Chân đế giảm rung cho Elegoo Neptune 4/Pro

Mẫu chân đế giảm rung lấy cảm hứng từ Bambu Lab, giúp cải thiện gia tốc bàn in đáng kể. Thiết kế vừa vặn với ốc vít gốc của Neptune 4/Pro. Hướng dẫn in chi tiết với nhựa TPU để đạt hiệu quả tối ưu cho máy in của bạn.




Mô tả
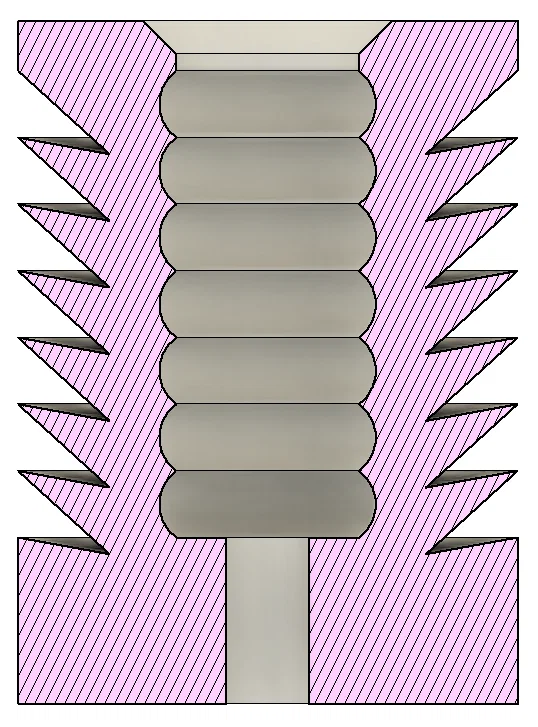
Đây là mẫu chân đế giảm rung được lấy cảm hứng từ thiết kế của Bambu Lab. Chân đế có đường kính 30mm và chiều cao 41mm. Bạn cần tháo các chân đế gốc ra và thay bằng loại này. Thiết kế này được làm để vừa khít với các ốc vít nguyên bản của máy.
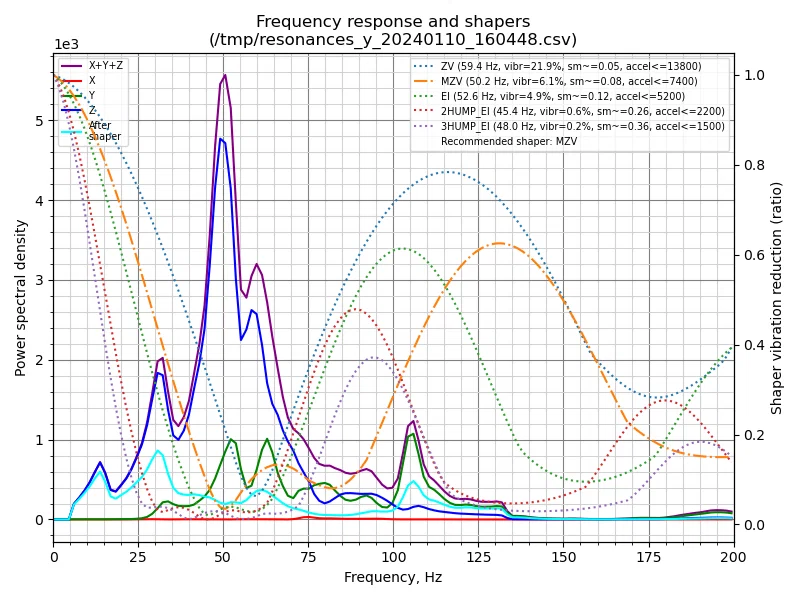
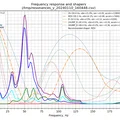
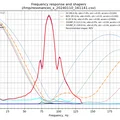
Sau khi lắp chân đế này, thông số 'SHAPER_CALIBRATE Y' khuyến nghị cho bàn in của mình đã thay đổi từ 2hump_ei với gia tốc tối đa là 2.900mm/s^2 sang mzv với gia tốc tối đa lên đến 7.400mm/s^2.
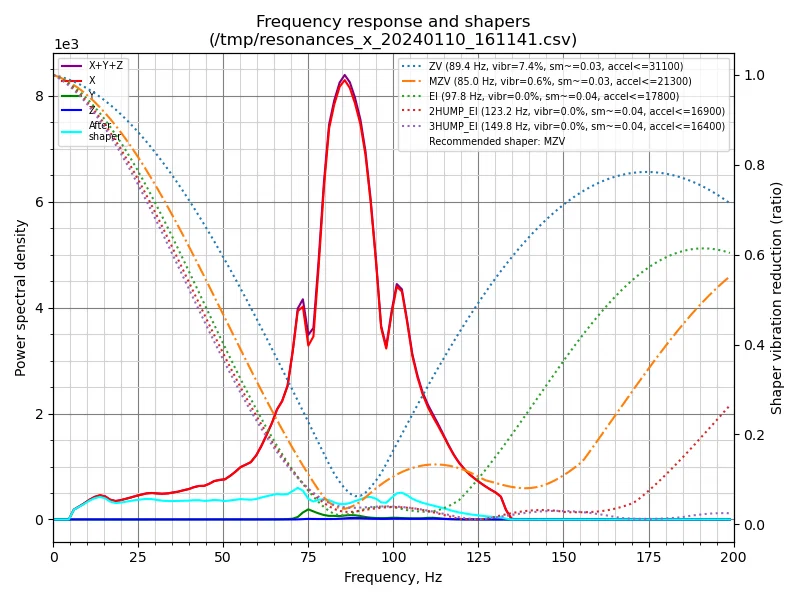
Mình đang sử dụng thiết bị FYSETC-PortableInputShaper để cân chỉnh input shaping. https://github.com/FYSETC/FYSETC-PortableInputShaper
Thiết lập in:
- TPU
- Chiều cao lớp in (layer height): 0.2mm
- Hai vách (two walls)
- Bật tính năng alternating extra walls
- Infill Gyroid 10%
Các phép đo này đã bao gồm chân đế TPU và phần ốp quạt V5 của mình được in bằng nhựa Overture lightweight PLA. Mặc dù mình không có các số đo trước đó để đối chiếu, bạn có thể tự đo đạc máy in của mình trước khi in chân đế này.

Nếu bạn thấy những thiết kế của mình hữu ích, đừng ngại mời mình một ly cà phê nhé!
https://www.paypal.me/OrzOrzOrzPP https://www.buymeacoffee.com/orzorzorz

Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!