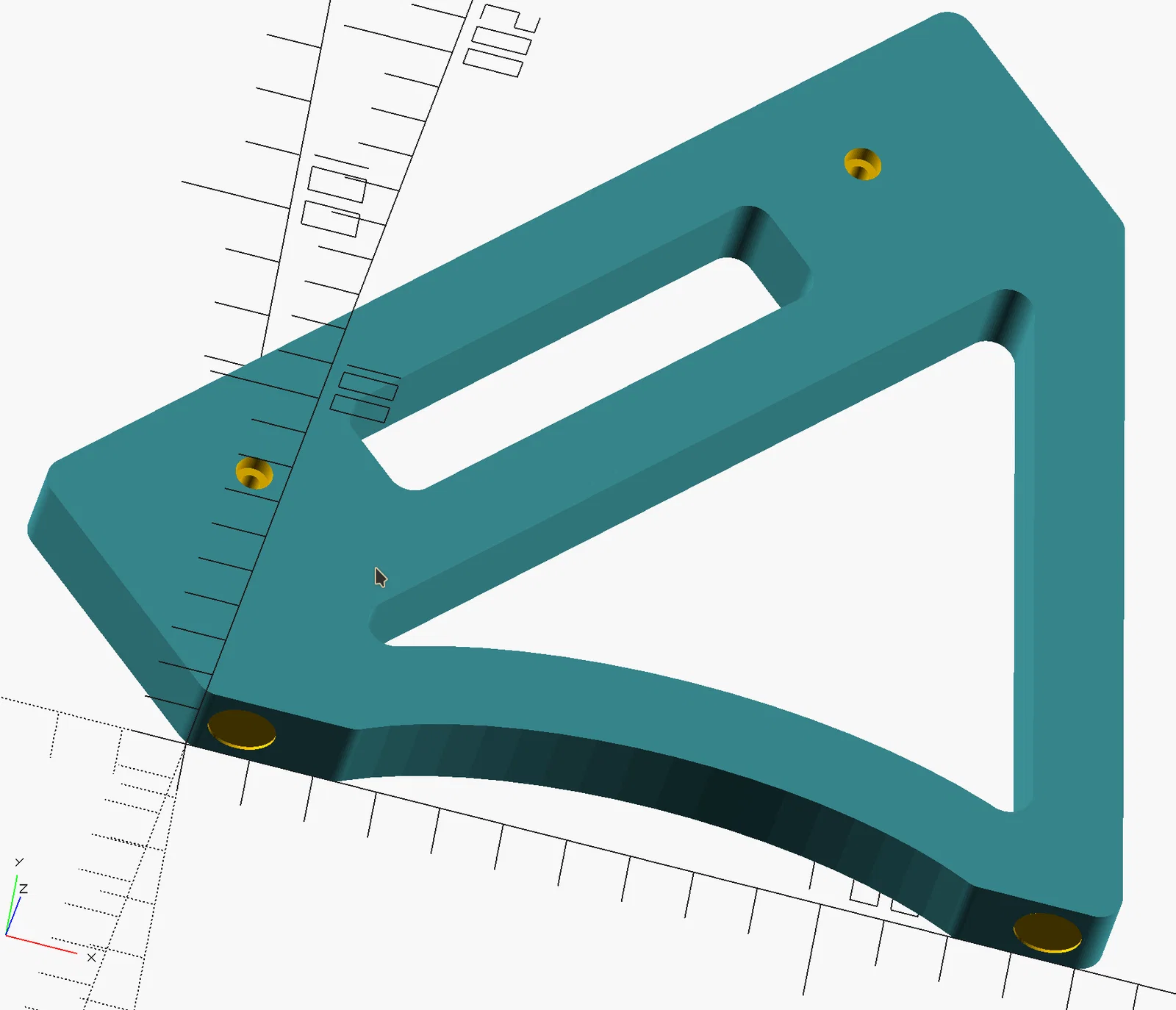
Chân đế Parametric cho thiết bị Elektron

Bộ chân đế được thiết kế theo thông số (parametric) dành cho các thiết bị Elektron. Bạn có thể dễ dàng tùy chỉnh độ dày, góc nghiêng và lỗ gắn chân cao su để phù hợp với nhu cầu sử dụng của mình.
14
Lượt Xem
0
Lượt Thích
1
Lượt Tải
Cập Nhật May 29, 2026
Mô tả
Bạn có thể tùy chỉnh các thông số sau:
- độ dày (thickness)
- góc nghiêng (angle)
- khoảng cách thêm để tăng độ ổn định
- thông số khoét lỗ cho chân cao su (rubber foot cutout)
Mình đã in bằng nhựa PLA, độ phân giải 0.3mm (do mình không đợi được lâu) và độ lấp đầy (infill) là 15%.
Sử dụng ốc vít m3/m4 loại đầu trụ (hoặc bạn có thể chỉnh sửa lại code để khớp với loại ốc của bạn).
Các file STL cung cấp được thiết kế cho loại chân cao su Ø10mm với độ hở 0.5mm (mình đã dùng loại này).
Cho mình biết nếu bạn cần chỉnh sửa gì thêm nha.
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...


Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!