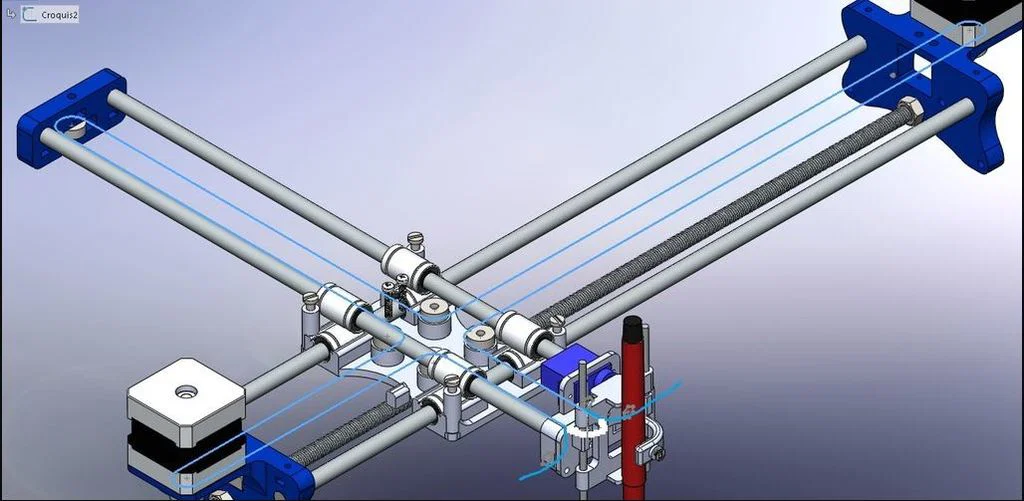
Drawing Robot - Arduino Uno + CNC Shield + GRBL

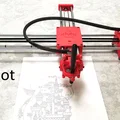
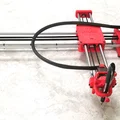
DrawBot là dòng robot vẽ giá rẻ (khoảng 100 USD) vận hành bằng Arduino Uno, CNC Shield và phần mềm mã nguồn mở. Dự án này cho phép bạn vẽ trên Inkscape và xuất ra file G-Code để máy thực hiện một cách chính xác.




























Mô tả
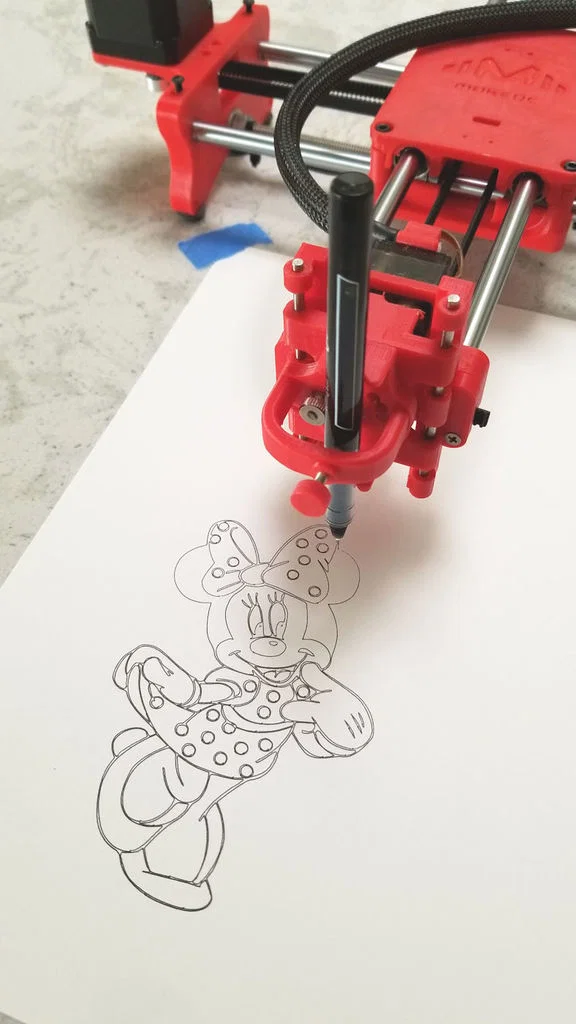
DrawBot là một dòng máy vẽ tương tự như AxiDraw thương mại. Máy được điều khiển bằng bo mạch Arduino Uno, kết hợp với CNC Shield và sử dụng firmware GRBL. Chi phí để tự lắp ráp một bộ DrawBot rơi vào khoảng 100 USD.
Gần đây, một số người chơi Drawing Robot có phản ánh về tình trạng treo máy khi sử dụng phần mềm. Tôi không phải là người viết các phần mềm này; chúng đều là mã nguồn mở hoặc các phần mềm thương mại phổ biến. Tôi chưa từng gặp lỗi treo máy, nhưng nhận thấy một số bạn đã tự ý thay đổi tổ hợp phần mềm so với hướng dẫn. Rất khó để tôi có thể hỗ trợ khắc phục lỗi cho mọi tổ hợp phần mềm khác nhau. Dự án này phụ thuộc hoàn toàn vào GRBL, Inkscape, Java và Universal G-Code Sender. Tôi từng thấy các phiên bản Inkscape khác nhau xung đột với Java hoặc GRBL. Đó là lý do tại sao tôi đề xuất một bộ phần mềm đã được kiểm chứng là hoạt động ổn định. Tôi chia sẻ dự án này để mọi người có một món đồ chơi công nghệ thú vị, không phải là một sản phẩm thương mại hoàn thiện. Nếu bạn quyết định dùng phần mềm khác, bạn sẽ phải tự mình xử lý các vấn đề phát sinh.
Nếu bạn muốn lắp ráp robot này, hãy chắc chắn đã kiểm tra các mục sau trước khi thông báo lỗi:
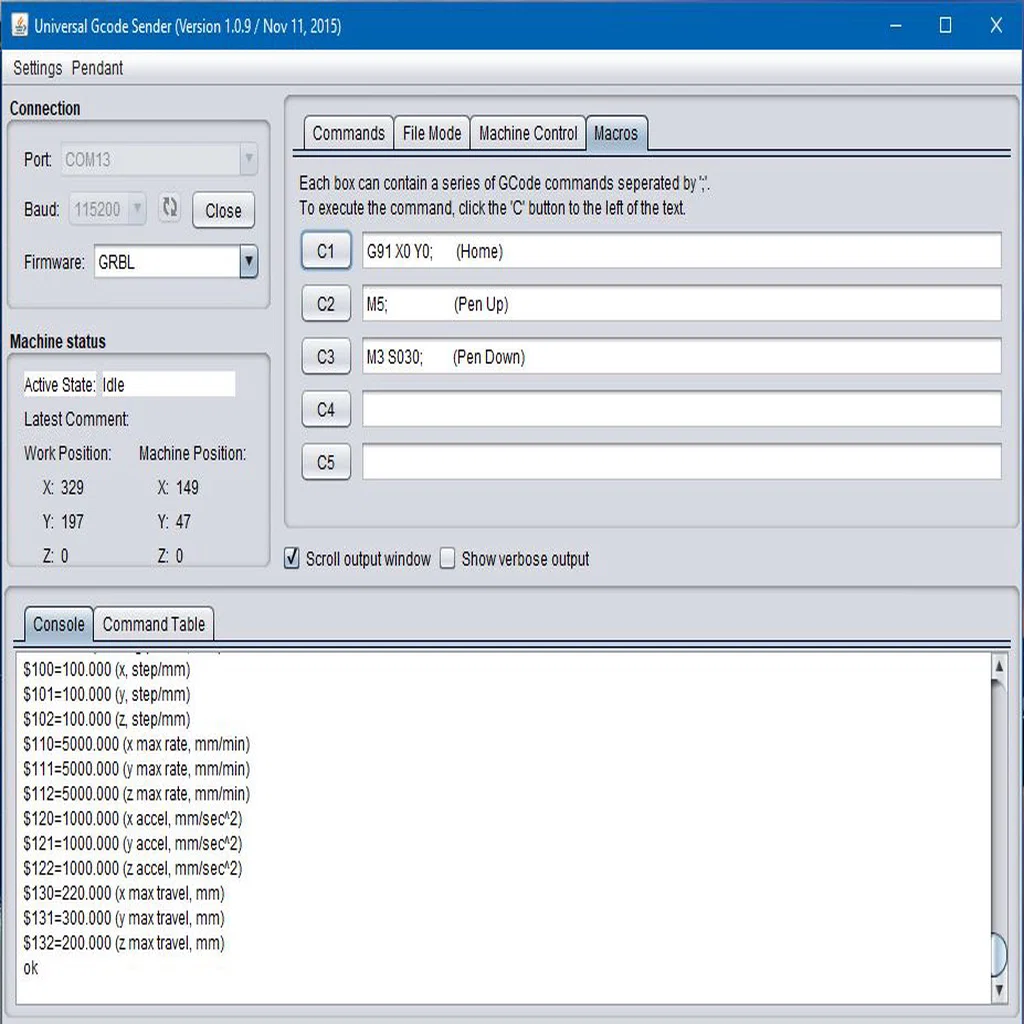
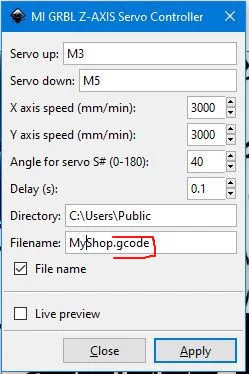
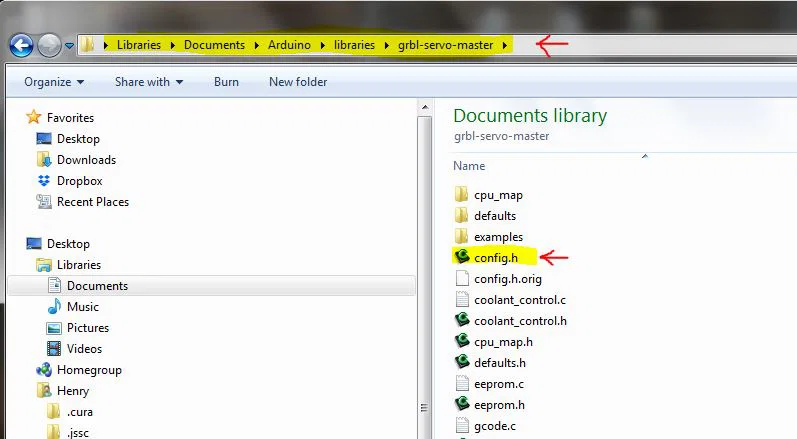
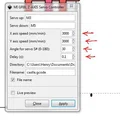
- Đảm bảo máy tính của bạn đã cài Python 3.7.X hoặc 3.8.X. Python 3.9.X không hoạt động. Việc các phiên bản Python không tương thích với giải pháp này khá gây ức chế. Python là bắt buộc để chạy Universal G-Code Sender và MI GRBL Extension trong Inkscape. Lỗi Python thường là do bạn chưa cài hoặc đang cài bản 2.X thay vì 3.X. Nếu vẫn gặp lỗi 'py', hãy copy file servo.py đi kèm vào thư mục extension.
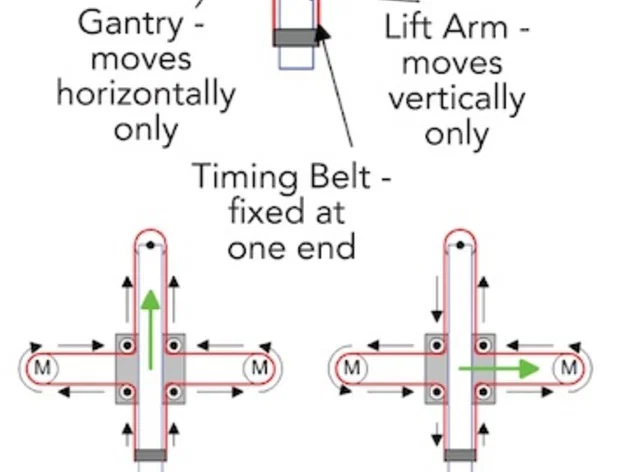
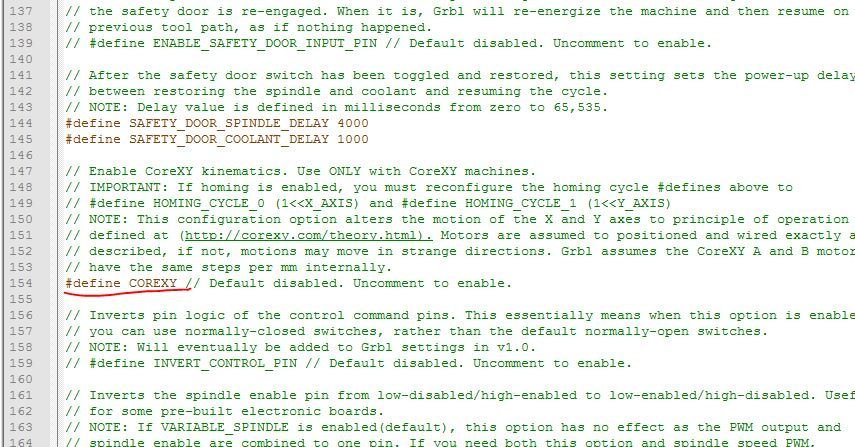
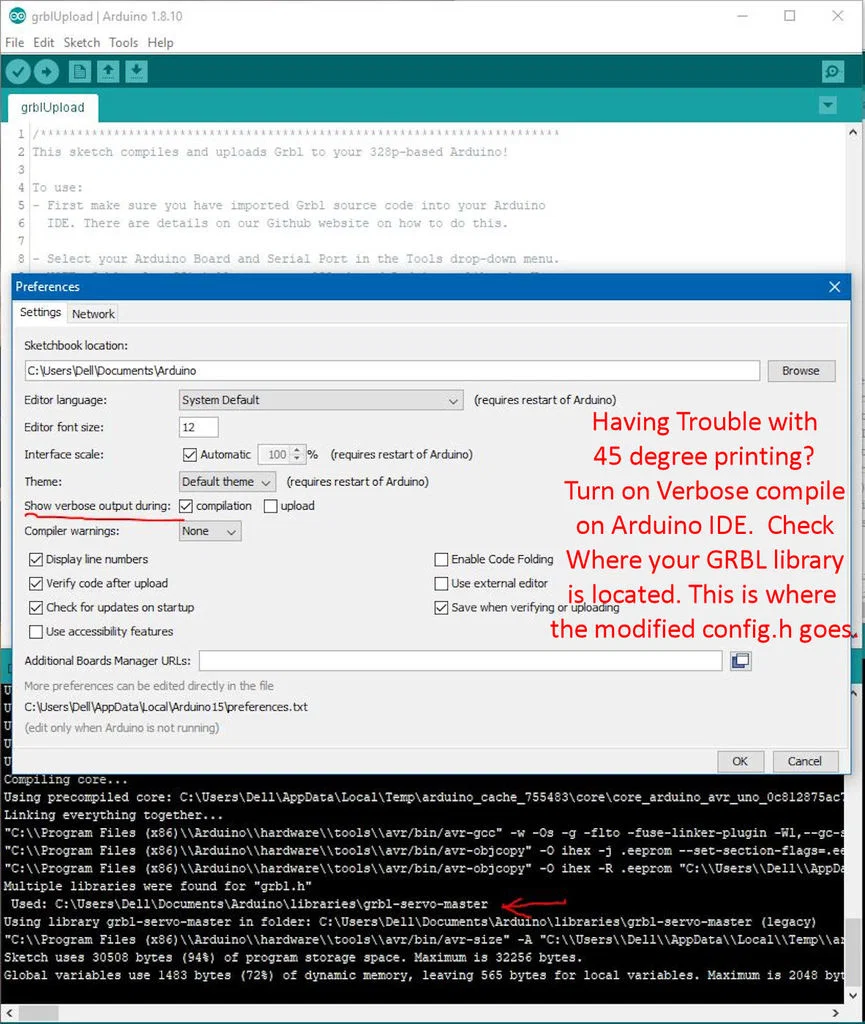
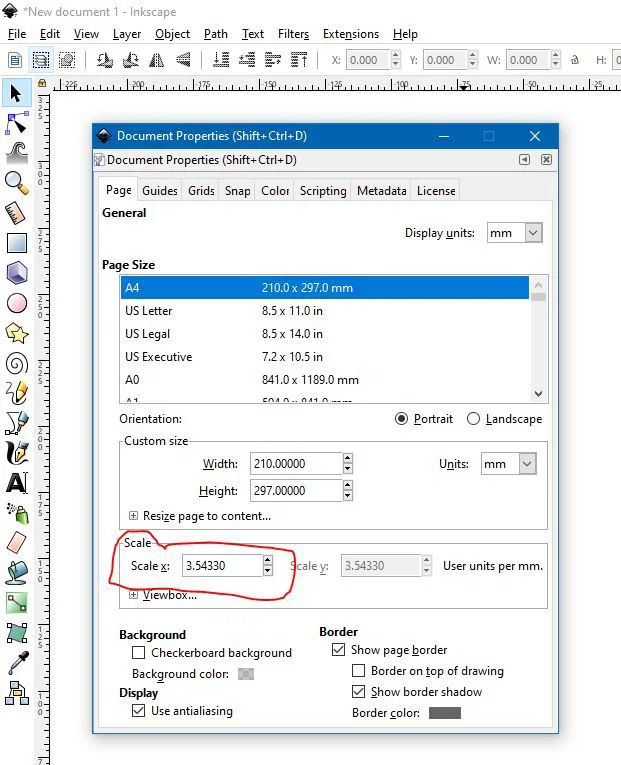
- Nếu robot vẽ lệch 45 độ, hãy đọc kỹ mô tả này. Nếu vẫn gặp vấn đề, hãy tham khảo hướng dẫn tại: https://github.com/grbl/grbl/wiki/Compiling-Grbl
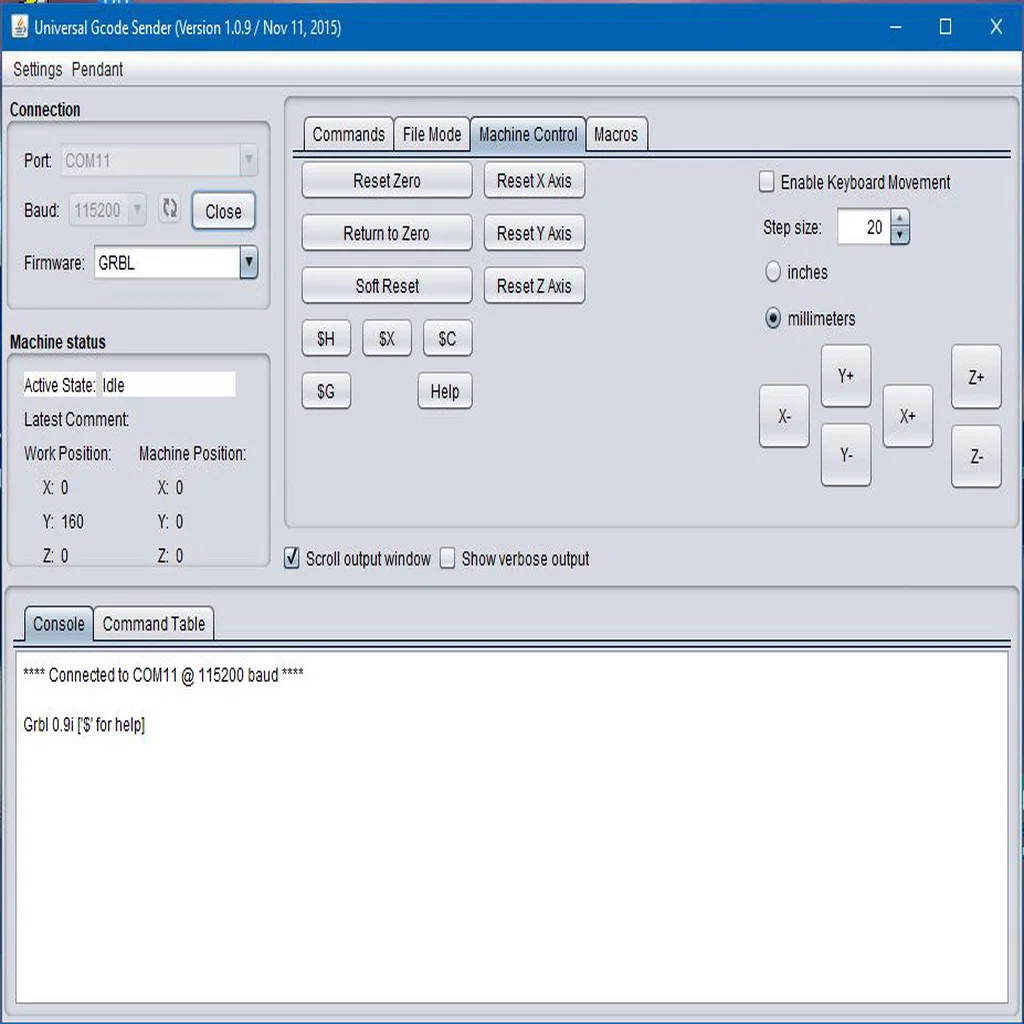
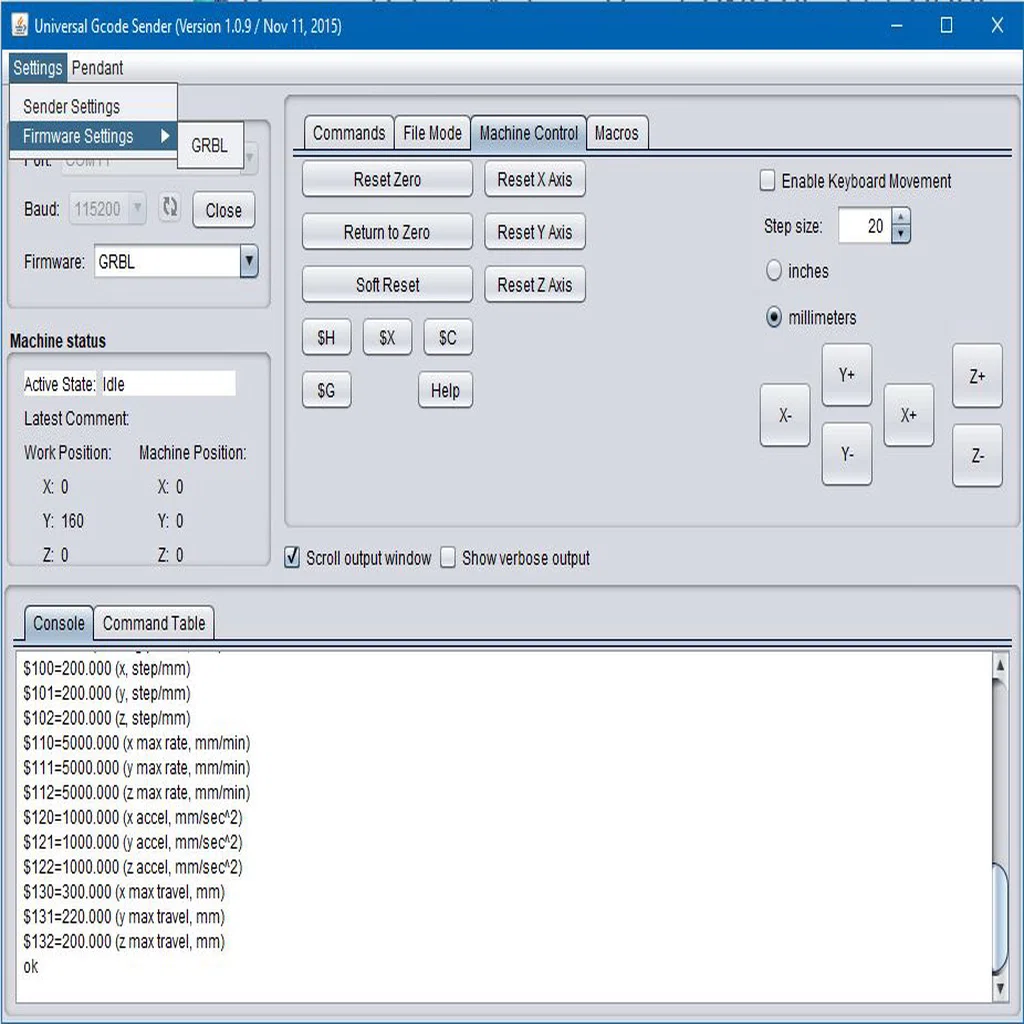
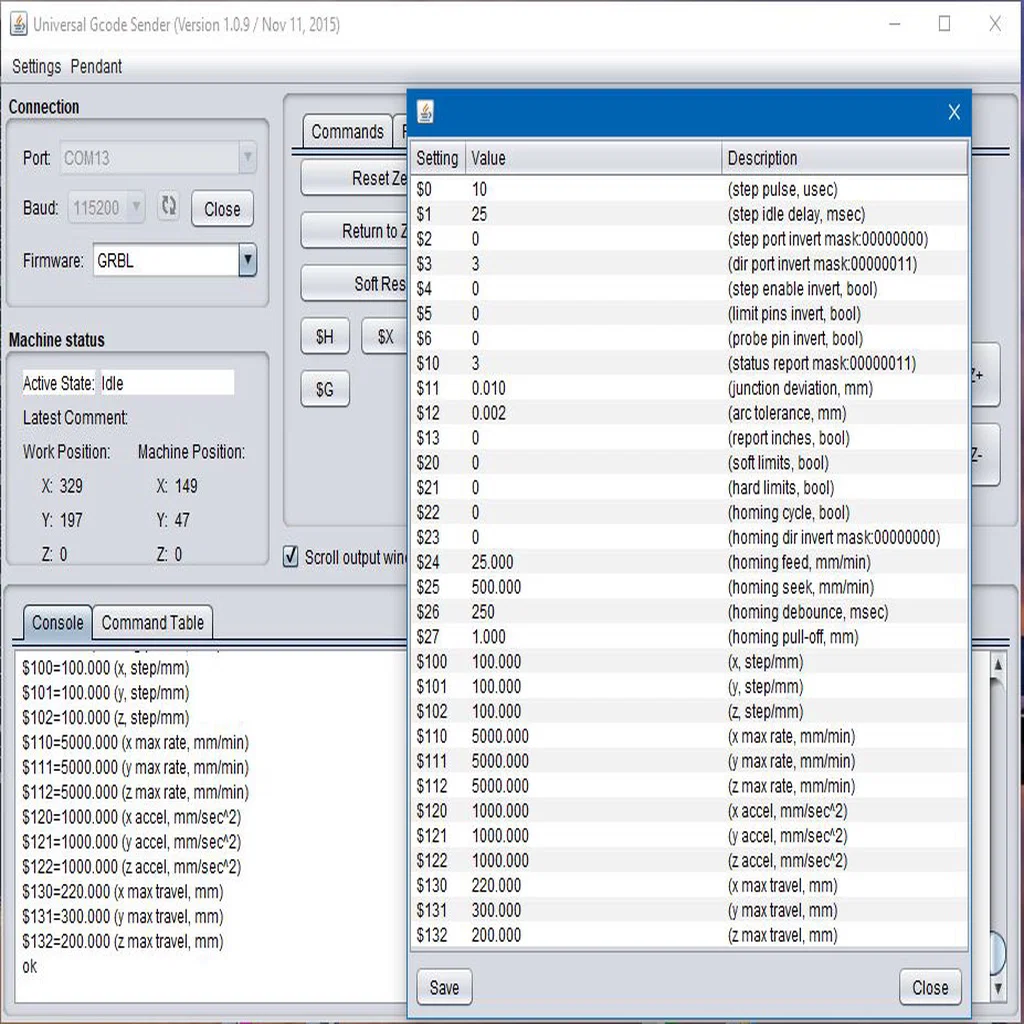
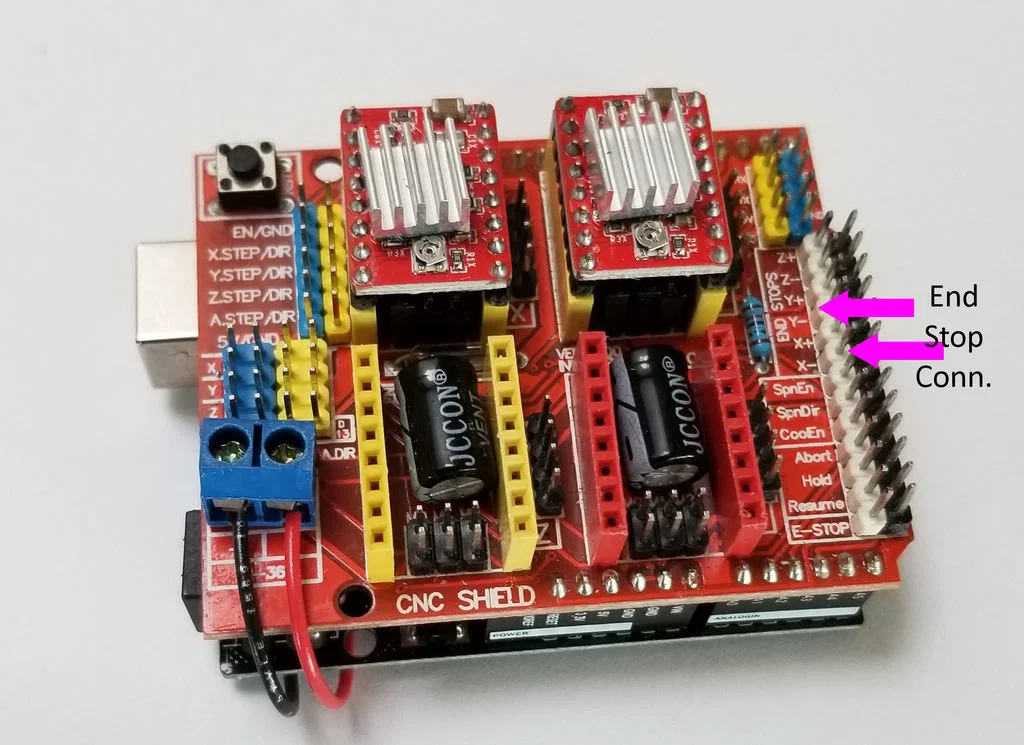
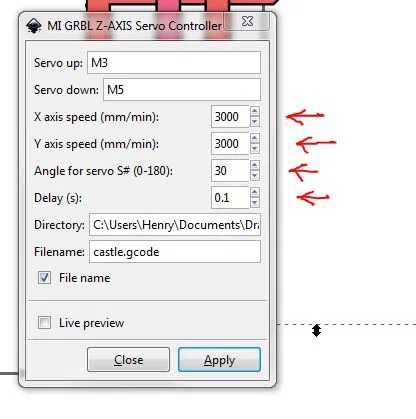
- Đảm bảo đã thiết lập thông số GRBL trong Universal G-Code Sender và đưa trục X, Y về điểm gốc (zero).
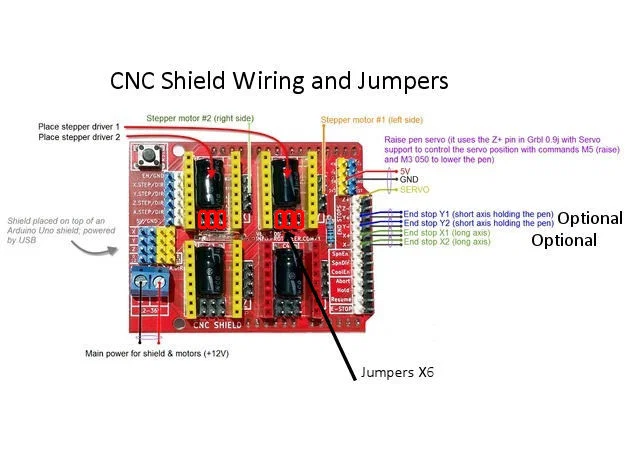
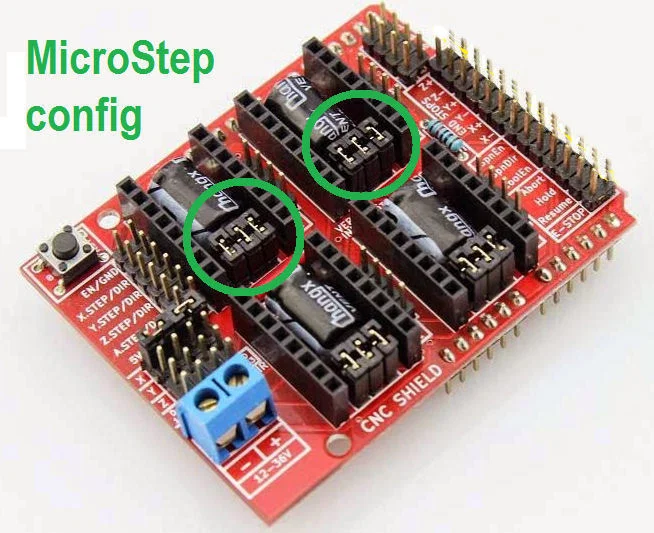
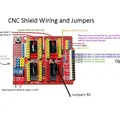
- Đảm bảo đã gắn các jumper (chân cắm) bên dưới driver động cơ bước.
- Đảm bảo đã điều chỉnh dòng điện cho driver phù hợp với loại bạn đang dùng.
- Nếu bạn thay đổi phiên bản GRBL hoặc Inkscape, tôi không thể hỗ trợ kỹ thuật cho thiết lập mới của bạn.
Bạn bắt buộc phải đọc kỹ mô tả và tài liệu để robot hoạt động chuẩn xác. Chúc bạn có những giây phút trải nghiệm thú vị!
Thông tin mới cho DrawBot Phiên bản 1.1
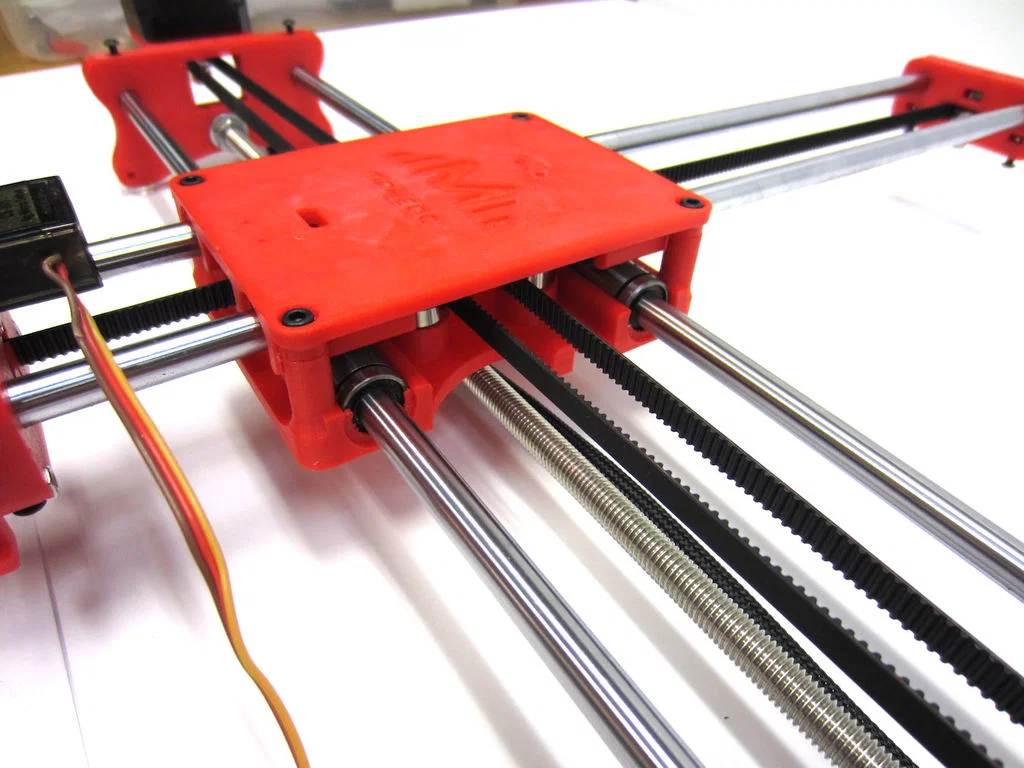
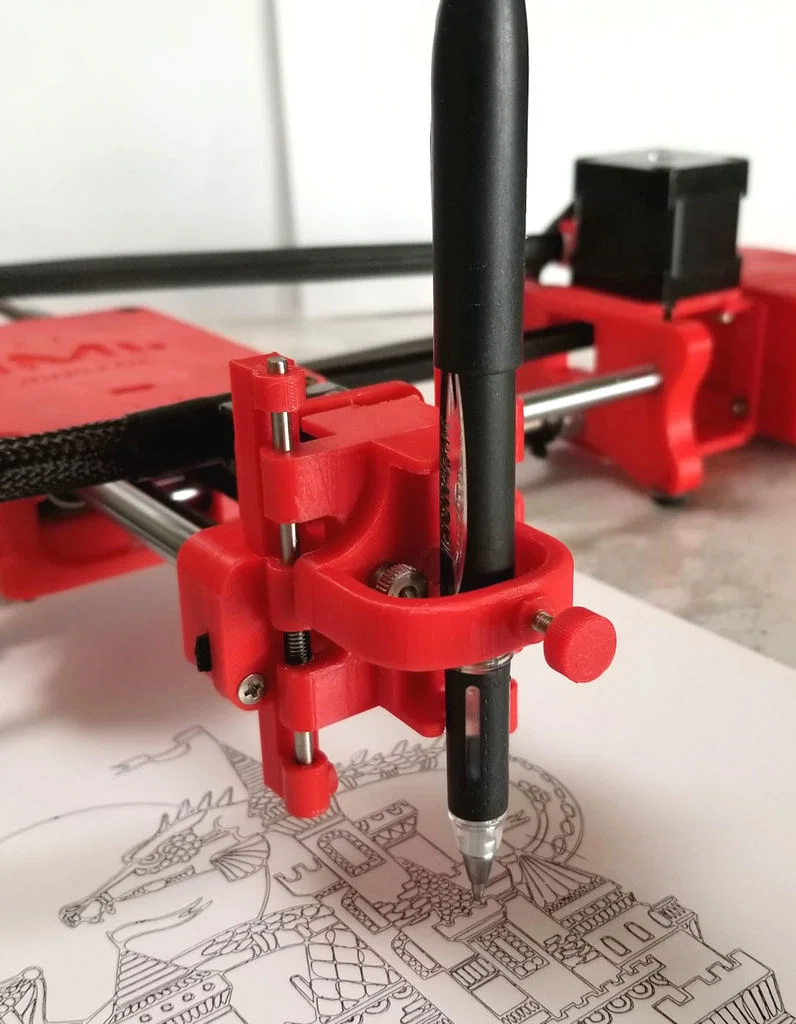
Tôi đã cải tiến nhiều bộ phận nhưng tất cả đều tương thích với các phần cũ:
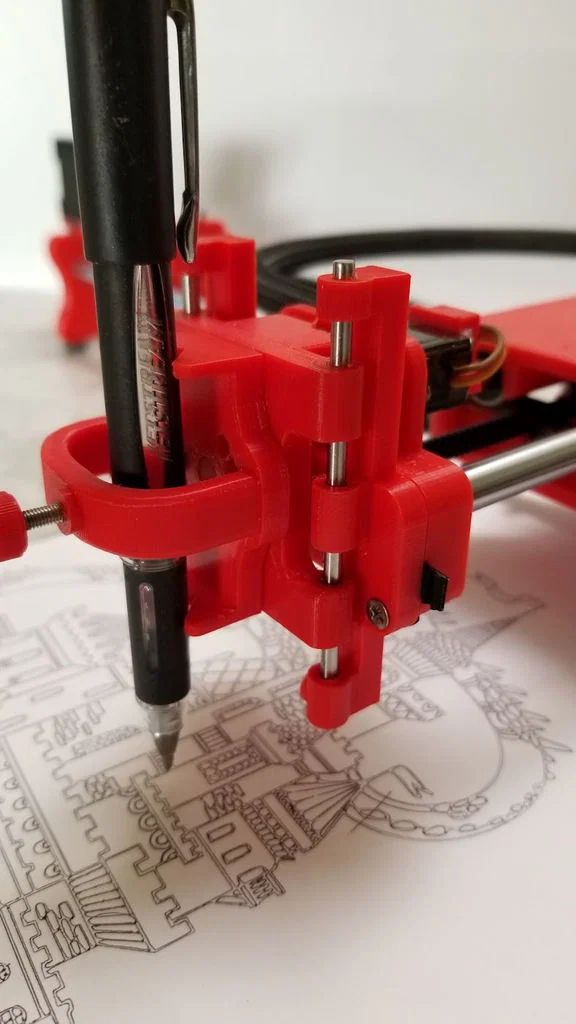
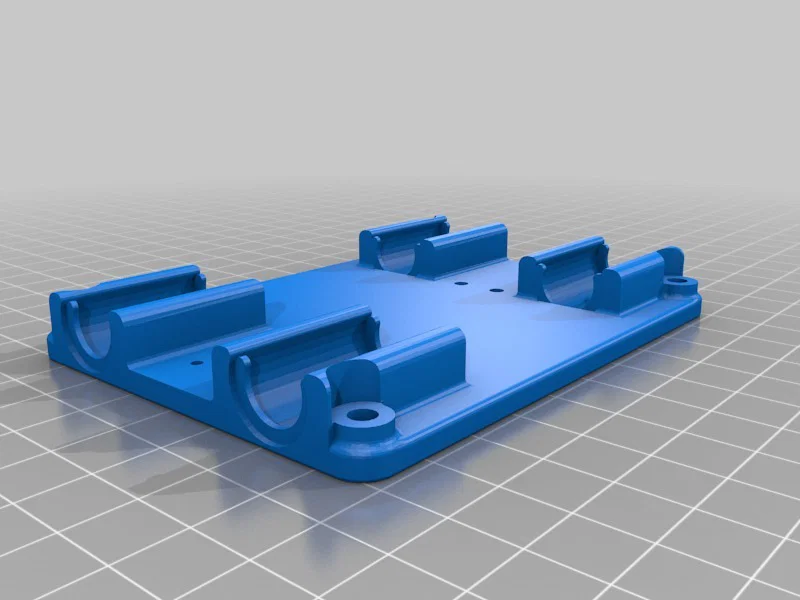
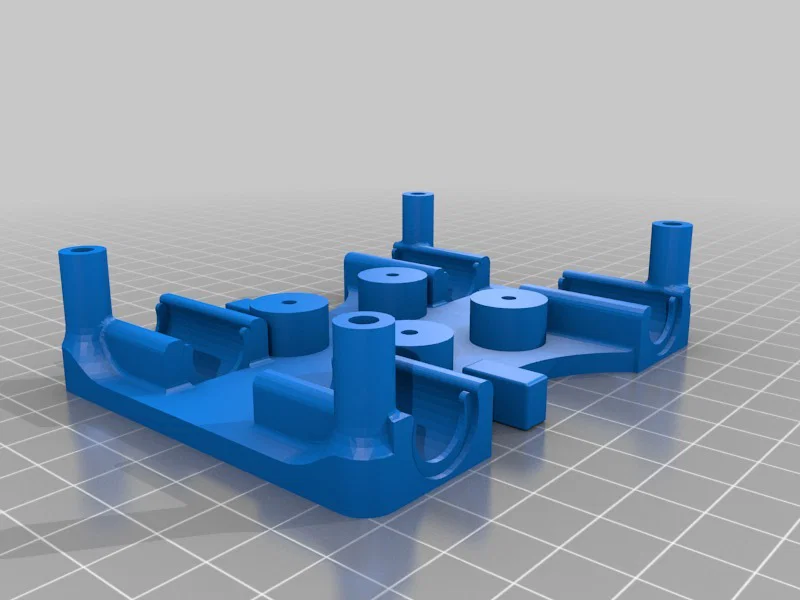
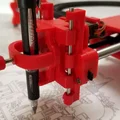
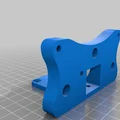
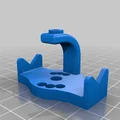
- Giá giữ bút mới cứng cáp hơn nhưng vẫn giữ được khả năng đặt bút ở các góc.
- Cơ chế trượt bút mạnh mẽ hơn.
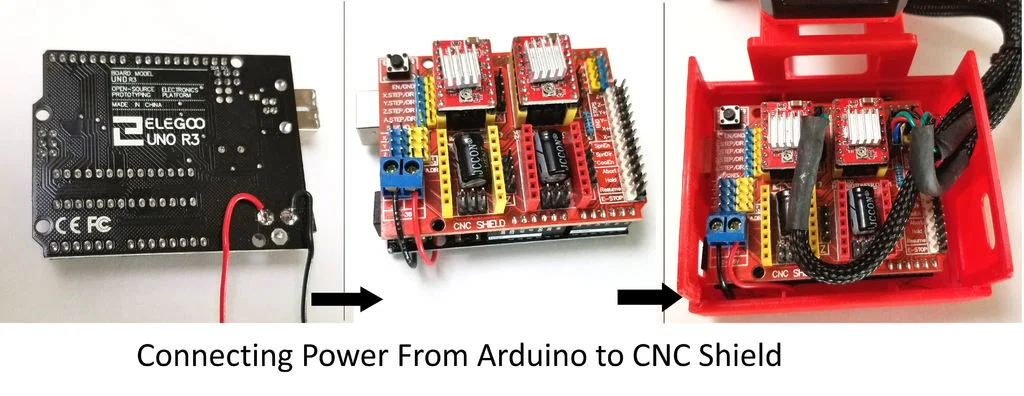
- Hướng dẫn mới về cách cấp nguồn từ jack Arduino sang CNC Shield vì chân Vin của Arduino không chịu được quá 1A.
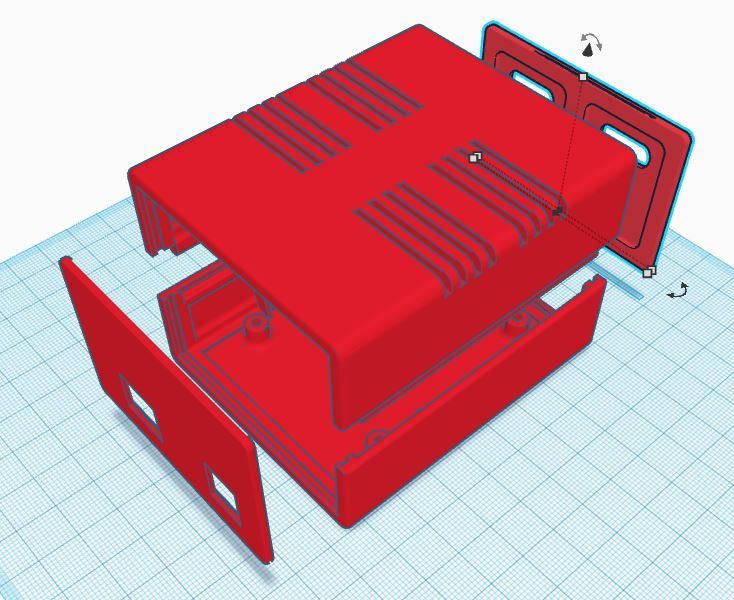
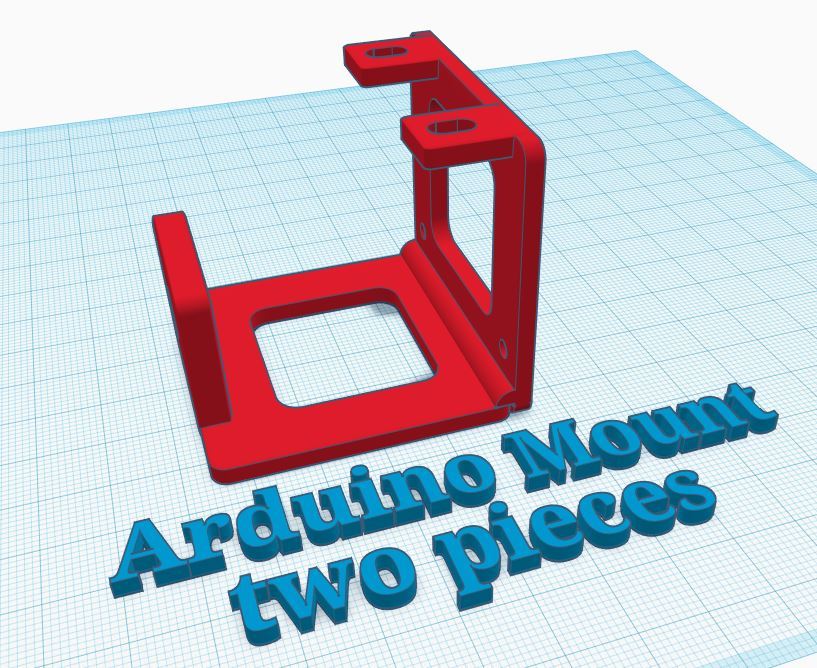
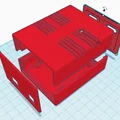
- Giá đỡ mới để gắn vỏ Arduino vào cạnh phải của robot.
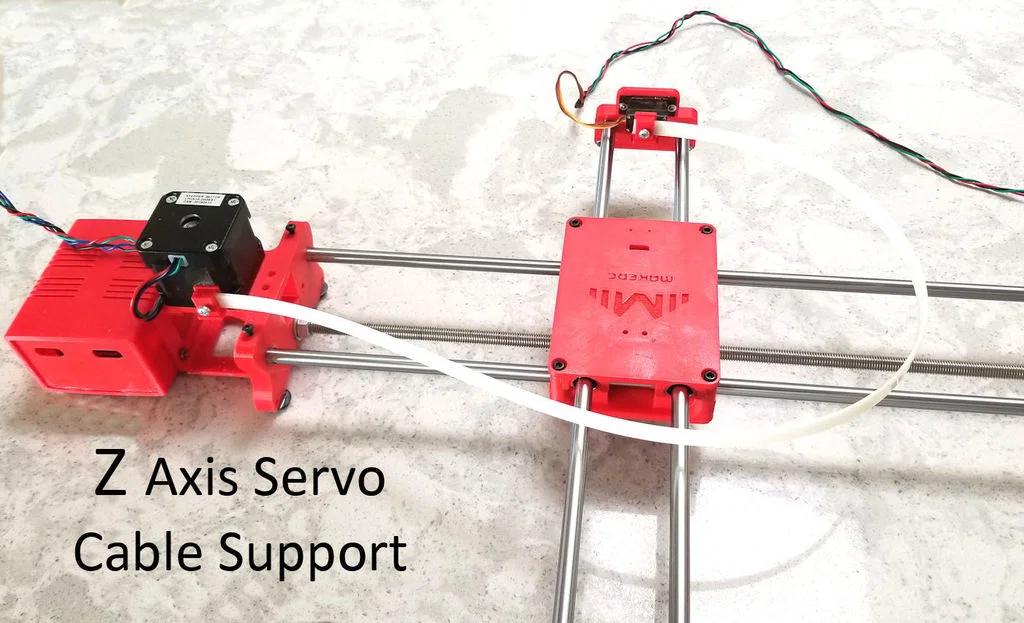
- Hệ thống quản lý dây cáp sử dụng dây rút 500mm x 9mm.
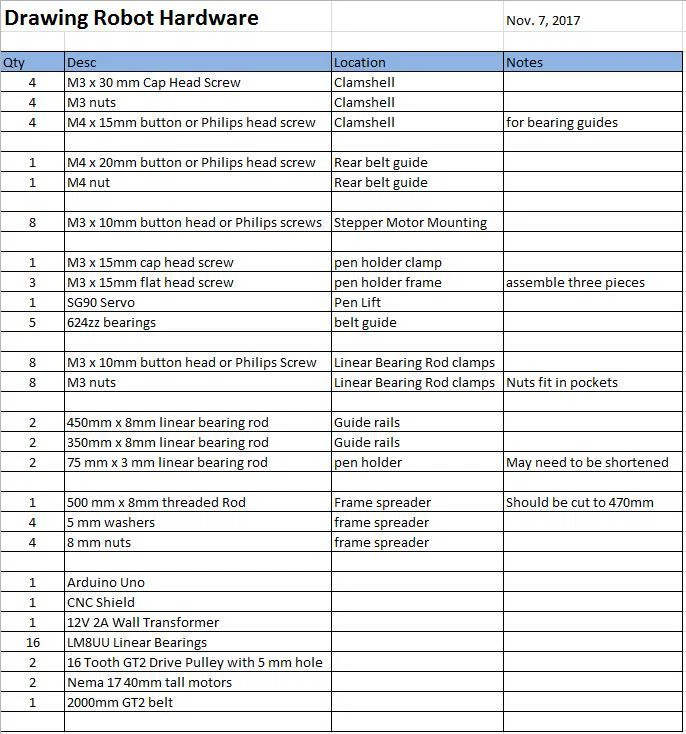
Tài liệu hướng dẫn lắp ráp nằm trong phần Files. Cảm ơn Jonathan K đã soạn thảo tài liệu này.
Thông số in
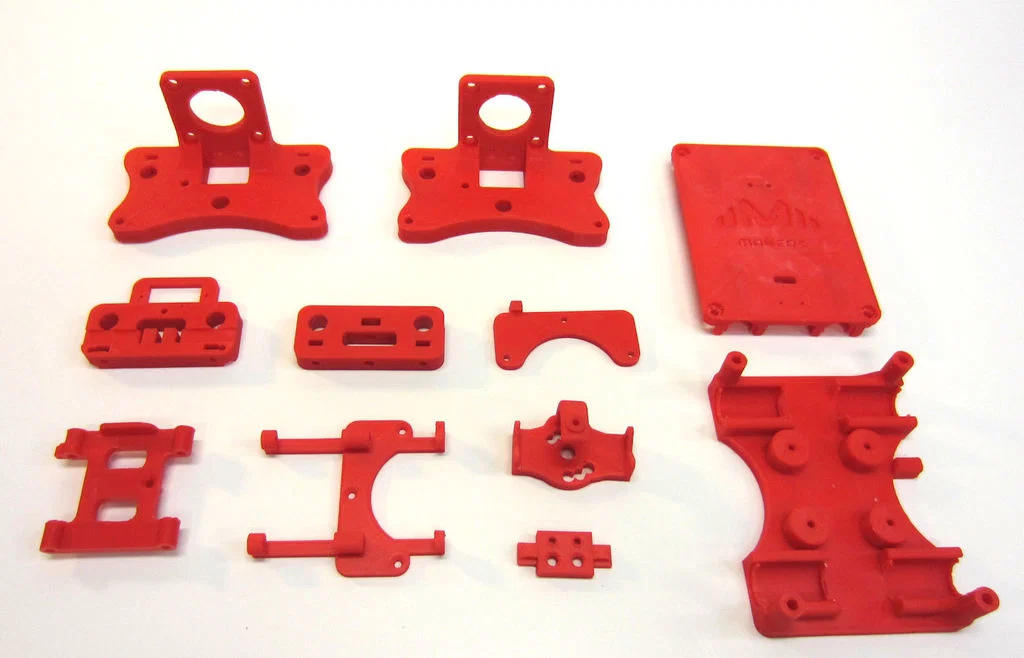
Máy in: HyperCube Rafts: Không Supports: Không Độ phân giải: 0.1mm Infill: 75% Chất liệu: HatchBox PLA
Lưu ý: PLA rất phù hợp cho dự án này. Tôi in ở nhiệt độ 200°C trên bề mặt BuildTak. Không cần dùng raft hay brim. Tôi khuyên chỉ nên dùng support cho giá giữ bút và tấm đỡ trục Z.
Giấy phép

File mô hình




















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!