Cơ cấu lực không đổi (Constant-Force Mechanism)

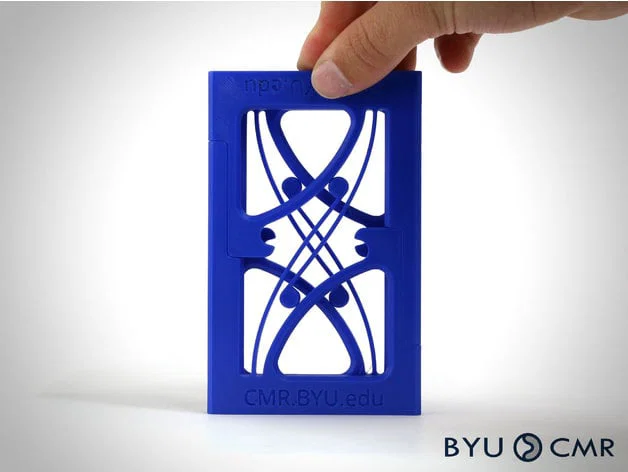
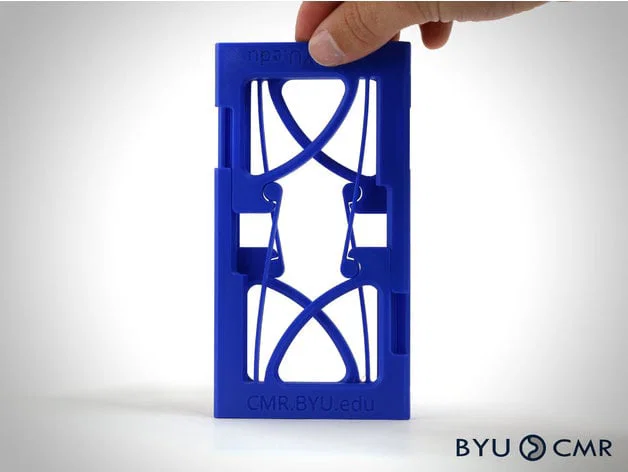
Mẫu Constant-Force Mechanism dùng cấu hình crank-slider compliant mechanism với nested cams để tạo lực gần như không đổi trong một dải hành trình. Bản tải về đã đơn giản hoá để dễ in 3D, in 4 chi tiết rồi bấm khớp lắp ráp.





Mô tả
Summary
Cơ cấu này được thiết kế để minh hoạ một constant-force mechanism (cơ cấu lực không đổi), tức là tạo ra lực gần như không đổi trong một dải hành trình nhất định. Thiết kế dùng cấu hình crank-slider compliant mechanism với nested cams. Cơ cấu có một lò xo dạng cantilever vừa bị uốn vừa trượt theo một cam (thành phần cứng). Khi cantilever spring bị uốn, sẽ sinh ra lực cản. Quỹ đạo đã được định trước của thành phần cứng là hàm của độ dịch chuyển, độ uốn và lực cản nhằm tạo ra lực không đổi. Cơ cấu sẽ bù lại sự thay đổi lực cản từ lò xo bằng cách thay đổi mechanical advantage; trong đó mechanical advantage được định nghĩa là tỉ số giữa lực đầu ra và lực đầu vào của cơ cấu (xem thêm chi tiết bên dưới).
Phiên bản cho tải về đã được đơn giản hoá để dễ in 3D và lắp ráp, nhằm thể hiện ý tưởng tổng thể, chứ chưa phải một constant-force mechanism tối ưu. Bản in 3D này là một chi tiết duy nhất, có thể in 4 lần và bấm khớp với nhau dễ dàng, không cần thêm vật liệu nào khác như bu-lông, bearing, v.v.
Assembly
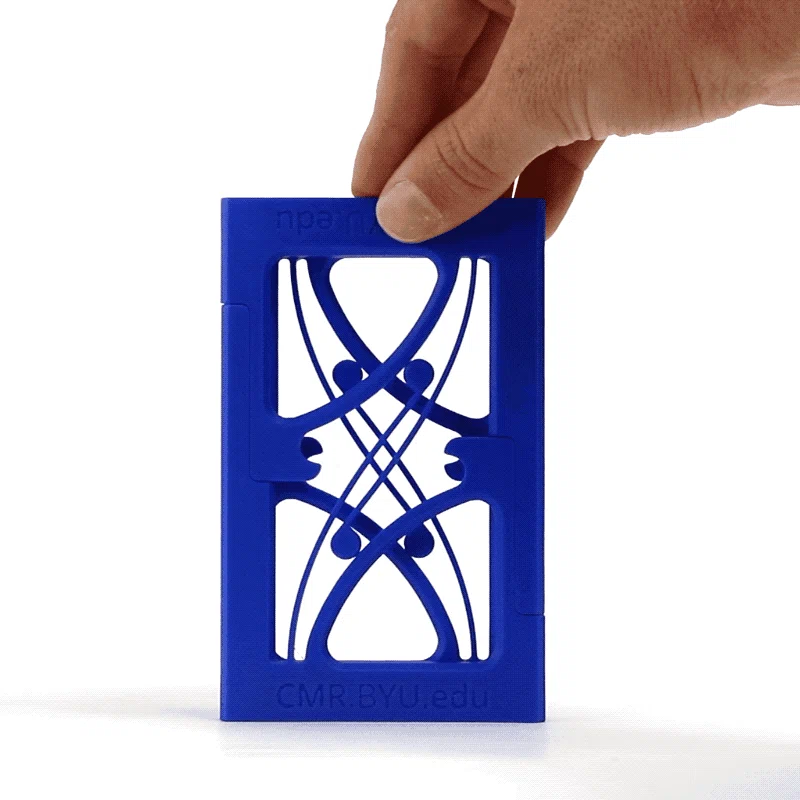
Bạn có thể cần kích hoạt (actuate) cơ cấu nhiều lần trước khi chuyển động mượt hơn và giảm ma sát do các lỗi bề mặt từ quá trình in 3D.
Step 1: In chi tiết 4 lần

Step 2: Bấm khớp các chi tiết lại thành 2 cụm

Step 3: Ghép và canh thẳng các slider

Step 4: Bóp các compliant beams và nối các cụm lại

Application
Ứng dụng gồm có đầu nối điện, thiết bị tập luyện, thiết bị vi mô, và end-effector cho robot.
Máy tập Constant-Force
Máy tập Constant-Force này mô phỏng lực không đổi của “tạ rời” (free weights) trong thiết bị gym, nhưng dùng các phần tử compliant trong cấu hình crank-slider thay thế. Máy tái tạo được lợi ích và “cảm giác” như tập tạ rời mà không phải vướng bất tiện và rủi ro của tạ nặng. Một số thiết bị tập khác dùng chồng tạ hoặc lò xo để tạo lực cản; tuy nhiên chồng tạ thì nặng và cồng kềnh, còn cơ cấu lò xo truyền thống thì không cho lực cản không đổi (tức lực cản tăng khi dịch chuyển tăng).
Máy này tạo lực gần như không đổi trên một khoảng hành trình hoặc độ uốn nhất định.
Ưu điểm của máy tập constant-force gồm: 1) “Cảm giác” như tạ rời, 2) chi phí thấp hơn, 3) nhẹ hơn, 4) gọn hơn, 5) an toàn, 6) đơn giản.




Constant-Force End-Effector
Thiết kế gồm bốn lò xo nén constant-force, một khung (cage), và hai cụm piston. Thành phần then chốt của thiết kế là các lò xo constant-force. Cấu hình cụ thể này gồm một đoạn dài linh hoạt (flexible segment) được chốt (pinned) với một đoạn cứng (rigid segment), với hai đầu đối diện của đoạn linh hoạt và đoạn cứng lần lượt được cố định và chốt.
Khi được gắn như một khớp nối (coupling device) giữa tay máy robot và end-effector, có thể áp một lực không đổi lên bề mặt. Ví dụ, robot dùng cơ cấu này có thể rạch (score) một tấm kính mà không làm vỡ, ngay cả khi có sai lệch căn chỉnh đáng kể giữa quỹ đạo dụng cụ của robot và tấm kính.


Tiếp điểm điện Constant-Force
Các nghiên cứu cho thấy 85% mọi sự cố điện trên ô tô là do vấn đề về độ tin cậy tiếp xúc (contact integrity), và hơn 70% sự cố phần cứng máy tính cũng có thể truy về các vấn đề tiếp xúc. Tiếp điểm điện constant-force gồm một slider bằng polypropylene và hai miếng chèn thép lò xo nhỏ. Sự kết hợp giữa các đoạn linh hoạt và hình học của slider giúp slider tạo ra lực không đổi, từ đó hứa hẹn cải thiện hiệu năng của tiếp điểm điện.

Learn More
Compliant Mechanisms
Mechanism là một thiết bị cơ khí dùng để truyền hoặc biến đổi chuyển động, lực hoặc năng lượng. Compliant mechanisms đặc biệt ở chỗ chúng hoạt động nhờ sự uốn (deflection) của các phần tử linh hoạt. Điều này khác với cơ cấu thân cứng truyền thống, vốn tạo chuyển động bằng các chi tiết rời rạc được liên kết qua các khớp chuyển động.
Ưu điểm của compliant mechanisms gồm giảm chi phí và có lợi thế hiệu năng so với cơ cấu thân cứng. Vì chuyển động được tạo ra từ sự uốn của phần tử linh hoạt, chúng có ít chi tiết hơn, mài mòn ít hơn, giảm số lượng chi tiết và đạt độ chính xác cao hơn.
Những ưu điểm này hữu ích cho việc phát triển máy tập constant-force, vì compliant mechanisms có thể đạt hiệu năng mong muốn với ít chi tiết hơn và trọng lượng thấp hơn so với các phương án khác.
Constant-Force Mechanisms
Nguyên lý nền tảng của constant-force mechanisms là bù lại lực cản thay đổi của lò xo khi bị uốn bằng cách dùng mechanical advantage thay đổi theo hành trình. Khi áp dụng compliant mechanisms theo cấu hình crank-slider, mechanical advantage của hệ sẽ thay đổi theo độ dịch chuyển, từ đó tạo ra lực cản gần như không đổi.
Khác với lò xo tuyến tính thông thường (lực tăng khi hành trình tăng), “lò xo” constant-force kết hợp hiệu ứng mechanical advantage và năng lượng biến dạng (stored strain energy) của các phần tử linh hoạt để đạt lực đầu ra gần như không đổi trên một dải hành trình lớn.

Thiết kế này được phát triển bởi Compliant Mechanisms Research Group (CMR) thuộc Brigham Young University (BYU). Theo dõi tụi mình tại @byucmr trên Instagram hoặc ghé trang BYU Compliant Mechanisms Research (CMR) để tìm hiểu thêm về compliant mechanisms.
Ngoài ra còn có một khoá học online miễn phí về thiết kế compliant mechanism, do TS. Jonathan B. Hopkins, Ph.D., UNLC.
https://www.youtube.com/watch?v=S4o6-wXmwaQ&list=PLWeErkRyxkhJv-ynwCvM0XxKusTJJQzJl
Technical Information
Để xem thông tin kỹ thuật chuyên sâu, tham khảo các ấn phẩm sau:
Tolman, K.A., Merriam, E.G., và Howell, L.L., “Compliant Constant-Force Linear-Motion Mechanism,” Mechanism and Machine Theory, Vol. 106, pp. 68–79., DOI: 10.1016/j.mechmachtheory.2016.08.009, 2016,
Boyle, C., Howell, L.L., Magleby, S.P., và Evans, M.S., “Dynamic Modeling of Compliant Constant-Force Compression Mechanisms,” Mechanism and Machine Theory, Vol. 38, No. 12, pp. 1469-1487, 2003.
Weight, Brent, “Development and Design of Constant-Force Mechanisms,” M.S. Thesis, Brigham Young University, December 2001.
Để tìm hiểu thêm về compliant mechanisms nói chung, xem trang BYU Compliant Mechanisms Research (CMR) hoặc các sách: Compliant Mechanisms, Handbook of Compliant Mechanisms
Intellectual Property
Các file in 3D có thể tải về tại đây được phép sử dụng, chỉnh sửa và trải nghiệm cho mục đích phi thương mại. Để cấp phép công nghệ này cho các ứng dụng thương mại, vui lòng liên hệ:
BYU Technology Transfer Office
3760 Harold B. Lee Library
Brigham Young University
Provo, UT 84602
Phone: (801) 422-6266
https://techtransfer.byu.edu/contact
Patent Information
“Substantially Constant-Force Exercise Machine,” Howell, L.L. và Magleby, S.P., U.S. Patent No. 7,060,012, cấp ngày 13 tháng 6, 2006.
“Constant Force Apparatus and Method,” Weight, B.L., Mattson, C.A., Magleby, S.P., Howell, L.L., và Brown, B.J., U.S. Patent No. 6,945,800, cấp ngày 20 tháng 9, 2005.
“Compliant Constant-Force Mechanism and Devices Formed Therewith,” Midha, A., Murphy, M.D., và Howell, L.L., U.S. Patent No. 5,649,454, cấp ngày 22 tháng 7, 1997.
Về câu hỏi cấp phép, vui lòng liên hệ Spencer Rogers ([email protected], (801) 422-3676)
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!