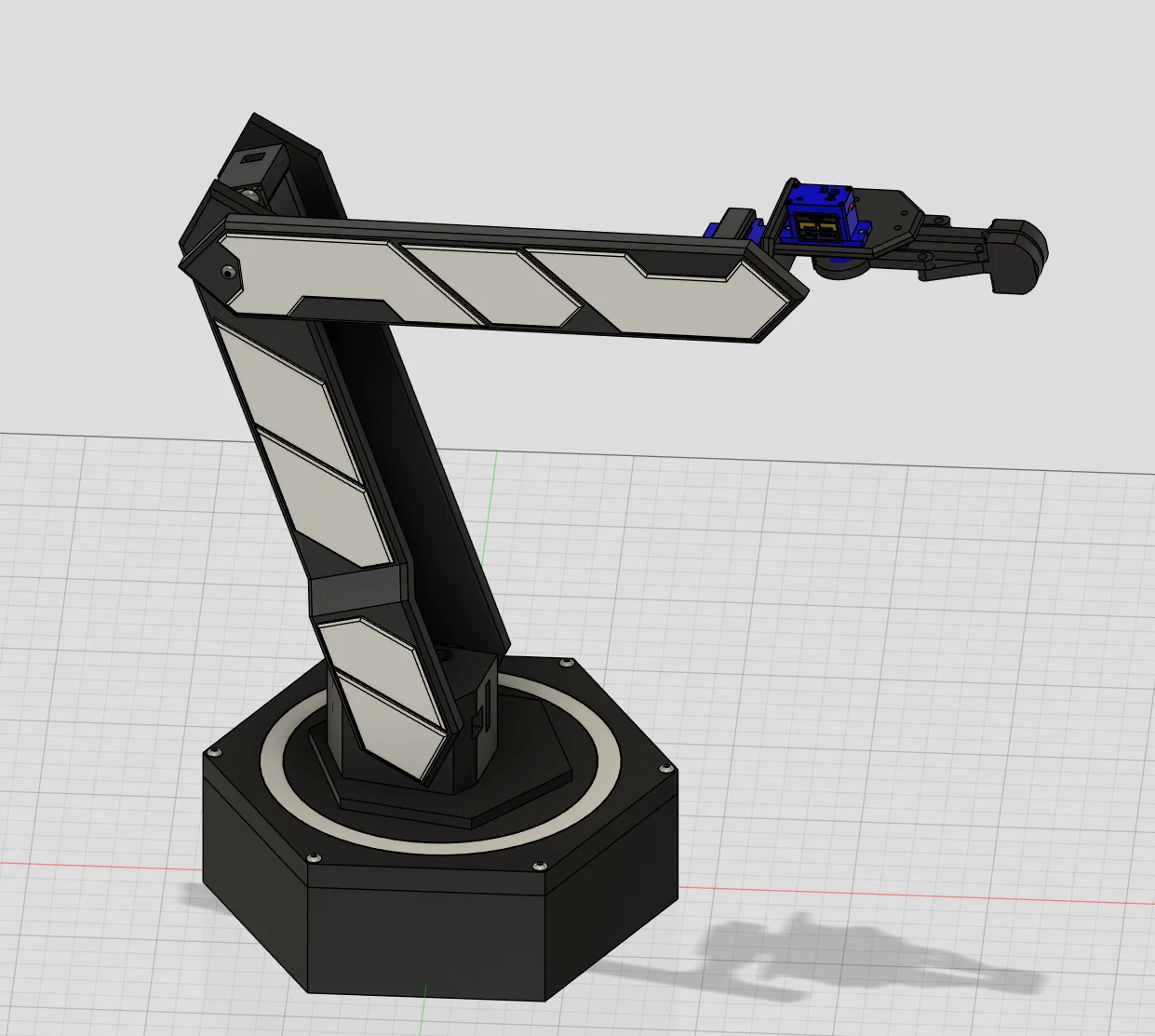
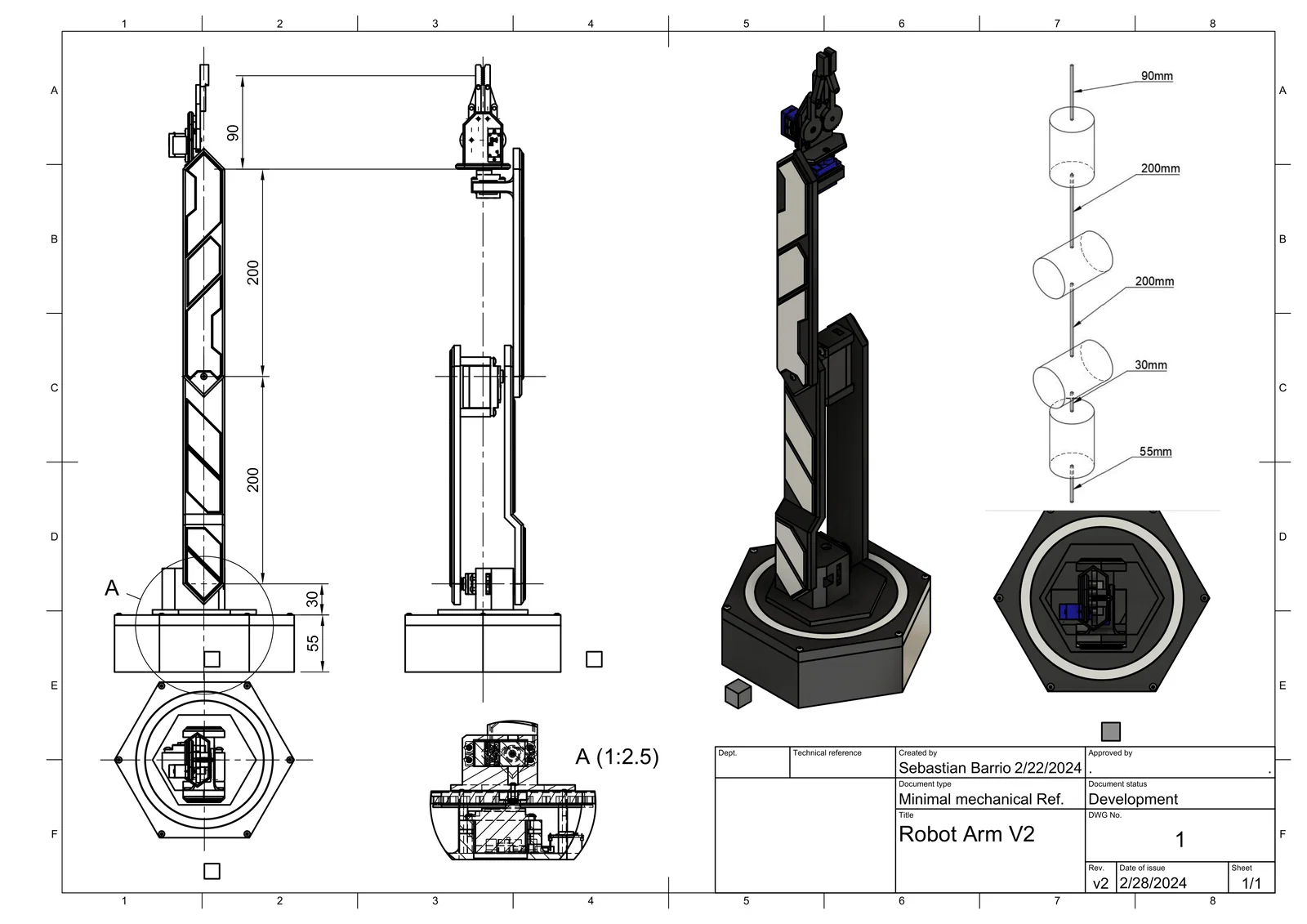
Cánh tay Robot servo 4DOF (servo Robot Arm 4DOF)

Mẫu servo Robot Arm 4DOF in 3D có gripper cơ bản và vòng NeoPixel, dùng ESP32 điều khiển servo. Có kèm link code và inverse kinematics; lắp ráp bằng ốc M3/M4 và cần 2 vòng bi 12x8x7mm.




Mô tả
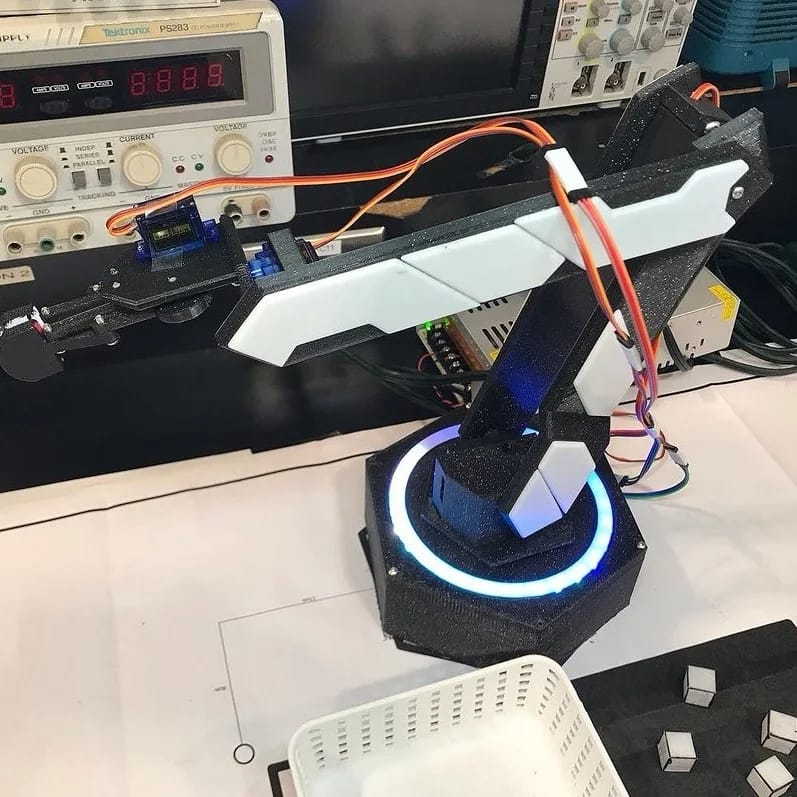
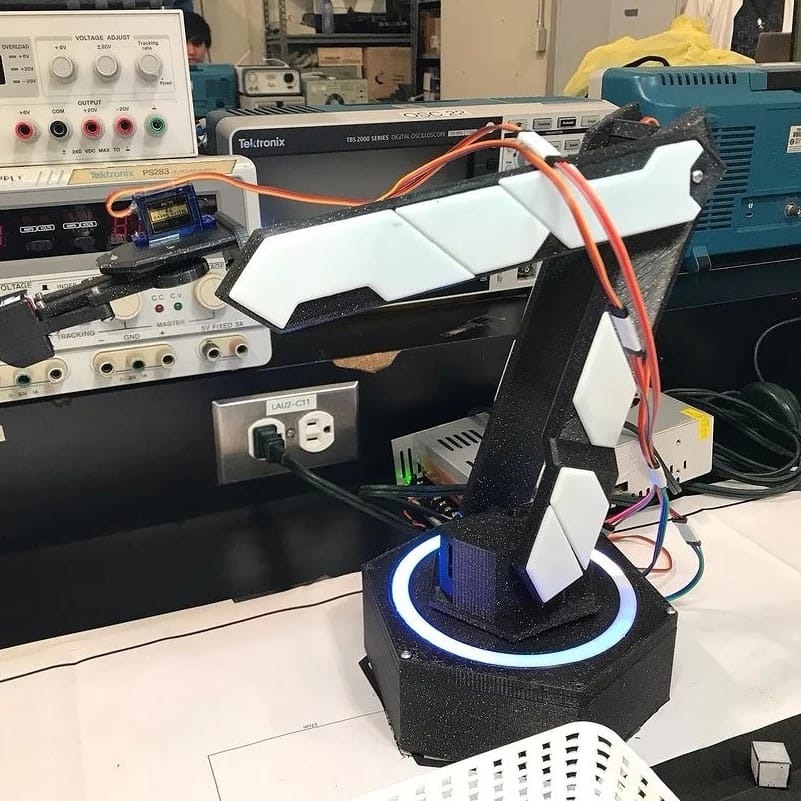
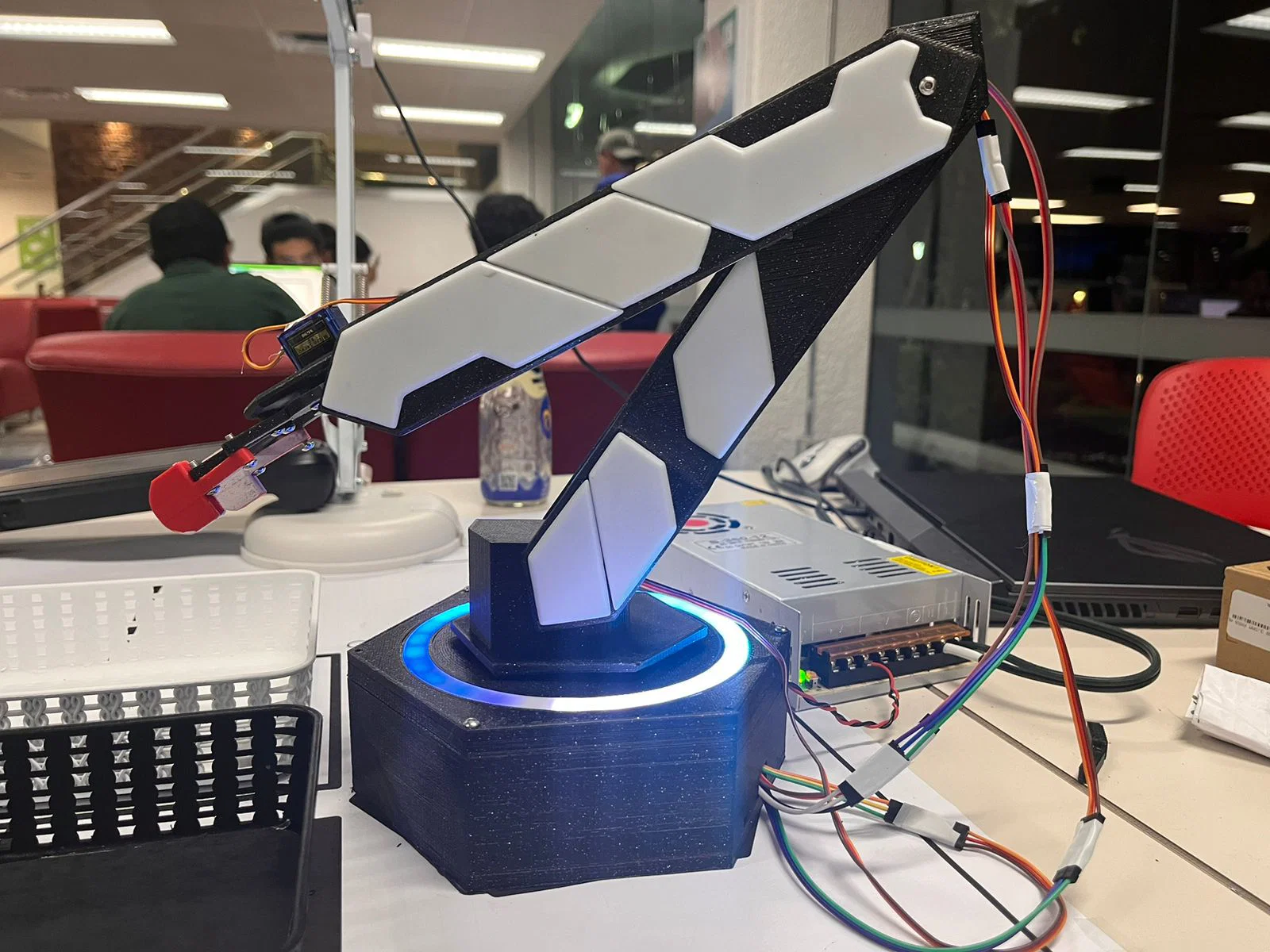
Đây là cánh tay robot mình làm cho đồ án ở trường, thiết kế để gắp và đặt các khối lập phương bằng computer vision. Toàn bộ code dự án và phần inverse kinematics có thể xem tại https://github.com/papalino456/RobotArm,
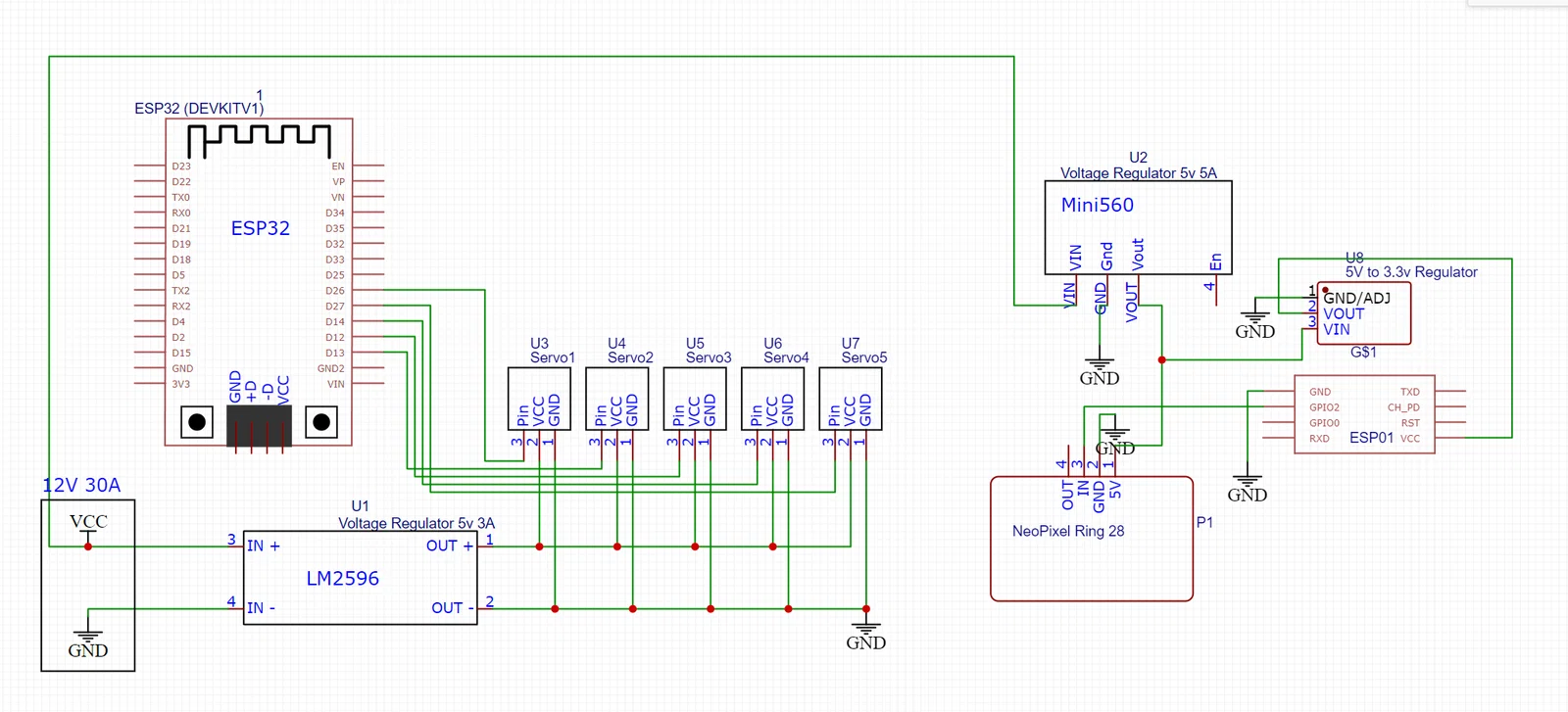
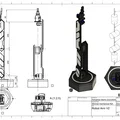
Model dùng ESP32 làm hệ điều khiển chính và một ESP-01 riêng để điều khiển LED bằng WLED, nhưng bạn cũng có thể gộp lại chạy chung trên một ESP. Mình cấp nguồn bằng bộ nguồn 12V 30A hơi “dư” công suất, chắc bạn không cần tới mức đó đâu. Cuối cùng, mọi thứ có thể bắt vít bằng ốc M3 và M4; phần cứng bổ sung duy nhất bạn cần là 2 vòng bi 12x8x7mm.
Giấy phép

File mô hình






















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!