Cánh tay gắp robot 2 ngón cho hệ thống Pick and Place

Bạn đang tìm kiếm một bộ phận gắp robot (robotic gripper) hiệu quả cho hệ thống 3 trục của mình? Mẫu thiết kế Greifarm 2-fache Ausführung này là giải pháp hoàn hảo cho các tác vụ Pick and Place tự động. Với kết cấu cơ khí được tính toán tỉ mỉ, mô hình giúp robot thực hiện việc di chuyển và gắp các khối vật liệu một cách chính xác, an toàn và chuyên nghiệp. Sản phẩm này không chỉ giúp bạn tiết kiệm chi phí so với các linh kiện công nghiệp, mà còn cung cấp khả năng tùy biến cao, dễ dàng thay đổi kích thước và cấu hình tùy theo mục đích sử dụng. Đây là một công cụ lý tưởng cho những người đam mê chế tạo robot, tự động hóa và các dự án kỹ thuật tại nhà, mang đến sự ổn định và hiệu suất tuyệt vời cho mọi ứng dụng lắp đặt.




Mô tả
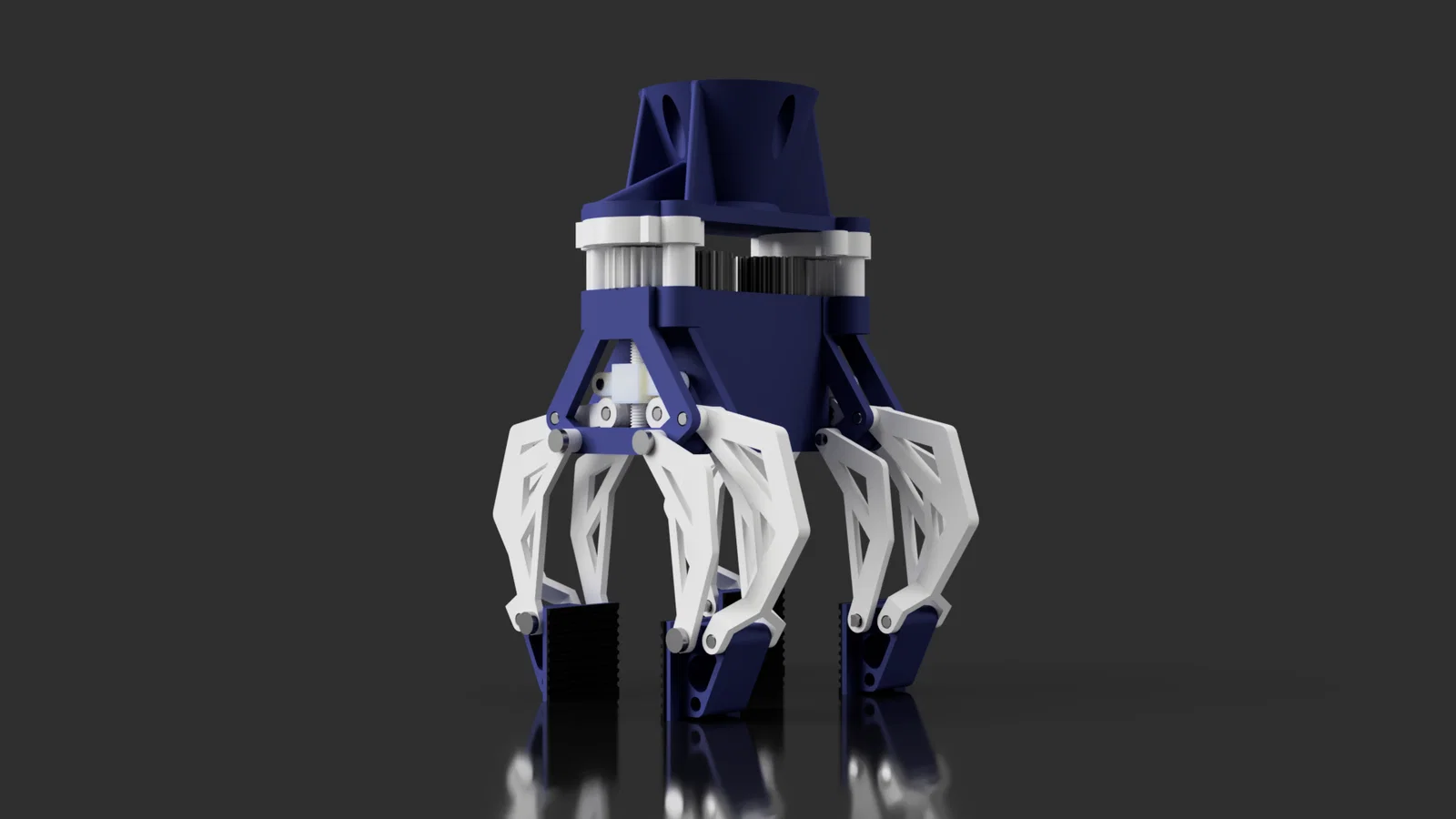
Cánh tay gắp robot 2 ngón (Greifarm 2-fache Ausführung)
Cánh tay gắp robot (robotic gripper) này là một giải pháp thiết kế chuyên biệt, được phát triển dành riêng cho các quy trình vận hành "Pick and Place" (gắp và đặt) trên hệ thống robot 3 trục. Với kết cấu cơ khí tinh gọn, nó cho phép robot của bạn thao tác chính xác và linh hoạt hơn khi cần di chuyển các khối vật liệu trong không gian làm việc. Đây là một mảnh ghép quan trọng cho bất kỳ ai đang mày mò chế tạo robot tự động hóa trong các dự án DIY hoặc môi trường phòng thí nghiệm.
Điểm nổi bật của thiết kế này nằm ở cơ cấu chuyển động cơ khí thông minh, giúp tối ưu hóa lực kẹp mà vẫn giữ được độ ổn định cần thiết. Việc sử dụng in 3D để tạo ra các bộ phận giúp bạn có thể dễ dàng thay đổi kích thước hoặc tùy chỉnh vị trí gắn kết cho phù hợp với đầu dò của robot hiện có. Khả năng gắp các khối vật liệu giúp tự động hóa các tác vụ lặp đi lặp lại một cách hiệu quả, giảm bớt công sức thủ công cho người dùng.
Dưới đây là một số thông tin hữu ích giúp bạn triển khai in và lắp ráp model này một cách thành công:
- Thiết kế tối ưu cho các thao tác gắp vật thể hình khối, đảm bảo độ bám chắc chắn.
- Cấu trúc cơ khí cho phép điều chỉnh hành trình gắp linh hoạt dựa trên yêu cầu thực tế của robot.
- Tips in 3D: Bạn nên sử dụng vật liệu PETG hoặc ABS để đảm bảo độ bền cơ học và chịu được lực tác động tốt hơn so với PLA trong môi trường vận hành.
- Lưu ý về Layer Height: Nên in với layer height từ 0.16mm đến 0.2mm để đảm bảo các khớp nối chuyển động mượt mà và chính xác.
- Nên sử dụng cấu trúc hỗ trợ (support) ở những vị trí có độ nhô ra lớn để đảm bảo bề mặt chi tiết không bị võng.
- Kiểm tra kỹ các lỗ bắt vít và trục xoay sau khi in, cần đảm bảo chúng được vệ sinh sạch sẽ để cơ cấu không bị kẹt khi vận hành.
Tổng kết lại, đây là một lựa chọn tuyệt vời cho các dự án robot tự động hóa cần một bộ phận kẹp tin cậy. Bằng cách kết hợp các linh kiện in 3D này với động cơ phù hợp, bạn có thể nhanh chóng xây dựng hệ thống Pick and Place của riêng mình mà không cần tốn quá nhiều chi phí cho các linh kiện công nghiệp đắt đỏ.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình














Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!