Hercules – Cánh tay robot (Robotic Arm) mô-men xoắn cao in 3D

Hercules the Robotic Arm là cánh tay robot in 3D lực khỏe (high torque), dùng 5 servo 12V 150kg/cm 270° cùng extrusion 2020. Có hướng dẫn vật liệu và print settings để in chắc, hoạt động mượt.
470
Lượt Xem
2
Lượt Thích
53
Lượt Tải
Cập Nhật May 02, 2026

Mô tả
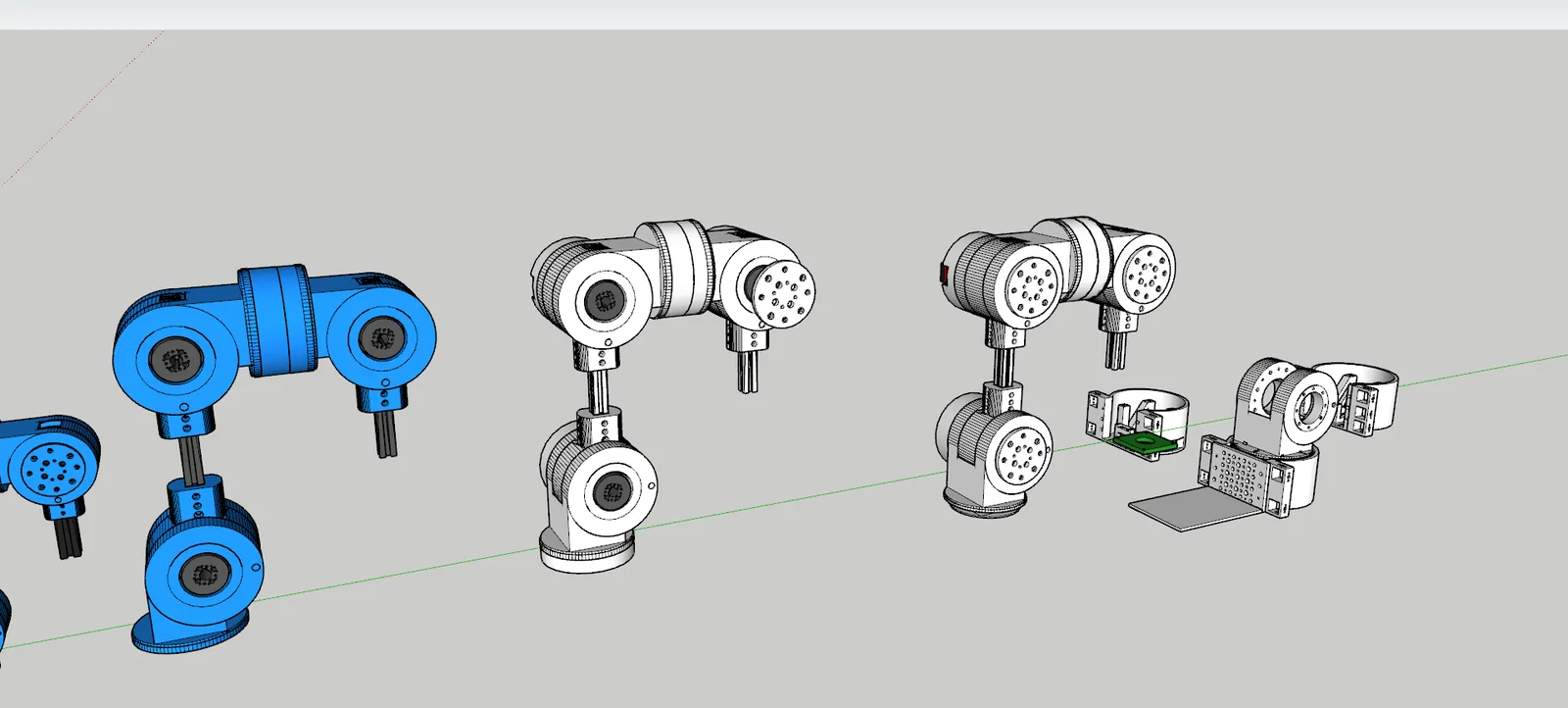
Đây là Hercules, một cánh tay robot mình tự làm.
Và đúng vậy, nó có thể nâng được một chai bia ngon lành ;)
Hercules Robot Arm đang hoạt động:
Vật liệu mình dùng:
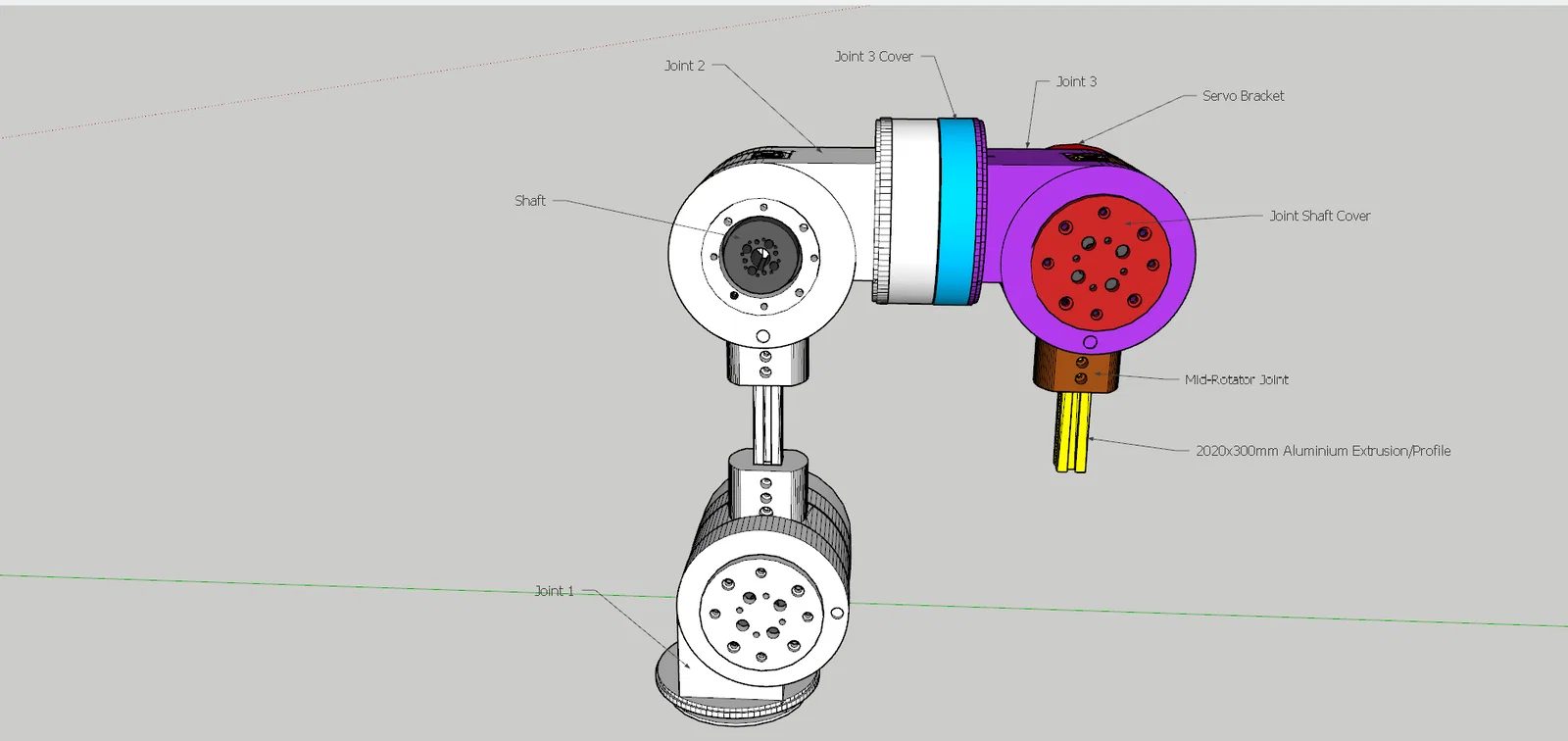
- Dùng năm servo 12V 150kg/cm 270 độ mình mua từ AliExpress (Nhớ chọn servo loại 270 độ, không là khớp sẽ không đạt đủ dải chuyển động. Servo 80kg/cm cũng xài được, nhưng lực (torque) của tay sẽ yếu hơn).
- Mình dùng mấy cái bearing này (50x65x7mm) (Lưu ý: 2RS có phớt cao su, ZZ thì không).
- Một ít ốc M2.5x12mm & Threaded Inserts
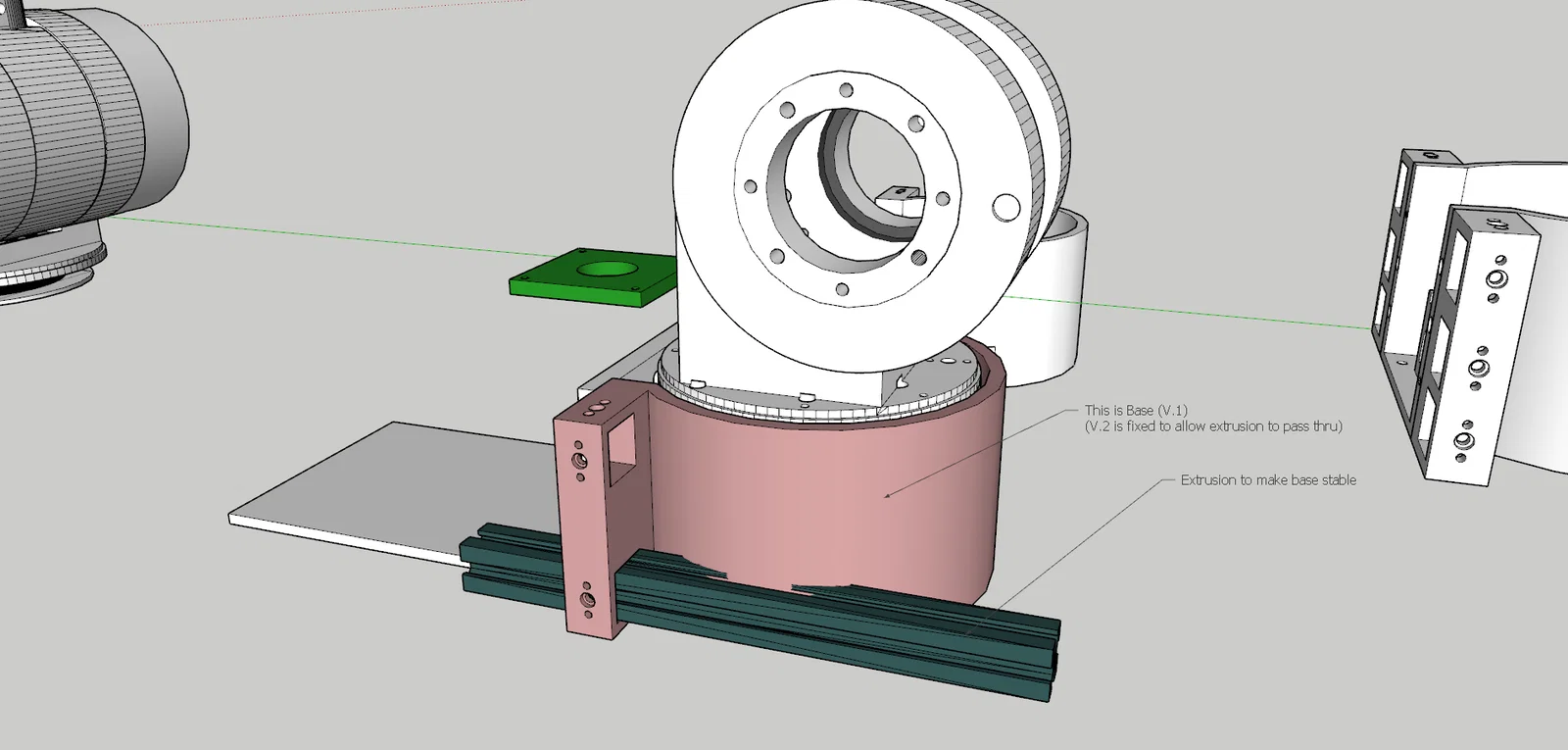
- Bộ 4 thanh 2020x300mm Extrusion
- T-Nut M3 để cố định Extrusion
- ốc M3 (dài 6 hoặc 8mm là ổn)
- M3 Threaded inserts (mình thích mấy gói combo nhiều size)
- Metal 18T Circular Servo Horn (nếu bạn chưa có. Tùy nơi mua servo mà đôi khi sẽ kèm sẵn)
- Ổ bi mâm xoay Lazy Susan 3" (mình mua ở Princess Auto)
- Mình dùng Pololu Maestro để điều khiển toàn bộ, nhưng bạn có thể dùng bất kỳ micro-controller nào bạn đang có.
Thiết lập in (Print Settings):
- In phần Shaft cho CHẮC. Mình dùng PETG @80% infill (PLA+/PLA Meta cũng được). Shaft là phần gánh phần lớn trọng lượng nên đừng tiếc infill.
- Mấy phần còn lại in @ 10–20% infill là được
- Chỉ có J2 là cần in kèm support. Còn lại in không cần support vẫn ổn.
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...










Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!