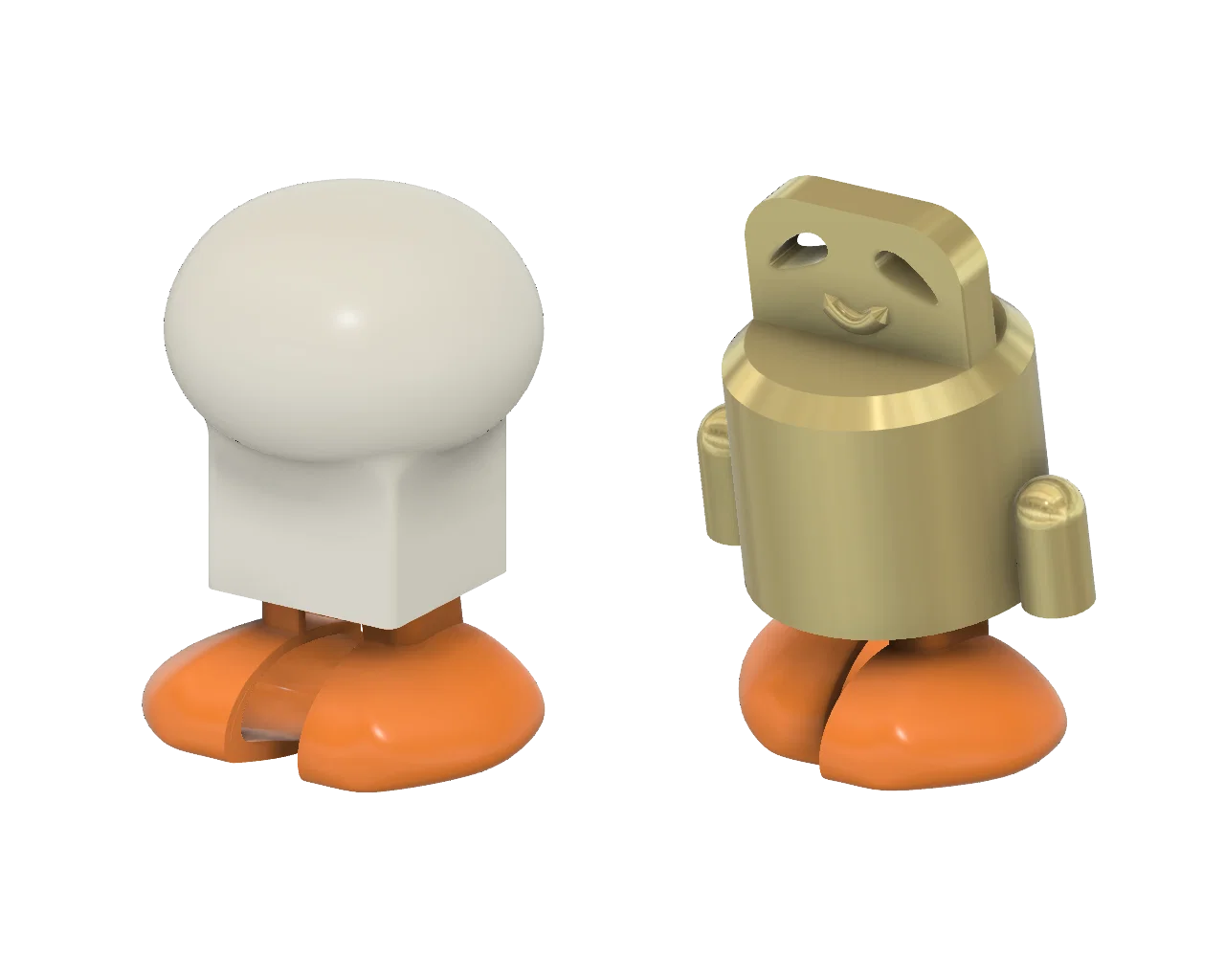
Mô hình búp bê đi bộ tự động - Teku-Teku kun

Khám phá chú búp bê Teku-Teku kun cực dễ thương, có thể tự bước đi trên mặt phẳng nghiêng mà không cần dùng động cơ hay pin. Tất cả linh kiện đều in 3D không cần support, cực kỳ thú vị để giải trí và học tập!








Mô tả
Trước hết, mọi người hãy xem video demo nhé!
※Phần tiếng Nhật được để ở phía dưới.
Tất cả các linh kiện đều có thể in được mà không cần support.
-
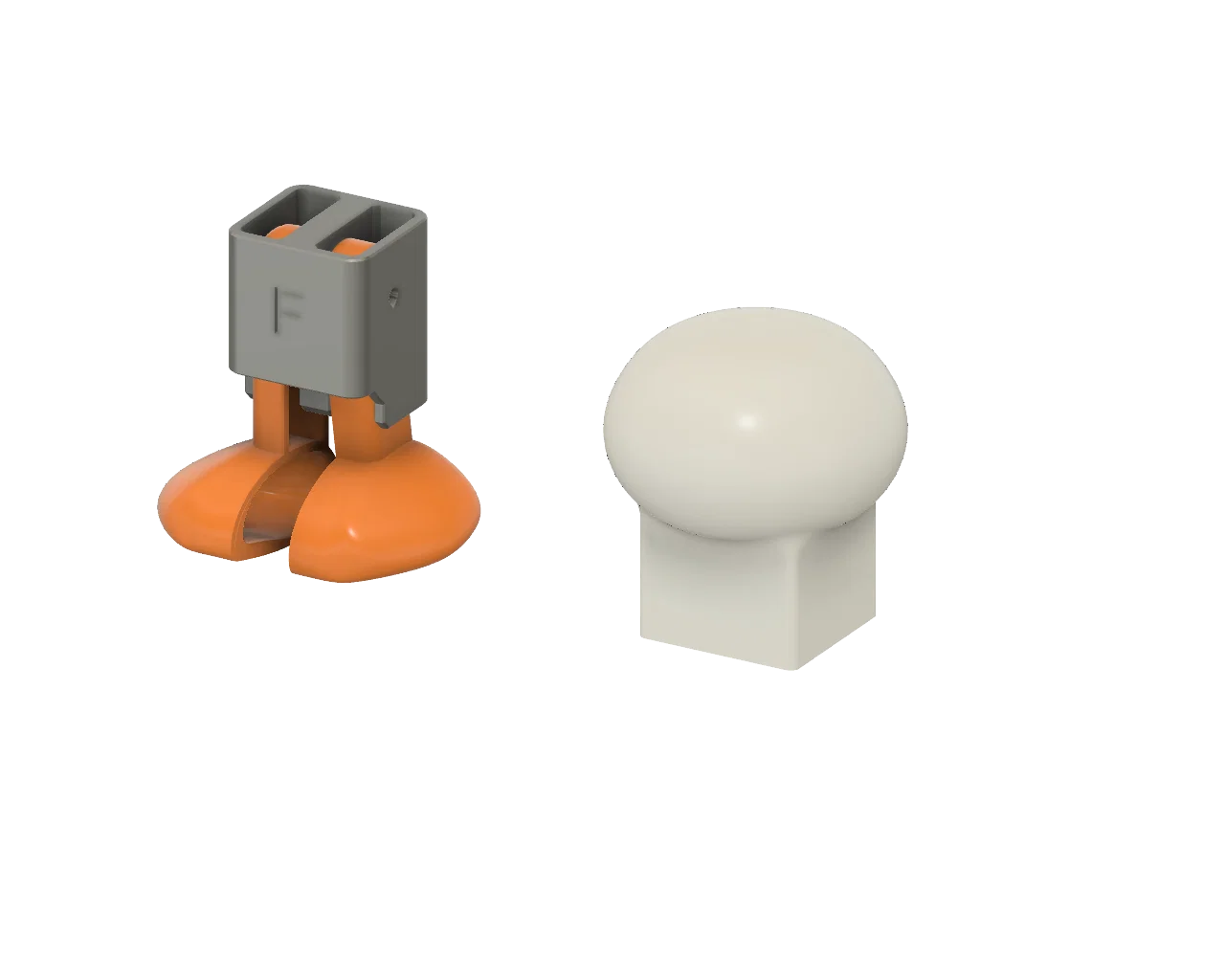
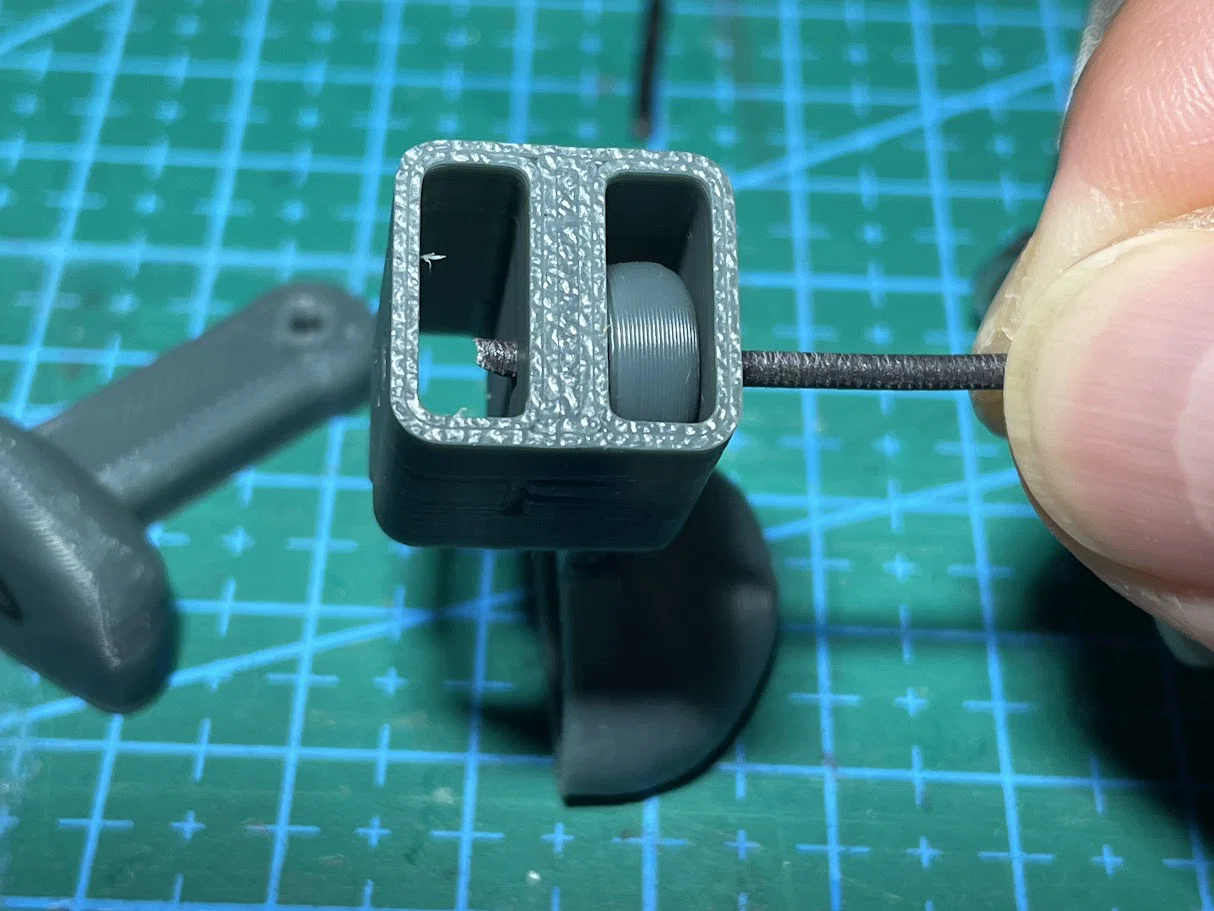
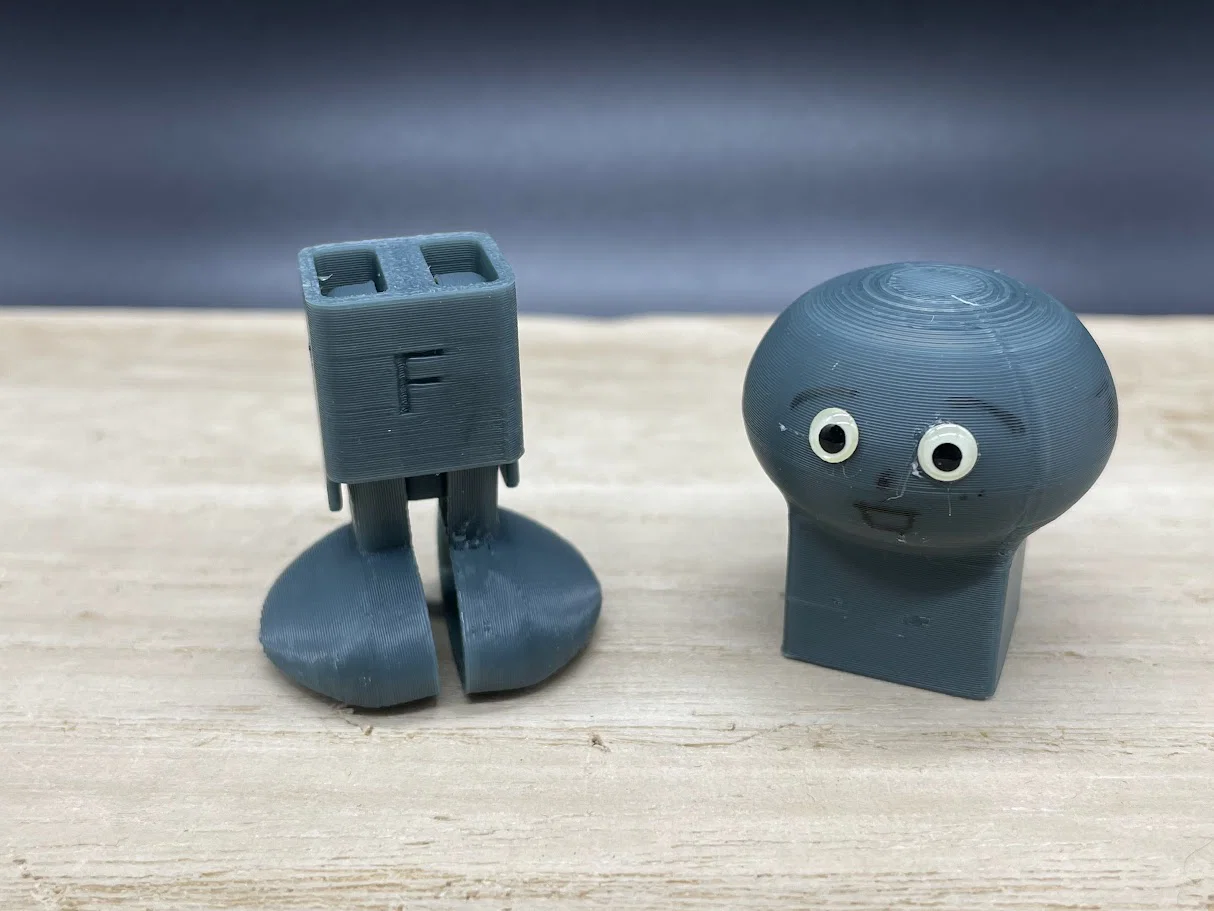
Lắp ráp ba linh kiện (WakingBody.stl, RightLeg.stl, LeftLeg.stl) bằng một đoạn sợi nhựa filament dư. Mặt có dập chữ "F" trên thân là mặt trước, mọi người chú ý đừng lắp ngược nhé!
-
Hãy đảm bảo chân có thể đung đưa tự do. Nếu lỗ bị nhỏ do hiệu ứng elephant foot, hãy nong rộng lỗ ra để chân chuyển động trơn tru mà không bị cản trở.
-
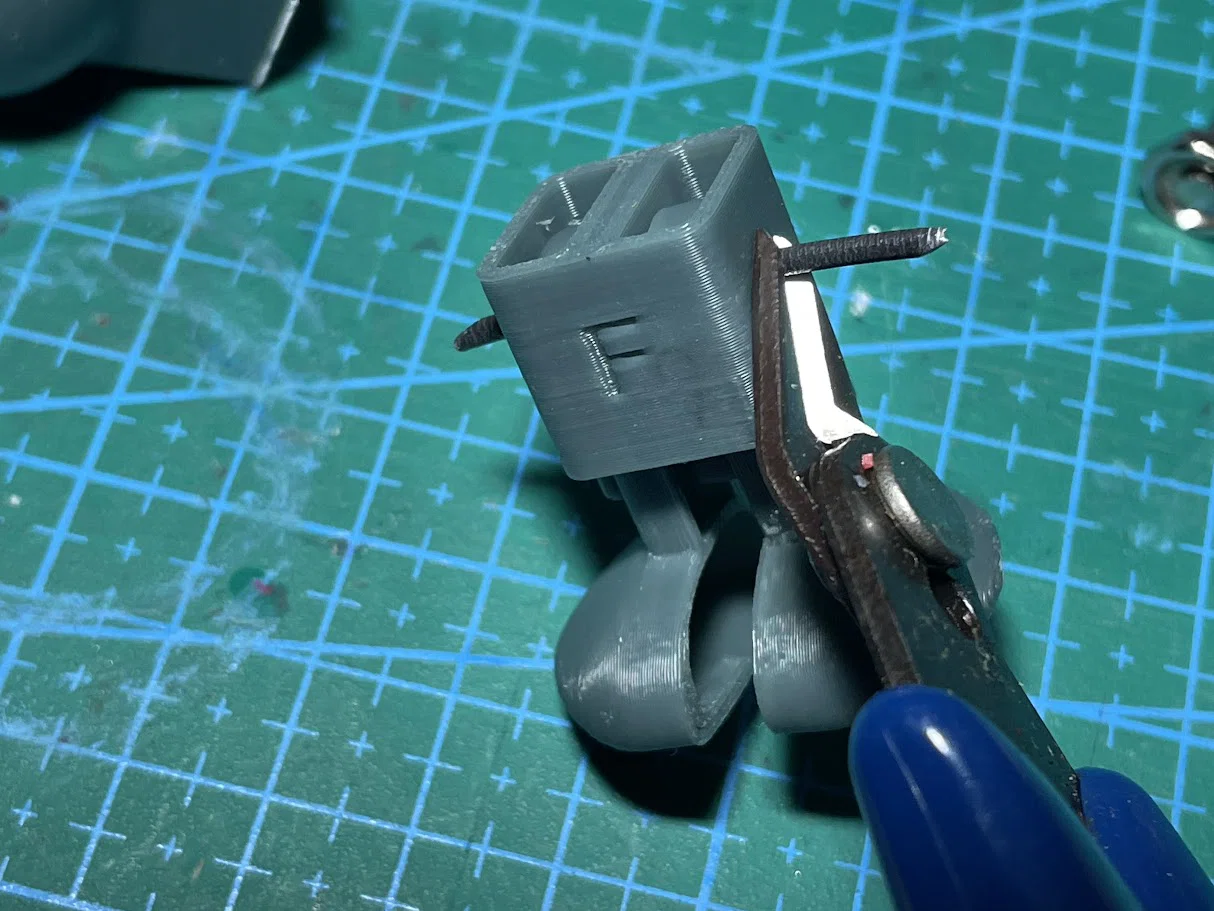
Cắt bỏ phần sợi nhựa thừa nhô ra ở hai bên.
-
Phần thân bên trên có thể được thiết kế để tùy biến theo ý thích, miễn là khớp với kích thước WalkingBody.stl (15mm x 16mm x 20mm), trọng tâm không nên quá cao và đừng làm quá nặng để đảm bảo robot có thể bước đi.
*Xin lỗi vì mẫu này nhìn không được đẹp lắm, mình không khéo tay cho lắm.
Nếu chú robot không chịu đi, hãy kiểm tra các điểm sau:
(1) Đảm bảo chân di chuyển trơn tru, không có lực cản. Nếu chân không đung đưa tự do, hãy nong rộng lỗ ra thêm nhé!
(2) Cẩn thận tránh lắp nhầm chân trước và chân sau.
Chân có dập chữ "F" phải nằm ở phía trước, hãy chắc chắn là không lắp ngược chân!
(3) Khi đặt xuống sàn mà nó không chịu đi, hãy khẽ nghiêng nó sang trái hoặc phải một chút. Nếu đẩy từ phía sau, nó sẽ ngã đấy!
Hãy thử in và tạo ra chú búp bê TEKU-TEKU của riêng mình nhé!
Giấy phép

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!