Khung Quadcopter/Drone in hoàn toàn cho cánh 9 inch

Khung quadcopter/drone in 3D hoàn toàn cho cánh 9 inch, nhiều không gian bên trong và nhiều điểm gắn linh kiện. Thiết kế modular, tay thay dễ, in không cần support—hợp bay FPV casual hoặc làm nền tảng test.














Mô tả
Đây là một khung quadcopter in 3D hoàn toàn, bay được kiểu acro và có sẵn nhiều điểm bắt để gắn đủ loại linh kiện. Mình thiết kế nó như một nền tảng để test và làm theo hướng modular tối đa. Phần tay (arms) đã qua nhiều lần chỉnh sửa để tìm ra thiết kế vừa nhẹ vừa cứng. Mình dùng với INAV và flight controller Omnibus F4, nhưng hầu như flight controller và phần mềm hiện đại nào cũng dùng được.
Tính năng:
- Gắn pin phía dưới hoặc phía trên bằng dây đai (battery strap)
- Nhiều điểm bắt để gắn thêm phần cứng ở cả bên trong và bên ngoài
- Tay (arms) thay thế dễ dàng
- Bản hiện tại chịu được các thao tác 3g+ không vấn đề
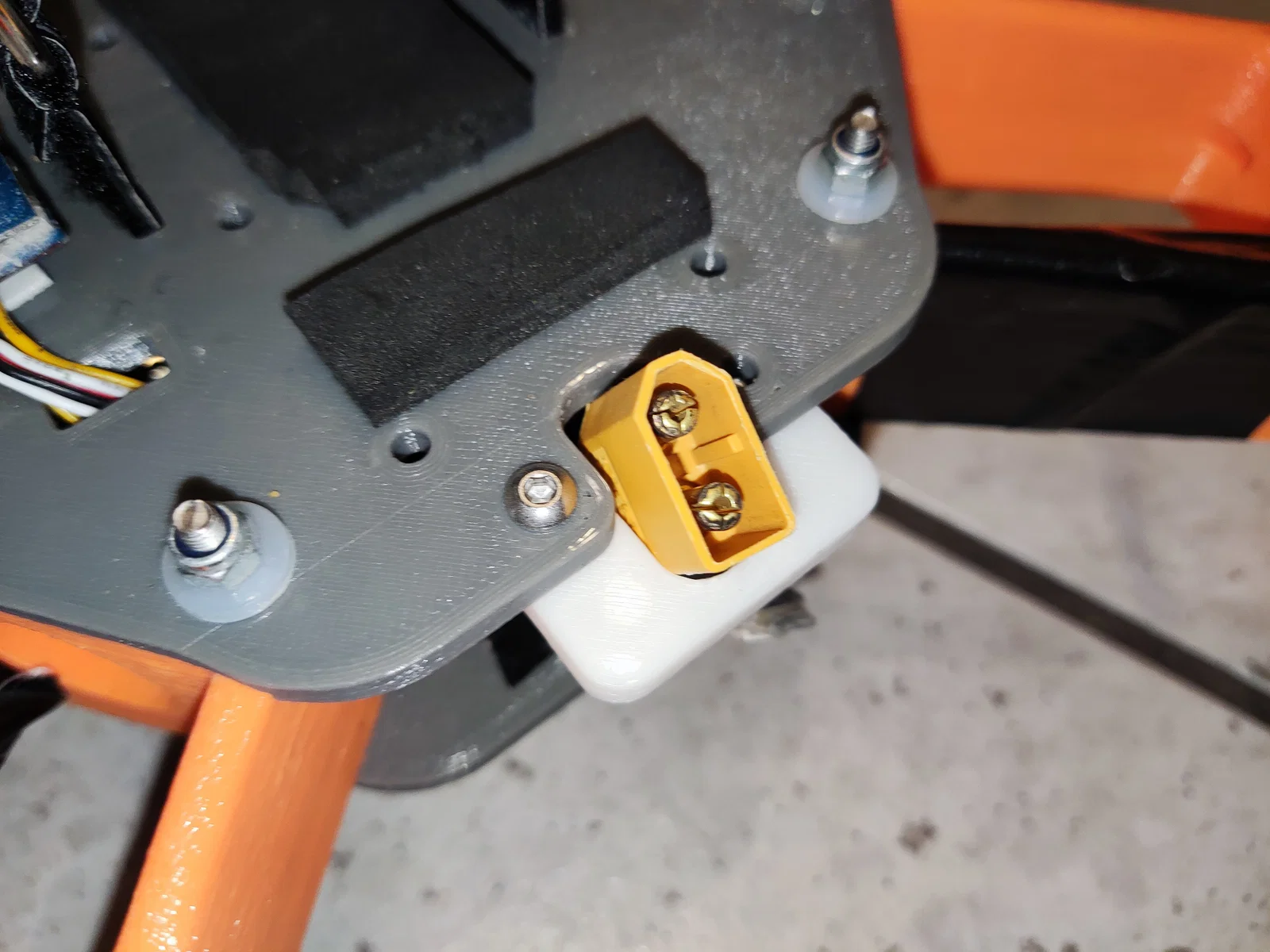
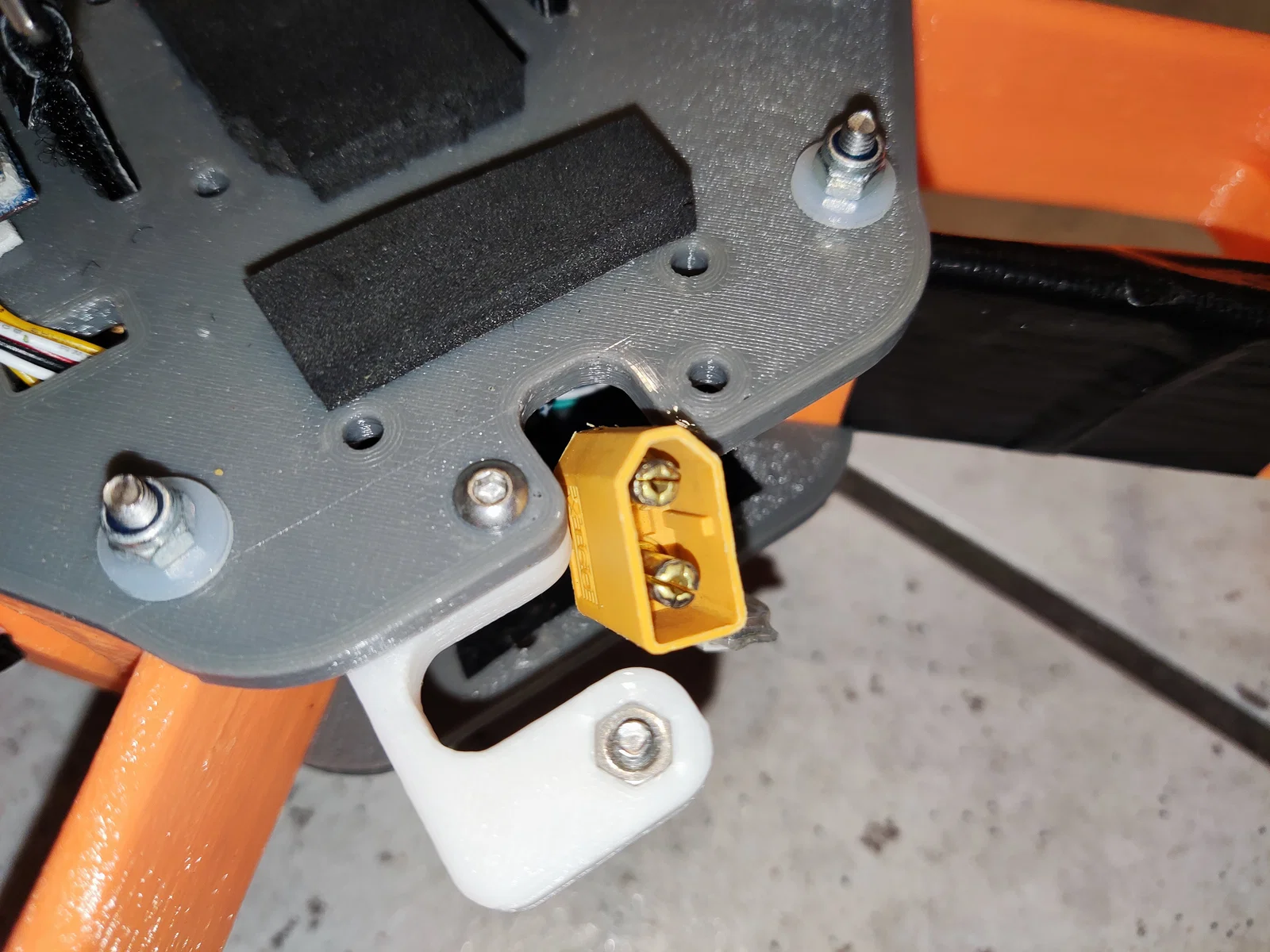
- Có kẹp giữ dây pin (nếu gắn pin trên)
- Thiết kế Wide X để đẩy tay ra khỏi khung hình của camera fpv/hd
- Thời gian hover lâu nhờ trọng lượng tương đối nhẹ với cánh quạt lớn
- Có sẵn ngàm (mount) cho Runcam Thumb Pro
- Tùy chọn chân đáp
- Dễ in, không cần support
- Cả 4 tay đều giống nhau
Thông số:
- Cánh quạt: tối đa 9 inch (mình dùng 9x4.5)
- Ngàm stack: 30.5mm x 30.5mm
- Kích thước motor: pattern lỗ 16mm x 19mm, đường kính tối đa khoảng ~30mm (đường kính lỗ là 33mm)
- Pin: mình dùng tối thiểu 1300mah 5s, nhưng có thể tới 5000mah 4s
- ESC: tối thiểu 30A 4s (khuyên dùng loại 4in1)
- Trọng lượng: 660g (không gồm pin)
Phần cứng (Hardware):
- ESC, motor, prop, camera FPV cỡ micro, VTX, receiver, dây đai pin và các món tiêu chuẩn khác của quad
- Khuyên dùng motor có connector để việc lắp tay dễ hơn nhiều.
- Nếu bạn cần phiên bản có lỗ bắt cho linh kiện khác, cứ nhắn mình.
- Motor đường kính ngoài tới 30mm và pattern lỗ tiêu chuẩn sẽ vừa với phần gá hiện tại
- Bu-lông M3 và ê-cu khóa (lock nuts)
- 8x bu-lông M3 dài 40mm để giữ tay (mình dùng 45mm nên nó lòi ra chút)
- 16x ốc M3 bắt motor (ốc đi kèm motor thường là dùng được) loại dài hơn chút để gắn chân đáp
- 4x ốc M3 cho flight stack (xài loại nào vừa stack của bạn là được)
- 1x ốc M3 dài 6mm cho kẹp dây pin
- Insert ren (threaded inserts) chỉ cần cho một số lỗ bắt tùy chọn
Lắp ráp:
Bắt motor vào mỗi tay trước và luồn dây qua lỗ về phần giữa. Sau đó lắp electronics stack lên tấm đế trung tâm và gắn camera. Đồng thời gắn dây đai pin ở trên hoặc dưới.
Gắn kẹp pin lên tấm top plate nếu bạn muốn gắn pin phía trên. Tham khảo hình để lắp cho đúng.
Cuối cùng dùng bu-lông M3x40 để siết phần trên và dưới lại với nhau (lưu ý đừng siết quá lực kẻo bể đồ in 3D).
Cài đặt in (Print settings):
Mình khuyên in tay và tấm top/bottom bằng PLA vì độ cứng cao. Mình có in thử PETG nhưng rung nhiều hơn đáng kể. In nhiệt cao để lớp bám tốt. Tất cả chi tiết đều được thiết kế để dễ in.
Tay và các tấm nên in với 20% infill và 3 walls.
Dùng brim cho chân đáp vì diện tích tiếp xúc với bàn in khá nhỏ.
Không cần support!
Chân đáp và kẹp dây pin nên in bằng ABS hoặc PETG để có độ dẻo nhẹ.
Nếu bạn dự kiến crash nhiều hoặc mới chơi, mình khuyên nên dùng khung carbon fiber thay vì loại này, hoặc chuẩn bị sẵn nhiều tay dự phòng.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình












Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!