Mô hình robot mini tự lắp ráp học lập trình MicroPython

Khám phá dự án robot mini 3D cực kỳ thú vị, được thiết kế chuyên biệt để giúp bạn học tập và thực hành lập trình với MicroPython. Mô hình này là lựa chọn hoàn hảo cho những người đam mê công nghệ muốn tự tay lắp ráp một hệ thống chuyển động linh hoạt. Với yêu cầu lắp đặt đơn giản bao gồm 8 động cơ servo và 1 bo mạch điều khiển RP2040, đây chính là cơ hội để bạn làm quen với lĩnh vực robot học đầy tiềm năng. Sản phẩm không chỉ có tính ứng dụng cao trong việc học tập mà còn là minh chứng cho sự kết hợp hoàn hảo giữa công nghệ in 3D và lập trình hiện đại. Bạn sẽ được tự tay hoàn thiện từ khâu in ấn bộ khung đến lắp đặt linh kiện, qua đó hiểu rõ hơn về cơ chế vận hành của hệ thống servo và các dòng code điều khiển chuyển động thông minh.


Mô tả
Mô hình robot mini tự lắp ráp học lập trình MicroPython
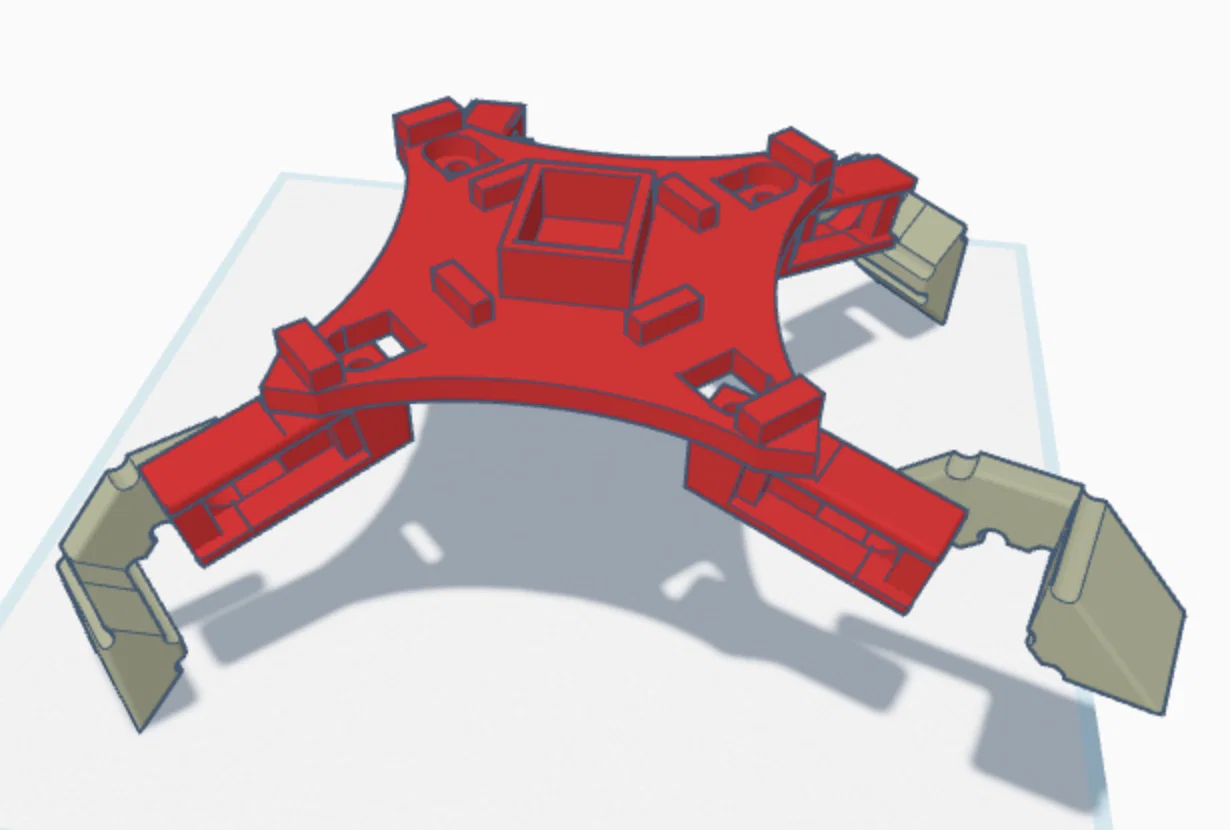
Bạn đang tìm kiếm một dự án thú vị để bắt đầu với thế giới robot học và lập trình? Mẫu robot mini này chính là lựa chọn tuyệt vời dành cho những ai mới bắt đầu hoặc muốn nâng cao kỹ năng với MicroPython. Với thiết kế nhỏ gọn, tinh tế, bộ khung này cho phép bạn xây dựng một chú robot linh hoạt, hỗ trợ tốt cho việc thực hành các thuật toán điều khiển chuyển động và tự động hóa cơ bản ngay tại nhà.
Cấu trúc của mô hình được thiết kế tối ưu để chứa các linh kiện điện tử thông dụng, đảm bảo tính thẩm mỹ nhưng vẫn dễ dàng trong việc lắp ráp. Bạn chỉ cần sở hữu một chiếc máy in 3D, vài cuộn nhựa chất lượng và bộ linh kiện tương ứng là đã có thể bắt tay vào hiện thực hóa ý tưởng của mình. Đây không chỉ là một món đồ chơi công nghệ, mà còn là công cụ học tập đắc lực giúp bạn hiểu rõ cách thức hoạt động của các khớp nối servo và tư duy logic trong lập trình hệ thống nhúng.
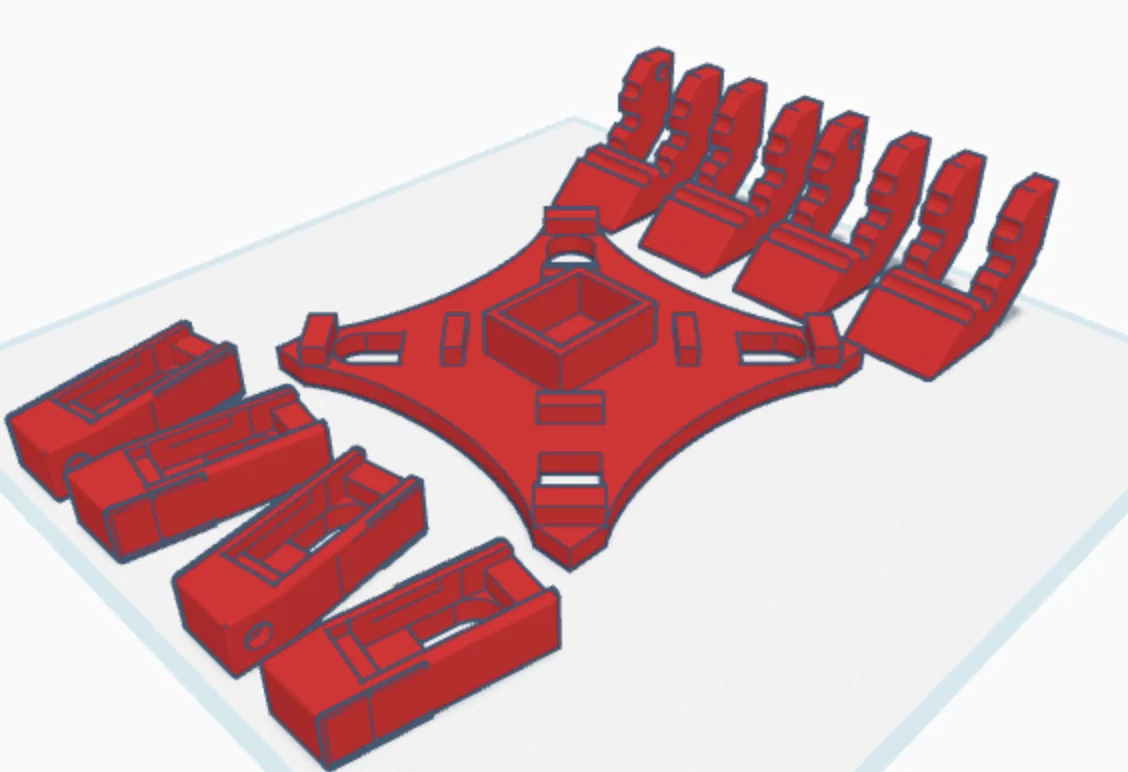
Để hoàn thiện chú robot này, bạn cần chuẩn bị đầy đủ các thành phần kỹ thuật cơ bản sau đây:
- Bộ khung robot: Bạn nên in bằng nhựa PLA hoặc PETG để có độ cứng cáp và chính xác cao nhất cho các khớp nối.
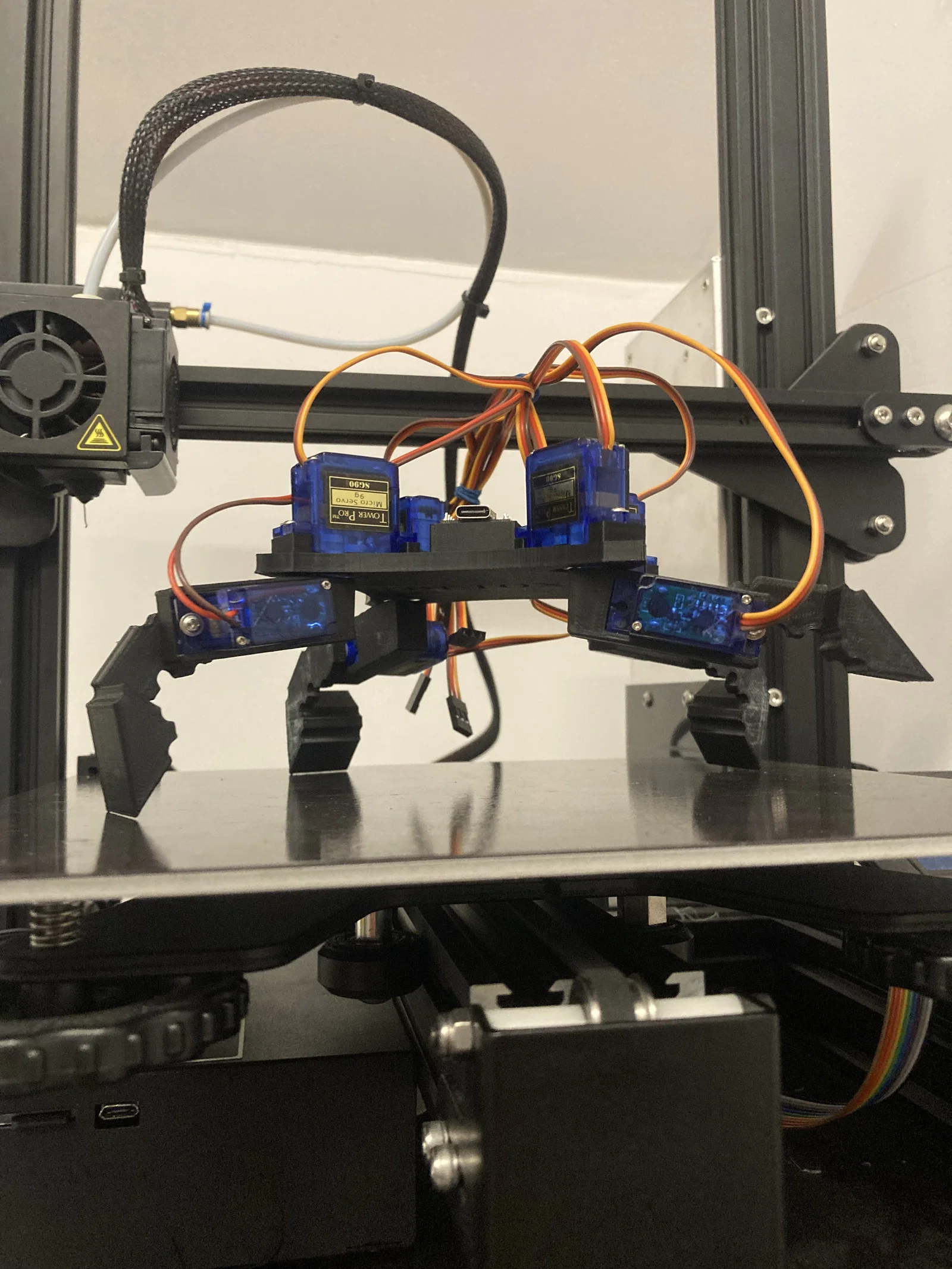
- Động cơ servo: Model này yêu cầu 8 động cơ servo loại 9g (như Tower Pro SG90) để vận hành các khớp chân.
- Bộ điều khiển: Cần một bo mạch RP2040 để làm bộ não trung tâm, điều khiển toàn bộ các tác vụ xử lý và vận hành chuyển động.
- Lập trình: Tận dụng môi trường MicroPython để viết code điều khiển, giúp việc học trở nên trực quan và dễ dàng hơn nhiều so với các ngôn ngữ cấp thấp.
- Mẹo in 3D: Hãy sử dụng độ dày lớp in (layer height) từ 0.2mm để đảm bảo độ mịn của bề mặt, đồng thời nên dùng infill khoảng 20-30% để robot vừa nhẹ lại vừa bền.
- Lưu ý lắp ráp: Hãy kiểm tra kỹ các vị trí gắn servo trước khi cố định hoàn toàn để tránh hiện tượng vướng víu trong quá trình vận hành sau này.
Việc tự tay lắp ráp và lập trình cho một chú robot từ chính những linh kiện in 3D sẽ mang lại cho bạn sự phấn khích tuyệt vời. Bạn sẽ học được cách phối hợp giữa phần cứng và phần mềm, đồng thời phát triển kỹ năng giải quyết vấn đề. Hãy bắt đầu in các bộ phận ngay hôm nay và thử nghiệm những bước di chuyển đầu tiên cho chú robot của riêng mình!
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!