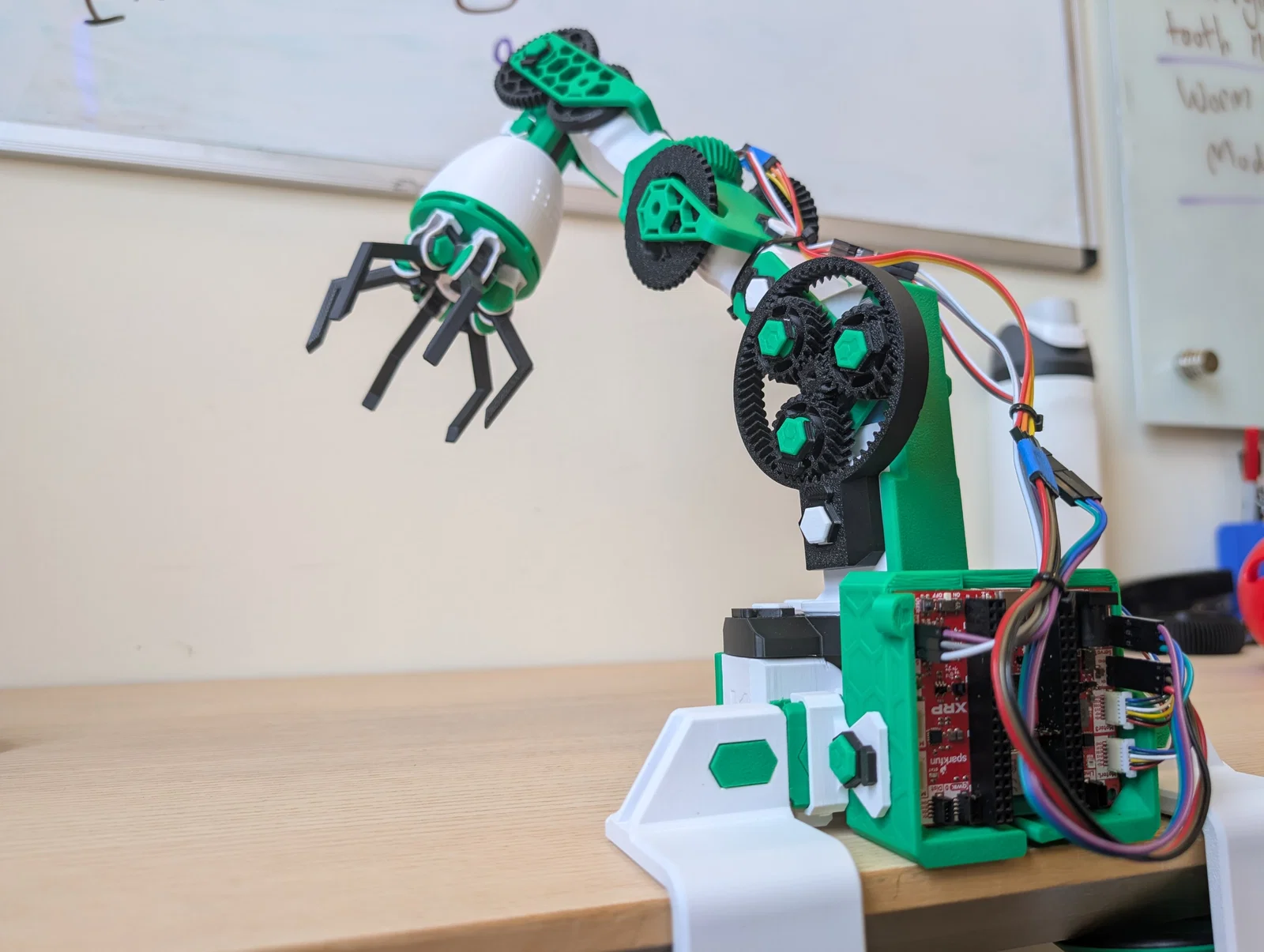
ArmXRP Alpha - Cánh tay robot in 3D screwless 100% (không cần ốc vít)

Cánh tay robot ArmXRP Alpha 100% 3D-printed, lắp snap-fit bằng SnapBolt-HexClip không cần ốc vít/dụng cụ. 4 DOF, end effector modular, tải khoảng 150 g. Kèm đủ STL chi tiết cơ khí, kẹp bàn, và file STEP.











Mô tả
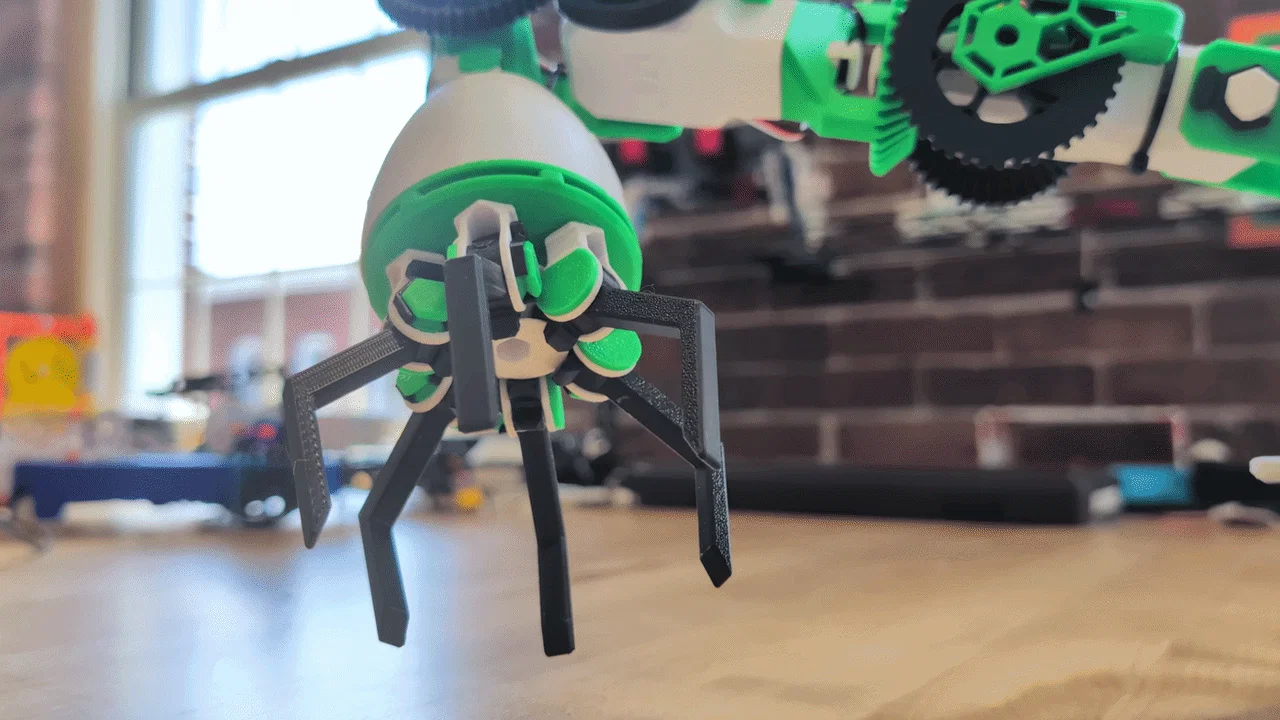
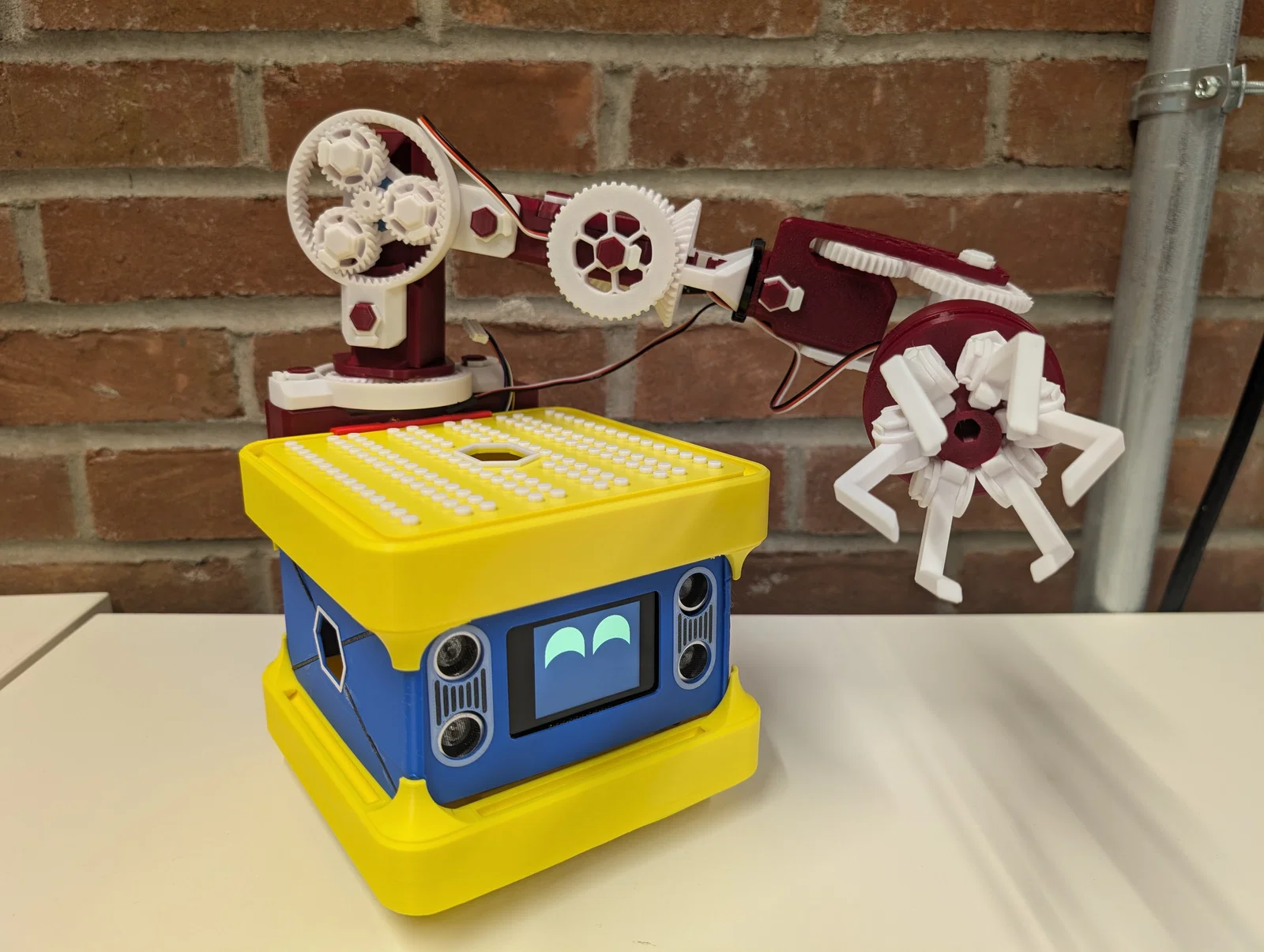
ArmXRP Alpha là một cánh tay robot 100% 3D-printed, lắp ráp không cần ốc vít (screwless), được thiết kế xoay quanh hệ sinh thái robotics SparkFun XRP. Dùng hệ lắp ráp SnapBolt-HexClip, ArmXRP có thể ráp mà không cần screws, fasteners hay tools, nên rất dễ tiếp cận cho học sinh, giáo viên và các bạn làm robotics. Cánh tay có 4 degrees of freedom (4 DOF) kèm end effector dạng modular, và có thể nâng tải tối đa khoảng 150 g.
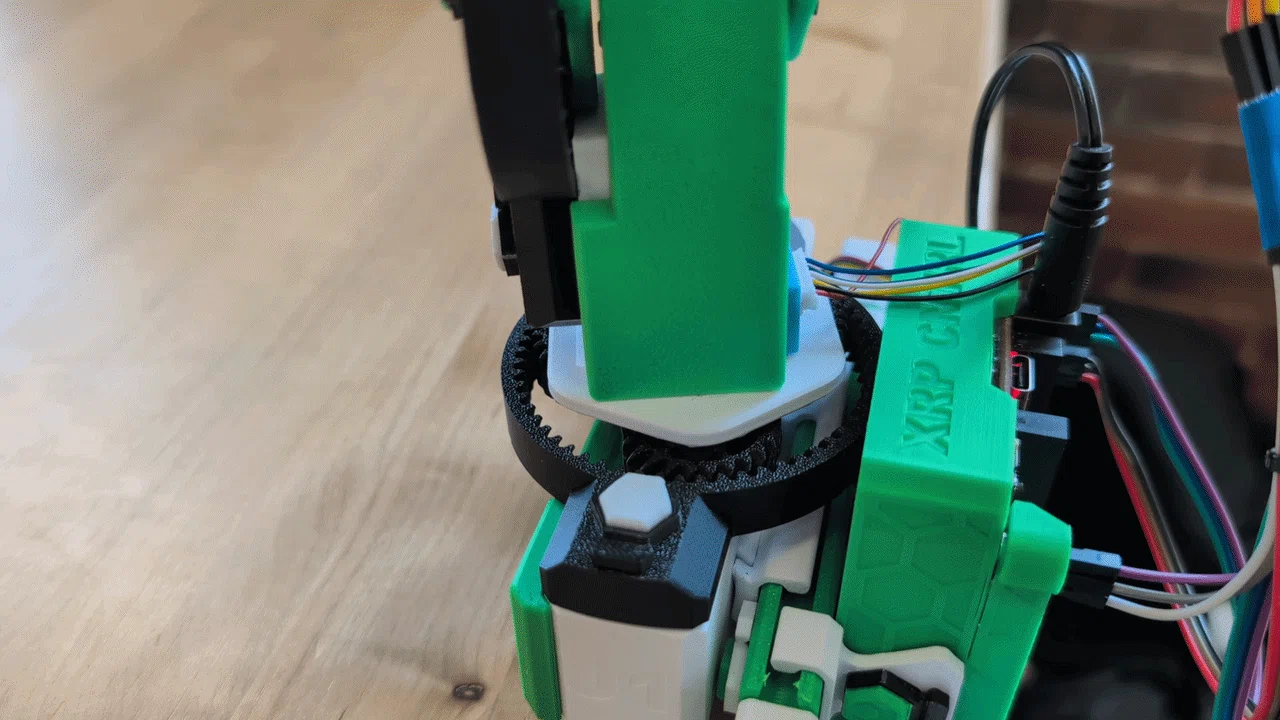
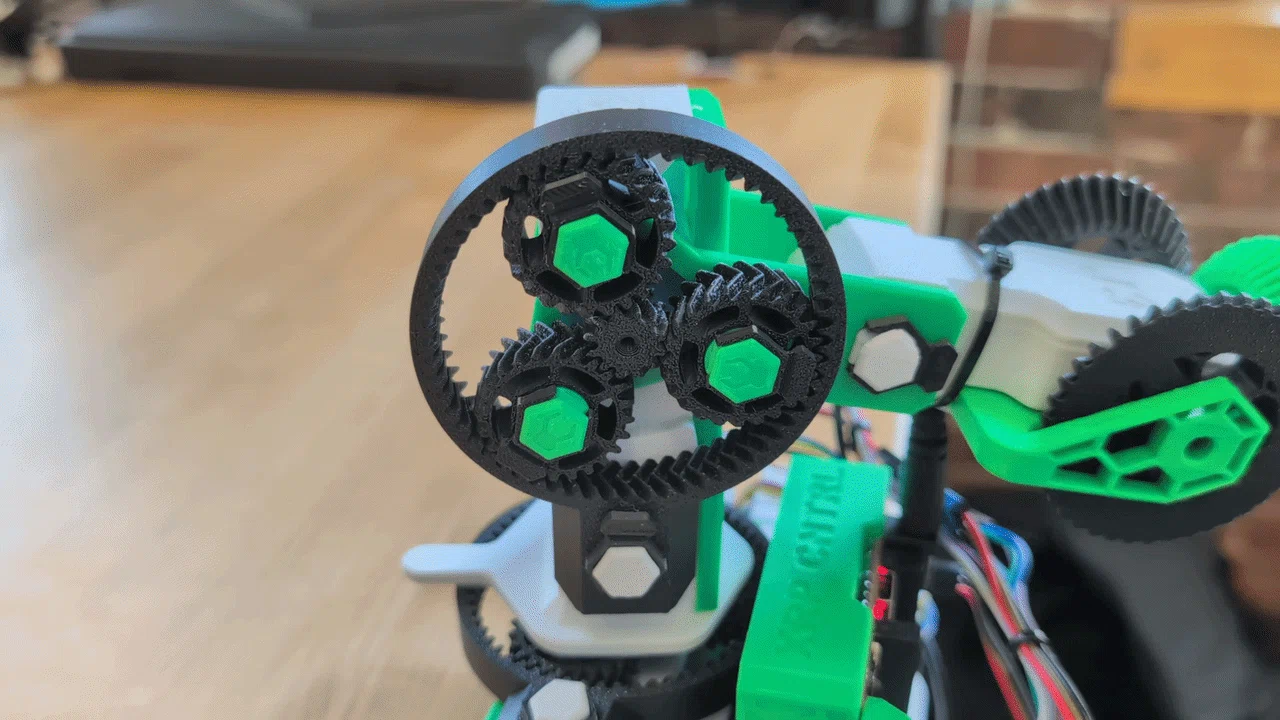
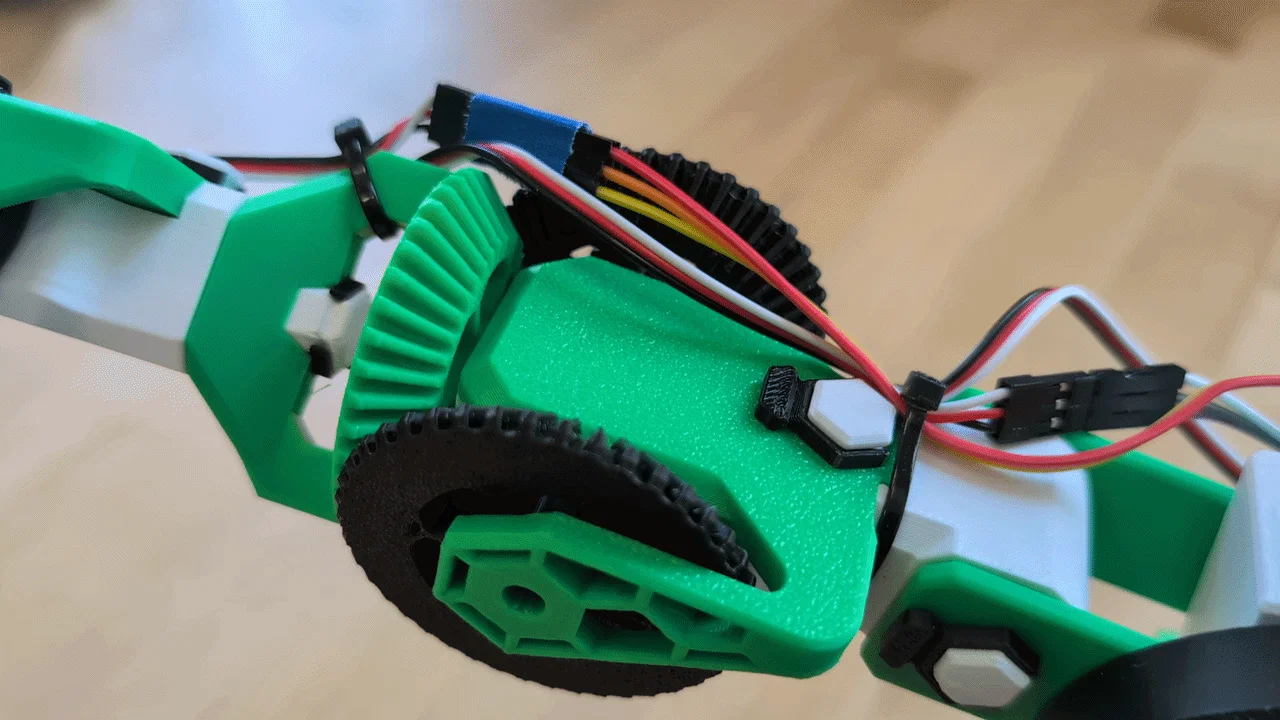
Bản upload này bao gồm toàn bộ các chi tiết cơ khí có thể 3D-print để lắp ráp, gồm: đế (base), các khớp (joints), các đoạn tay (arm links), các cụm chi tiết end effector modular, các chi tiết truyền động bánh răng (gear train), và kèm theo một kẹp bàn (table clamp) cũng 3D-printed. Thiết kế có tích hợp planetary gearboxes, bevel gearsets, spur gears và worm drives để bạn khám phá nhiều khái niệm truyền công suất cơ khí trong một cánh tay robot giáo dục gọn nhẹ.
ArmXRP Alpha dùng hệ SnapBolt-HexClip, cho phép ráp, tháo và cấu hình lại các phần mà không cần tools. Nhờ vậy nền tảng này đặc biệt hợp cho lớp học, CLB robotics, đội dự án và rapid prototyping. Hệ gắn end effector modular cho phép thay nhiều loại gripper, tools hoặc các món gắn thử nghiệm khác để mở rộng về sau.
Được thiết kế như một phần trong hệ sinh thái XRP rộng hơn, ArmXRP Alpha nhắm tới việc giúp học sinh học “tận tay” về robotics, cơ cấu (mechanisms), gear reduction, motion control, end effectors và thiết kế cơ khí. Sau khi in và lắp xong, cánh tay có thể ghép với motors, electronics và hệ điều khiển dựa trên XRP để tạo thành một nền tảng thao tác robot (robotic manipulation) phục vụ giáo dục đầy đủ.
Bill of Materials (with and without existing XRP Kit)
Hướng dẫn in (Printing Instructions):
Tất cả file STL đều đã có sẵn support được thiết kế riêng, nên không cần tạo supports bằng slicer. Mỗi chi tiết cũng đã được xoay sẵn (pre-oriented) để in và khi import vào slicer thì sẽ ở đúng hướng.
Ngoài các file STL riêng lẻ (trong đó tên file có ghi số lượng chi tiết), bản phát hành này còn có các file STL dạng nhóm được sắp theo ba thư mục plate. Các plate group này được thiết kế theo build volume tiêu chuẩn 256 mm × 256 mm của Bambu Lab.
Nếu máy in của bạn có kích thước bàn in tương tự, bạn có thể mở một thư mục plate, chọn tất cả file bằng Ctrl+A và import vào slicer cùng lúc. Các chi tiết trong từng thư mục plate đã được nhân bản đúng số lượng và lưu đúng hướng in. Sau khi import, dùng chức năng auto-arrange của slicer, kiểm tra lại bố cục, rồi in.
Quy trình in theo grouped-plate này nhằm tiết kiệm thời gian setup, nhưng vẫn cho phép bạn in từng chi tiết riêng lẻ khi cần.
File STEP có sẵn trong file ZIP đính kèm.
Thông báo bản phát hành Alpha (Alpha Release Notice):
ArmXRP hiện đang ở giai đoạn alpha và là một bản phát hành “đầy đủ sớm” của hệ thống trước khi tinh chỉnh lên beta. Nền tảng hoạt động được và thể hiện kiến trúc cơ khí cốt lõi, hệ lắp ráp screwless, giao diện end effector modular và ý tưởng cánh tay robot dựa trên XRP. Tuy nhiên, bản này vẫn được đưa ra để test, nhận góp ý và tiếp tục lặp cải tiến.
Vì là alpha, một số chi tiết có thể cần in kỹ, tinh chỉnh (tuning) hoặc chỉnh nhẹ tùy theo hiệu chuẩn máy in, vật liệu và điều kiện lắp ráp. Bên mình rất mong nhận phản hồi từ giáo viên, học sinh, makers và các bạn làm robotics. Trải nghiệm của bạn khi in, lắp, test và chỉnh sửa ArmXRP sẽ giúp định hướng giai đoạn phát triển tiếp theo để ra bản beta hoàn thiện hơn.
Vui lòng gửi mọi phản hồi về: [email protected], cảm ơn nhiều!!
Giấy phép

File mô hình























































































































Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!