Birb – Cảm biến chất lượng không khí hình chim hoàng yến

Birb là phiên bản open-source, in 3D lấy cảm hứng từ Canairi CO2 sensor: dùng linh kiện chuẩn Feather, cảm biến SGP40/AHT20 (hoặc BME680), gửi dữ liệu qua MQTT để tích hợp HomeAssistant. Có hướng dẫn lắp và sơ đồ đi dây.



Mô tả
Birb là “đỉnh của chóp” luôn!
Vài năm trước, mình tình cờ biết tới cảm biến chất lượng không khí “Canairi” trên Kickstarter. Mình rất thích thiết kế ngầu của nó nhưng lại thấy hơi thiếu về mặt tính năng (và dùng những cảm biến thật sự không phù hợp/không có nhiều giá trị với nhu cầu của mình). Vậy nên mình bắt tay vào thiết kế một bộ vỏ (enclosure) có thể in 3D, dùng linh kiện phổ thông dễ mua và có thể chia sẻ dữ liệu cảm biến qua MQTT.
Hướng dẫn lắp chi tiết hơn bạn có thể xem trên blog của mình ở đây!
Để làm Birb, bạn sẽ cần:
- Tất cả các phần đã in 3D (bạn có thể chọn loại backplate bạn muốn: có hoặc không có chân đế)
- Microcontroller chuẩn Feather (lý tưởng là có wifi. Mình dùng Unexpected Maker Feather ESP32-S2). Nếu muốn dùng code của mình, bạn sẽ cần setup với CircuitPython.
- SG90 Micro Servo
- Adafruit SGP40 Mox Gas Sensor (bạn có thể dùng SGP30 nhưng cần chỉnh code)
- Adafruit AHT20 Temp/Humidity Sensor (hoặc BME680)
- 2 sợi cáp QT/ST connector ngắn
- 3 x đai ốc (nuts) M3 và ốc máy (machine screws)
- Adafruit USB-C breakout board
- Dây silicon. Mỏ hàn, thiếc hàn, v.v.


Ghi chú khi lắp:
Bạn có thể lấy code CircuitPython từ Github của mình (link sẽ có sớm)
Đừng quên thêm thông tin mạng của bạn, v.v. vào file secrets.py
Bạn không thể nạp chương trình cho board thông qua USB-C breakout, cổng này chỉ cấp nguồn chứ không truyền dữ liệu. Bạn có thể thay bằng Micro-USB nếu bạn thích.
Mình đã in thử cả chục phiên bản để canh chuẩn phần push-fit cho các board, tuy nhiên mỗi lô board có thể hơi khác nhau nên bạn có thể cần dùng một chút sticky-tac để giữ chúng cố định.
Để publish dữ liệu, mình gửi qua MQTT tới server HomeAssistant của mình chạy Mosquito MQTT, tuy nhiên bạn có thể dùng bất kỳ MQTT server nào bạn thích (ví dụ Adafruit.io). Hiện dữ liệu được publish mỗi 10 giây, nhưng đổi trong code rất dễ.
Ngoài nắp lưng (back cover) ra thì đa số các phần được cố định bằng một chút keo 502 (superglue) để chắc chắn hơn.
Cứ thoải mái thay cảm biến theo nhu cầu của bạn nha!
Khác với Canairi bản gốc, Birb không được thiết kế để chạy bằng pin. Tuy vậy các board Feather CÓ sẵn đầu JST và mạch sạc pin, nên bạn có thể “độ” pin Lipo vào trong vỏ, và nó sẽ sạc qua cổng USB phía dưới.
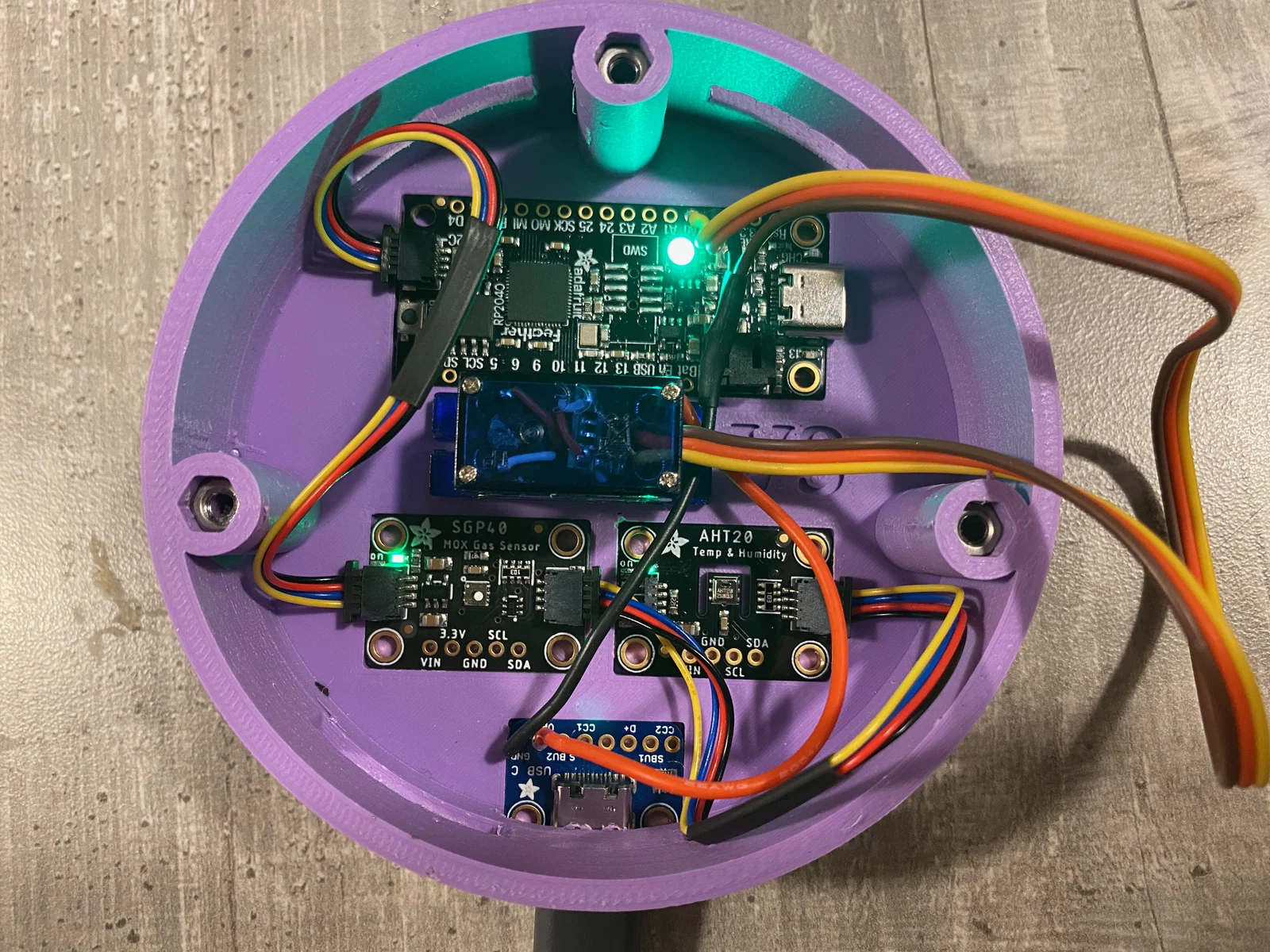
Xem ảnh bên dưới để biết cách đi dây:

Giấy phép

File mô hình









Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!