Dụng cụ căng dây và giảm chấn cho gân robot (Bộ truyền động đàn hồi chuỗi)

Điều chỉnh độ căng cho một chuỗi có độ đàn hồi cho bộ truyền động đàn hồi loạt cho robot quy mô nhỏ

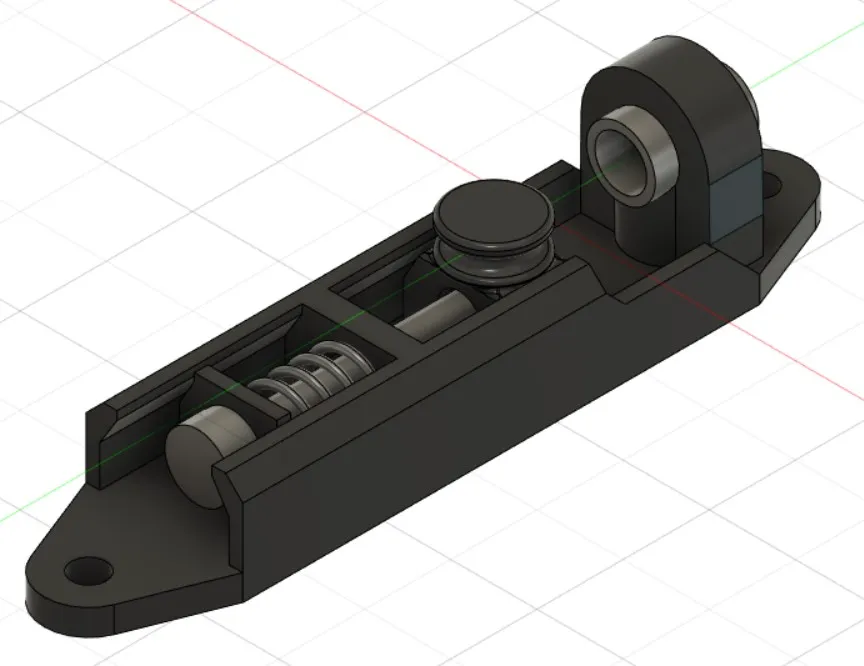


Mô tả
Đây là một bộ căng dây cho các gân robot với độ đàn hồi có thể điều chỉnh cho các bộ truyền động đàn hồi series mà tôi đã làm cho các dự án của mình. Ở đầu kia của dây cần có một bộ truyền động kéo dây như một cuộn hoặc một cần gạt đơn giản. Chỉ cần gắn nó vào tay của một servo hoặc cuốn nó lên bằng một động cơ. Lò xo hoạt động như một bộ giảm chấn tuyệt vời để bảo vệ bộ truyền động.
Bằng cách vặn vít, bạn kéo vào gân và nén lò xo để điều chỉnh độ căng trong khi vẫn duy trì độ đàn hồi.
Để lắp ráp, bạn sẽ cần một vít M2 dài 10-20mm, một đai ốc phẳng M2 và một mảnh lò xo theo độ đàn hồi cơ bản mà bạn mong muốn. Để thử nghiệm hoặc độ đàn hồi mềm, tôi thấy lò xo bút bi rất hoàn hảo. Nếu bạn muốn bảo vệ gân của mình khỏi sự mài mòn, tôi khuyên bạn nên chèn một mảnh ống PTFE nhỏ (ống Bowden) vào hướng dẫn gân như đã thấy trong ảnh. Có một lỗ 2.5mm ở dưới cùng mà bạn có thể luồn một vít grub không đầu M3 (tối đa 4mm) để giữ ống PTFE tại chỗ.
Về vật liệu dây, tôi khuyên bạn nên sử dụng dây câu cá.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — NoDerivativesCC-BY-NC-ND

File mô hình



Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!