Mô hình robot bốn chân Sleipnir in 3D linh hoạt cho Servo MG995

Khám phá dự án robot bốn chân Sleipnir đầy thú vị, được thiết kế chuyên biệt để tương thích với các dòng động cơ servo phổ biến như MG995 và MG996R. Đây là một bộ khung in 3D chất lượng cao, cho phép anh em yêu thích công nghệ có thể dễ dàng tự tay lắp ráp một chú robot bốn chân có khả năng di chuyển linh hoạt. Bài viết hướng dẫn chi tiết về các thông số in 3D quan trọng như vật liệu, độ lấp đầy và cách lắp đặt các linh kiện điện tử cơ bản. Sản phẩm không chỉ là một mô hình trưng bày đẹp mắt mà còn là một bài thực hành kỹ thuật tuyệt vời về cơ học và lập trình robot. Hãy cùng bắt tay vào in ấn và hiện thực hóa chú robot Sleipnir cá tính của riêng bạn ngay hôm nay với những hướng dẫn hữu ích từ chúng tôi.
Mô tả
Dự án robot bốn chân Sleipnir tự chế
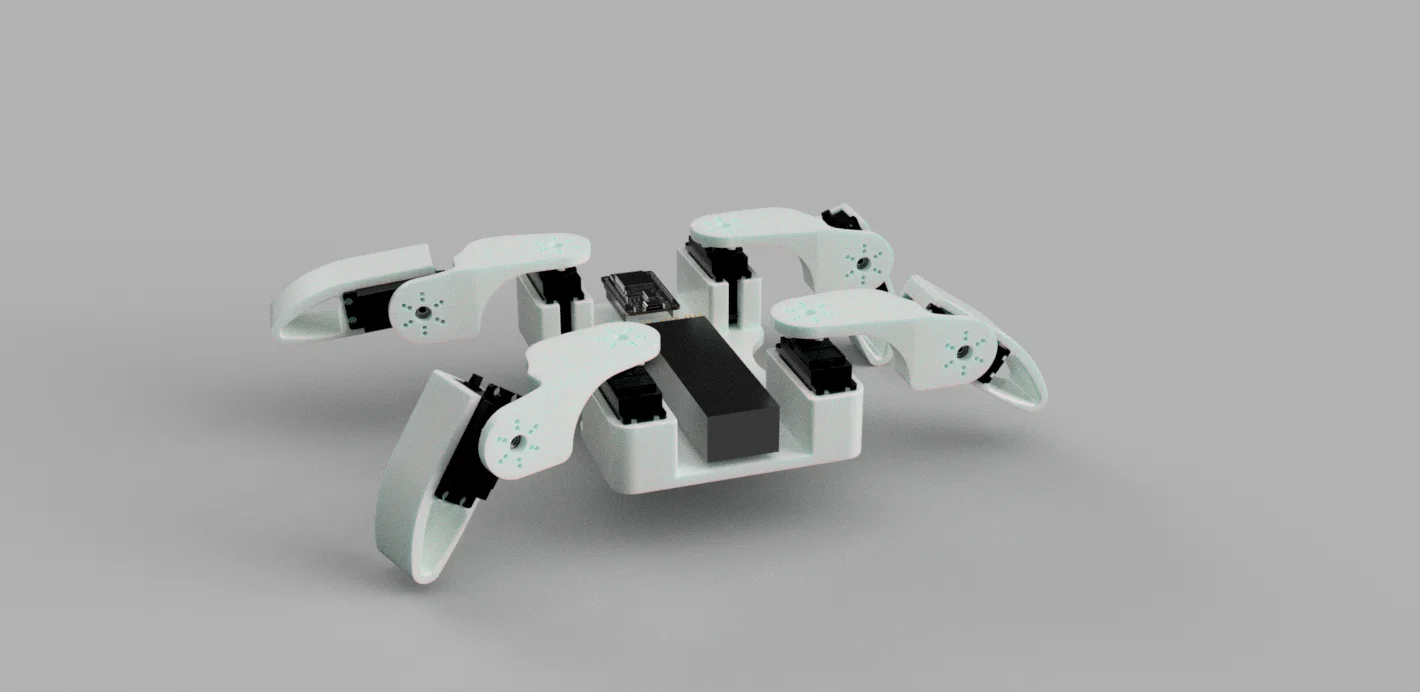
Nếu anh em đang tìm kiếm một dự án thú vị để thử thách kỹ năng lắp ráp và lập trình, thì mô hình robot bốn chân Sleipnir này là lựa chọn cực kỳ lý tưởng. Đây là một bộ khung robot tự thiết kế với cấu trúc 4 chân, cho phép mô phỏng cách di chuyển của các loài động vật bốn chân trong thực tế. Sản phẩm được thiết kế tối ưu để tương thích hoàn hảo với các dòng động cơ servo phổ biến như MG995 hoặc MG996R, giúp anh em dễ dàng tìm kiếm linh kiện thay thế hoặc nâng cấp.
Việc lắp ráp con robot này không chỉ là một bài tập thực hành in 3D cơ bản mà còn là cơ hội để anh em tìm hiểu sâu hơn về cơ học và điều khiển chuyển động. Cấu trúc khung được chia thành các phần tách biệt, hỗ trợ các khớp nối linh hoạt, cho phép robot thực hiện những bước đi cơ bản một cách mượt mà. Đây chắc chắn là món đồ chơi công nghệ độc đáo mà bất cứ người chơi hệ robot học nào cũng muốn sở hữu trong bộ sưu tập của mình.
Để đạt được kết quả in 3D tốt nhất, anh em nên lưu ý những điểm sau đây khi thực hiện dự án này:
- Khả năng tương thích: Bộ khung được tối ưu cho các dòng servo cỡ lớn như MG995/MG996R, anh em hãy kiểm tra kỹ kích thước motor trước khi bắt đầu.
- Vật liệu in: Nên ưu tiên sử dụng nhựa PLA hoặc PETG để đảm bảo độ cứng cáp và chịu lực tốt cho các khớp nối trong quá trình vận hành.
- Cấu trúc hỗ trợ: Một số chi tiết ở phần khớp chân sẽ cần thêm support khi in để đảm bảo độ chính xác của lỗ bắt vít và trục quay.
- Thiết lập in: Đề nghị sử dụng độ dày lớp (layer height) khoảng 0.2mm với tỉ lệ lấp đầy (infill) từ 30-40% để đảm bảo khung chịu được sức nặng của chính nó và động cơ.
- Lắp ráp: Hãy chú ý siết chặt các khớp nối nhưng không quá mạnh tay để tránh làm nứt các chi tiết nhựa sau khi in.
- Lập trình: Sau khi hoàn thiện phần khung, anh em có thể kết hợp với các board mạch điều khiển như Arduino để bắt đầu viết code điều khiển các bước đi cho Sleipnir.
Sleipnir là một dự án tuyệt vời để anh em thể hiện sự sáng tạo và đam mê công nghệ của mình. Với thiết kế mở, anh em hoàn toàn có thể tùy biến thêm các cảm biến hoặc vỏ ngoài để biến con robot này thành một sản phẩm mang đậm dấu ấn cá nhân.
Giấy phép

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!