Robot 2WD Raspberry Pi (flexbot) – Raspberry Pi Zero + L298N
Bộ file in 3D cho robot 2WD nhỏ gọn dùng Raspberry Pi Zero, motor controller L298N và PCB flexbot để đi dây gọn. Kèm danh sách chi tiết STL, thông số PLA 1.75mm, layer 0.15mm và link hướng dẫn/firmware.



Mô tả
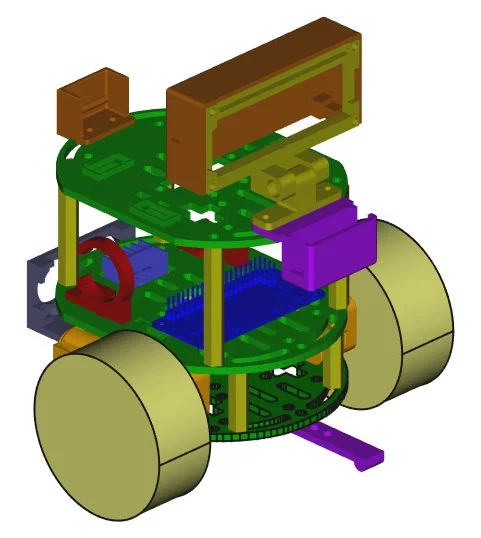
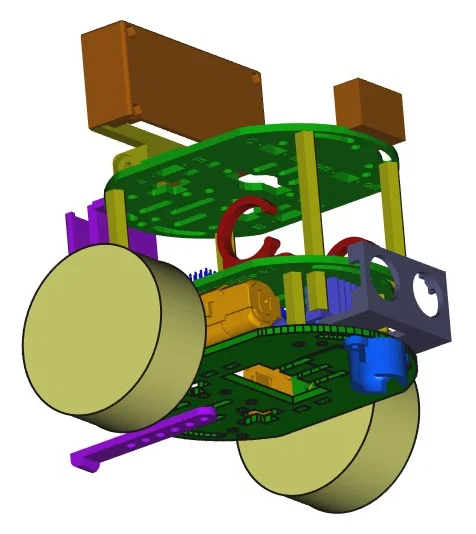
Một bộ chi tiết in để lắp một robot 2WD, được điều khiển và quản lý bởi Raspberry Pi Zero và bộ điều khiển motor L298N. Robot dùng PCB tuỳ biến (flexbot) để đơn giản hoá việc đi dây/kết nối.
Thiết kế robot này (giai đoạn phát triển khá sớm, khoảng năm 2019) được điều khiển bằng bộ 4 công tắc trượt 2 vị trí, cho phép dừng/chạy theo logic cho bất kỳ 8 chế độ hoạt động nào; các chế độ này được “set” bằng 3 trong số các công tắc trượt.
Tất cả chi tiết đều dùng PLA 1.75mm và layer height 0.15mm. Thông số in cho từng chi tiết được tạo trên i3 Mk3 được liệt kê trong bảng bên dưới.
Xem thêm chi tiết về cách lắp và sử dụng robot tại link này. Một số phần mềm mẫu để vận hành robot, cùng với file thiết kế gerber cho PCB tuỳ biến có thể tải tại GitHub repository này.
component file name/description
needs support (Y/N)
brim (mm)
filament
length (m)
print time
(i3 Mk3)
_chassis_bottom_plate_02_L298N_v1_repairedrotx180.stl: “plate” dưới (đáy) trong thiết kế 3 tấm
N
5
5.91
1h 59m
_chassis_middle_plate_v1_L298N_04repaired.stl: “plate” giữa trong thiết kế 3 tấm
N
5
6.33
2h 19m
_top_battery_plate_4SS_variant04_repairedrotx180.stl: “plate” trên (tấm pin) trong thiết kế 3 tấm
N
5
6.39
2h 18m
_2x_chassis_spacer_3mmrepaired.stl: cặp spacer có khía giữa tấm dưới và tấm giữa, nơi motor giảm tốc được bắt vít vào
N
none
0.76
16m
_50mm_hex_spacer01_x4packed.stl: 4 spacer lục giác dài 50mm
N
8
2.88
1h 40m
_25mm_hex_spacer01_x4packed.stl: 4 spacer lục giác dài 25mm
N
8
1.54
52m
_15mm_hex_spacer01_x4packed.stl: 4 spacer lục giác dài 15mm
N
8
1.06
35m
_anti-tipbar01.stl: thanh gắn dưới mặt tấm đáy để tránh robot bị “chổng”/lật khi tăng tốc mạnh
N
none
0.66
17m
_HC-SR04holder04.stl: giá đỡ cho cảm biến siêu âm phát hiện vật cản
N
none
1.93
1h 5m
Caster.stl: giá giữ một viên bi thuỷ tinh làm “caster wheel” cho phần trước của robot
N
none
2.88
35m
_21mm_left+right_battery_holder03roty180.stl: cặp ngàm trái/phải để pin sạc dạng battery bank 5V đường kính 21mm trượt vào
N
5
1.47
39m
_wider_dongle_holder05rotx180.stl: giá đỡ cho đầu nối female Type A ở cuối sợi cáp nối vào cổng USB của Pi
Y
5
2.2
59m
_robotbase01.stl: chi tiết liên kết robot cho giá đỡ màn hình LED
N
none
0.69
25m
ScreenMount12.stl: ngàm gắn màn hình LED chính, xoay/pivot trên chi tiết liên kết robot ở trên
N
3mm
2.3
1h 3m
_screen_rearcover11.stl: nắp che mặt sau của màn hình LED
N
3mm
4.71
1h 43m
_robot_cameraclip02.stl: ngàm giữ camera USB tuỳ chọn
N
3mm
1.06
36m
_LLS_spacer03rot180.stl: small spacer nhỏ để “stand off” module chuyển đổi LLS khỏi PCB
N
none
0.13
6m
_line_sensor_holder09rotx180.stl: giá đỡ cho 3 cảm biến dò line (trái/giữa/phải)
N
none
1.51
42m
Giấy phép

File mô hình


















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!