Mũ súng Robot XRP - Robot của bạn giờ đã có hỏa lực

Biến robot XRP của bạn thành một cỗ máy chiến đấu di động với thiết kế 'Mũ súng' tích hợp súng bắn dây thun. Dự án bao gồm hướng dẫn lắp ráp, mạch điều khiển nguồn phụ và tùy chọn nâng cấp theo dõi nhiệt để tăng tính giải trí cho robot của bạn.















Mô tả
Vật liệu cần chuẩn bị
1 – 1 – Servo 20Kg-cm 1 – Winch Servo SW5513-6MA 4 – Vít lục giác M3-0.5x3mm 14 – Vít lục giác M3-0.5x10mm 1 – Vít lục giác M3-0.5x20mm 8 – Đai ốc M3-0.5 2 – Servo horn tròn 25T 20mm Keo CA (keo 502)
Phụ kiện có thể bổ sung
1 – 2 –
Công cụ hữu ích
Tua vít lục giác đầu bi 2.5mm Dao để làm sạch vật liệu in hỗ trợ Gun_Hat_Servo_Test_Driver (Bảng mạch PCB) Servo_AUX_Power_Controller (Bảng mạch PCB)
Thảo luận
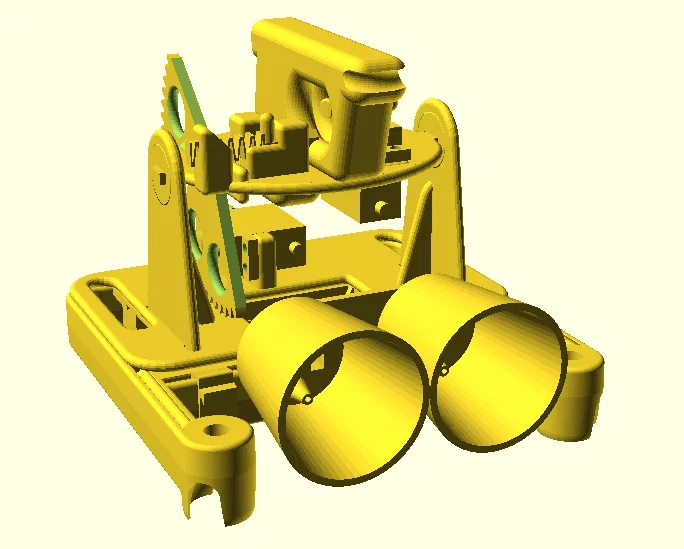
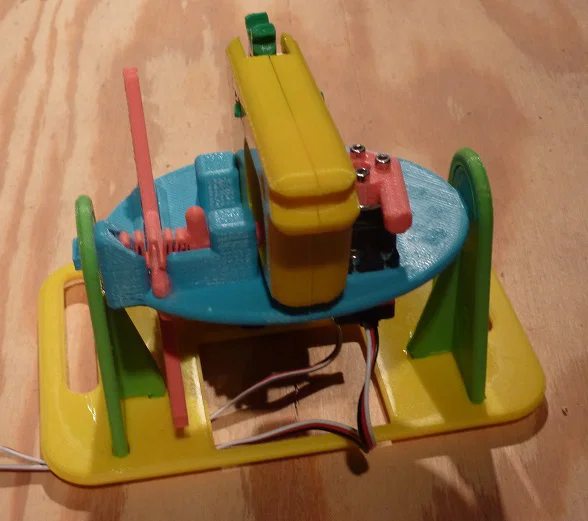
Vấn đề chuỗi cung ứng tại Sparkfun khiến các bộ kit robot XRP bị thiếu hàng vừa là cái may cũng là cái xui. Cái may là bạn có thể tự thiết kế bằng các file 3MF cho khung robot. Cái xui là không thể kiểm tra trực tiếp. Thiết kế này tự hoạt động bằng cách đặt trên đầu robot XRP như một chiếc mũ. Súng dây thun được giữ bởi chốt lò xo để dễ dàng tháo lắp và nạp đạn. Bạn có thể biến mô hình này thành một chiếc AT-AT trong Star Wars, xe tăng WWII, hoặc một nền tảng súng di động. Hãy tải file STL vào phần mềm CAD và thỏa sức sáng tạo.
Vấn đề về Servo
Đối với chuyển động quay, thay vì dùng motor bước, mình chọn "Sail Winch Servo" vì nó cho phép quay nhiều vòng dựa trên xung PWM tiêu chuẩn. Servo này điều khiển góc nâng. Còn với servo bóp cò, mình dùng loại 20kg-cm để đảm bảo đủ lực kéo. Lưu ý rằng các servo này tiêu thụ điện năng liên tục, vì vậy hãy chú ý đến dung lượng pin để tránh tình trạng sụt áp làm Raspberry Pi bị reset.
Bộ điều khiển nguồn phụ (Servo AUX Power Controller)
Để tránh quá tải cho Raspberry Pi, mình đã thiết kế một bảng mạch PCB nguồn phụ. Nó giúp cấp nguồn riêng cho servo và có thể bật/tắt qua phần mềm. Bạn có thể đặt mua bảng mạch này tại OSH Park và xem hướng dẫn lắp ráp đi kèm trong các file thiết kế.
In ấn
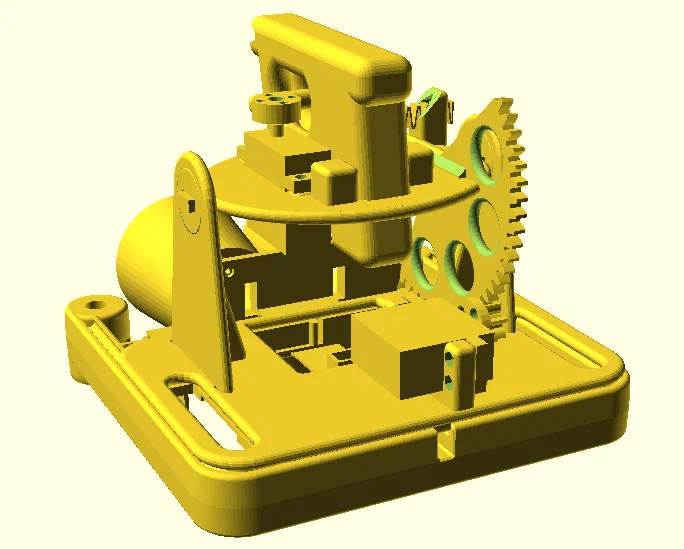
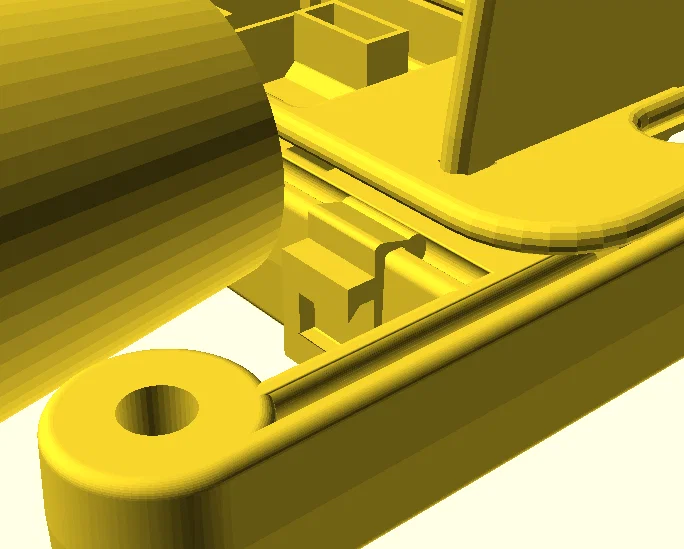
Mình in với lớp 0.25mm, mật độ 15% dạng tổ ong, 2 đường biên (perimeters) và 4 lớp trên/dưới. Đừng quên bật hỗ trợ (support) cho các cạnh tròn và vị trí lắp vít trong bánh răng spur7.
Lắp ráp
Hãy cẩn thận khi lắp đai ốc vào các hốc (nut traps) và dùng keo CA để cố định bánh răng vào bệ đỡ. Sau khi lắp xong, hãy dùng mạch test để kiểm tra góc quay của servo trước khi gắn vào khung cố định. Chúc các bạn thực hiện thành công!
Giấy phép

File mô hình








Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!