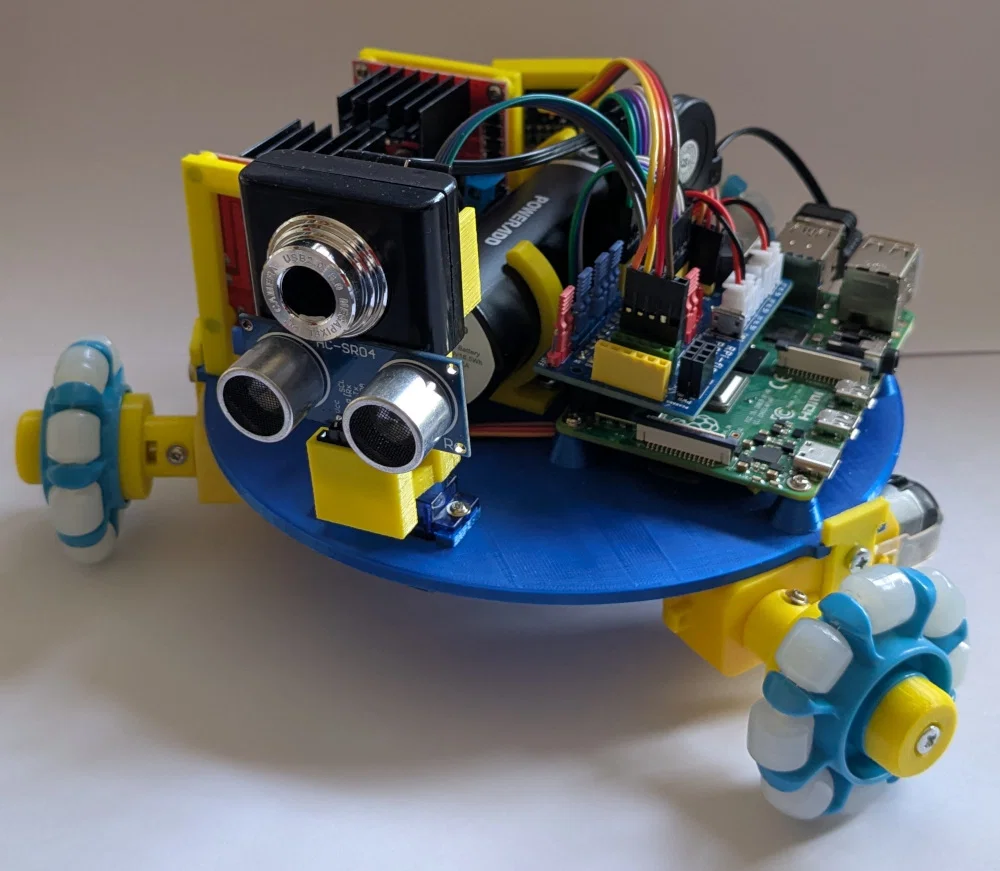
Robot 3WD RPi-flex PCB (Raspberry Pi 4)
Bộ chi tiết in 3D cho robot 3WD dùng Raspberry Pi 4 (SBC), chassis một tấm và PCB tùy chỉnh để đơn giản hoá kết nối. Có sẵn các file STL cho chassis, gá motor, mount cảm biến/camera, OLED và adaptor omni-wheel.



Mô tả
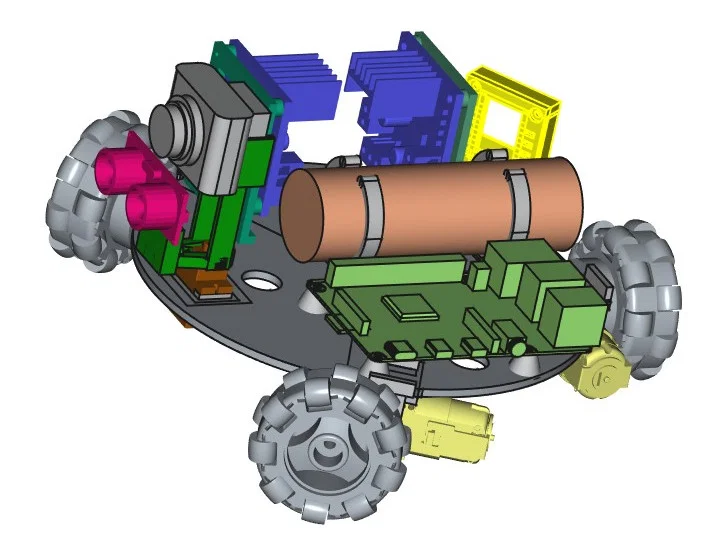
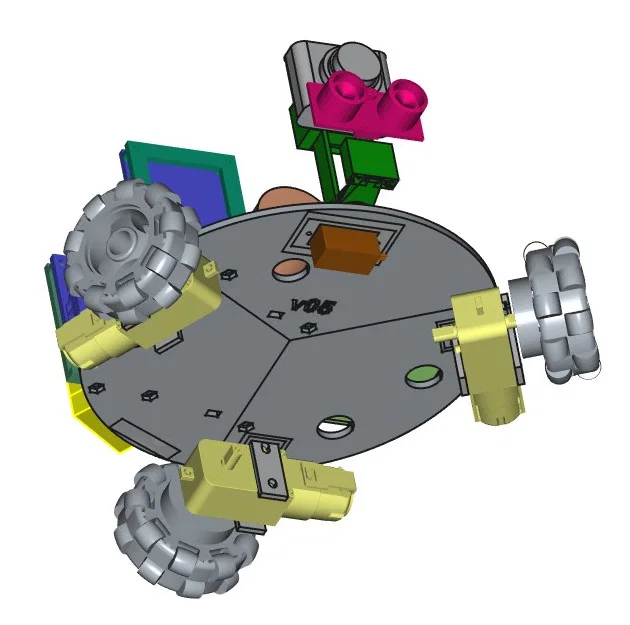
Một bộ chi tiết in 3D để lắp một robot 3WD có thể điều khiển và quản lý bằng máy tính bo mạch đơn Raspberry Pi4 (SBC) — trong đó dùng omni-wheels với adaptor tùy chỉnh cho cả ba motor giảm tốc truyền động.
Mô tả chi tiết đầy đủ về mọi phần của dự án (đang tiếp tục phát triển) nằm ở link này, kèm thêm thông tin về các tuỳ chọn chi tiết in 3D bổ sung tại link này. Các chi tiết bổ sung được dùng đều là một phần của hướng tiếp cận “flexible chassis” tổng quát hơn; bộ chi tiết đầy đủ của hướng này có tại link Prusa này, nhưng được lặp lại ở đây để đầy đủ thông tin.
Phần chassis chính (một tấm duy nhất) in 3D được thiết kế để có thể lắp một bộ tiêu chuẩn các cụm truyền động, cảm biến và các linh kiện khác. Chassis in 3D và toàn bộ chi tiết đều dùng PLA 1.75mm và layer height 0.15mm.
Chi tiết in cho tấm chassis và từng component được in trên i3 Mk3 được thể hiện trong bảng bên dưới.
tên file component/mô tả
cần support (Y/N)
brim (mm)
filament
chiều dài (m)
thời gian in
(i3 Mk3)
_3WD_chassisplate05stl: tấm chassis chính
N
5
14.05
3h 51m
_6x_motor_fixingtab02.stl: các tab gài vào tấm chassis để cố định các motor truyền động
N
3
1.99
49m
_slide_switchx4spacer01.stl: spacer cho công tắc trượt
N
0
0.11
4m
_2x_L298N_vcradleExHi_s-lugs02roty90.stl: ngàm/mount bắt dọc cho motor controller L298N
N
0
2.41
1h 3m
_2x_32mm_top_open_batholder02.stl: hai kẹp gắn cho battery bank 32mm 5000mAh 5V/2A
Y
0
2.20
50m
_HC-SR04+camera_servoarm09-repaired.stl: giá gắn cảm biến siêu âm và camera USB (gắn trên servo)
Y
3
2.83
1h 48m
_OLED1flat08-front+back.stl: bộ gá OLED 128x64 dạng 2 mảnh cho OLED rộng 27.3 mm và cao 27.8mm
N
0
2.50
1h 10m
_OLED2flat05-front+back.stl: bộ gá OLED 128x64 dạng 2 mảnh cho OLED rộng 24.7mm và cao 27.0mm
N
0
2.62
1h 12m
_omni_wheeladaptor01-connector.stl: adaptor trong (phần chính) cho một omni-wheel
Y
0
1.70
52m
_omni_wheel_adaptor02-3x_hubcap.stl: ba nắp hub ngoài dùng để cố định adaptor trong vào omni-wheel
N
0
1.28
29m
Giấy phép

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!