Mô hình cánh tay robot đa trục (Robot Arm) DIY chính xác cao

Khám phá dự án in 3D cánh tay robot đầy thú vị với sự kết hợp hoàn hảo giữa 4 động cơ servo FEETECH 25KG và động cơ bước NEMA 17. Mô hình này được thiết kế với cấu trúc cơ khí tinh xảo, sử dụng vòng bi từ máy Ender 3 và ốc vít M3 tiêu chuẩn để đảm bảo sự vận hành bền bỉ và chính xác. Đây là giải pháp lý tưởng cho những ai yêu thích tự động hóa, robot và muốn tìm hiểu sâu về nguyên lý truyền động. Với hướng dẫn lắp ráp rõ ràng và các mẹo in 3D chi tiết, bạn sẽ nhanh chóng sở hữu một cánh tay robot tùy chỉnh độc đáo, phù hợp cho nhiều mục đích học tập và giải trí kỹ thuật tại gia.


Mô tả
Mô hình cánh tay robot linh hoạt (Robot Arm Servo + Stepper)
Nếu bạn là một người đam mê kỹ thuật và đang tìm kiếm một dự án để thử thách khả năng in 3D cũng như lập trình điều khiển chuyển động, mô hình cánh tay robot này chắc chắn sẽ làm bạn hài lòng. Đây là một thiết kế cơ khí được tối ưu hóa để vận hành mượt mà, kết hợp giữa sức mạnh của động cơ servo và sự chính xác của động cơ bước, tạo nên một hệ thống cánh tay robot đa trục đầy tiềm năng cho các ứng dụng tự động hóa quy mô nhỏ.
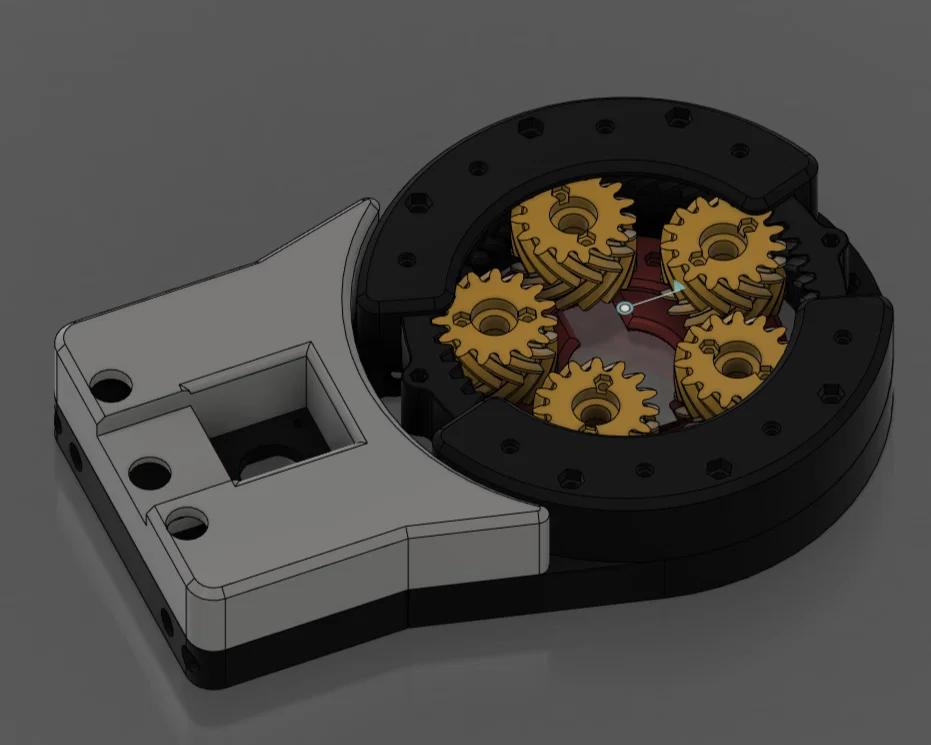
Thiết kế này không chỉ tập trung vào vẻ ngoài hiện đại mà còn chú trọng vào tính ứng dụng cao, cho phép bạn tùy chỉnh để thực hiện các tác vụ như gắp thả vật nhẹ hoặc làm bộ mô phỏng cánh tay công nghiệp. Với cấu trúc sử dụng các khớp nối linh hoạt cùng hệ thống bánh răng phức tạp bên trong, mô hình giúp người chơi hiểu rõ hơn về cơ chế truyền động của robot thực tế. Đây thực sự là một dự án DIY thú vị, giúp nâng cao kỹ năng lắp ráp phần cứng và kiến thức về điều khiển thiết bị điện tử.
Những lưu ý quan trọng khi bắt đầu dự án này:
- Cấu hình động cơ: Dự án yêu cầu 4x Servo FEETECH 25KG để đảm bảo mô-men xoắn đủ mạnh cho các khớp và 1x động cơ bước NEMA 17 để điều khiển phần trục xoay chính xác.
- Phụ kiện đi kèm: Bạn cần chuẩn bị sẵn các loại vòng bi (bearing) từ máy in Ender 3 và bộ ốc vít M3 để cố định các khớp nối chắc chắn.
- Lựa chọn vật liệu: Nên ưu tiên sử dụng nhựa PLA hoặc PETG với độ cứng cao để đảm bảo các bộ phận không bị biến dạng dưới áp lực trọng tải.
- Thiết lập in 3D: Để có các chi tiết khớp nối chuẩn xác, bạn nên chọn độ cao lớp in (layer height) từ 0.16mm đến 0.2mm và hỗ trợ (support) đầy đủ cho các chi tiết bánh răng phức tạp.
- Lưu ý lắp ráp: Hãy kiểm tra độ khớp của các bánh răng trước khi lắp cố định toàn bộ hệ thống để tránh tình trạng kẹt khi động cơ vận hành.
Việc chế tạo một cánh tay robot tại nhà là một trải nghiệm học hỏi tuyệt vời. Bằng cách kết hợp các linh kiện điện tử phổ biến với những chi tiết được in 3D sắc nét, bạn sẽ có ngay một mô hình robot chuyên nghiệp ngay trên bàn làm việc của mình.
Giấy phép

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!