Fingerbot v1 – Tool bấm nút tự động cho home automation

Fingerbot v1 là tool bấm nút tự động cho home automation, dùng ESP8266 (WeMos D1 Mini Pro) và micro servo 9G, cấu hình bằng ESPHome để tích hợp Home-Assistant. Có mẹo dùng pin cúc áo để bấm nút cảm ứng điện dung.




Mô tả
General
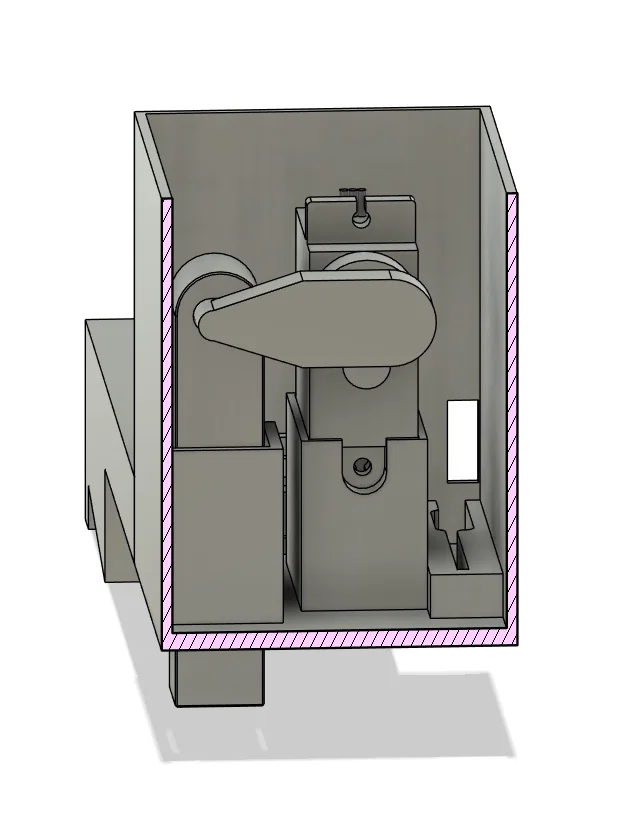
Đây là phiên bản của mình khi làm một món công cụ đơn giản để tự động bấm nút giùm mình.
Mình đang cố tự động hoá những việc dễ bị quên hoặc làm hoài thấy hơi mệt, nên để bắt đầu cho con Vacuum-Robot đời cũ không có Wi‑Fi chạy đều đặn, mình làm cái button-presser đơn giản này. Ban đầu mình tính model một cái “ngón tay” cho đẹp, nhưng làm vậy lại không hiệu quả lắm, nên chỉ còn cái tên “Fingerbot” giữ lại. v1 hoàn toàn mở cho mọi người tuỳ ý tạo thêm và mở rộng theo ý thích.
Printing
Mình in bằng chút PLA còn dư từ dự án khác. Không có yêu cầu đặc biệt.
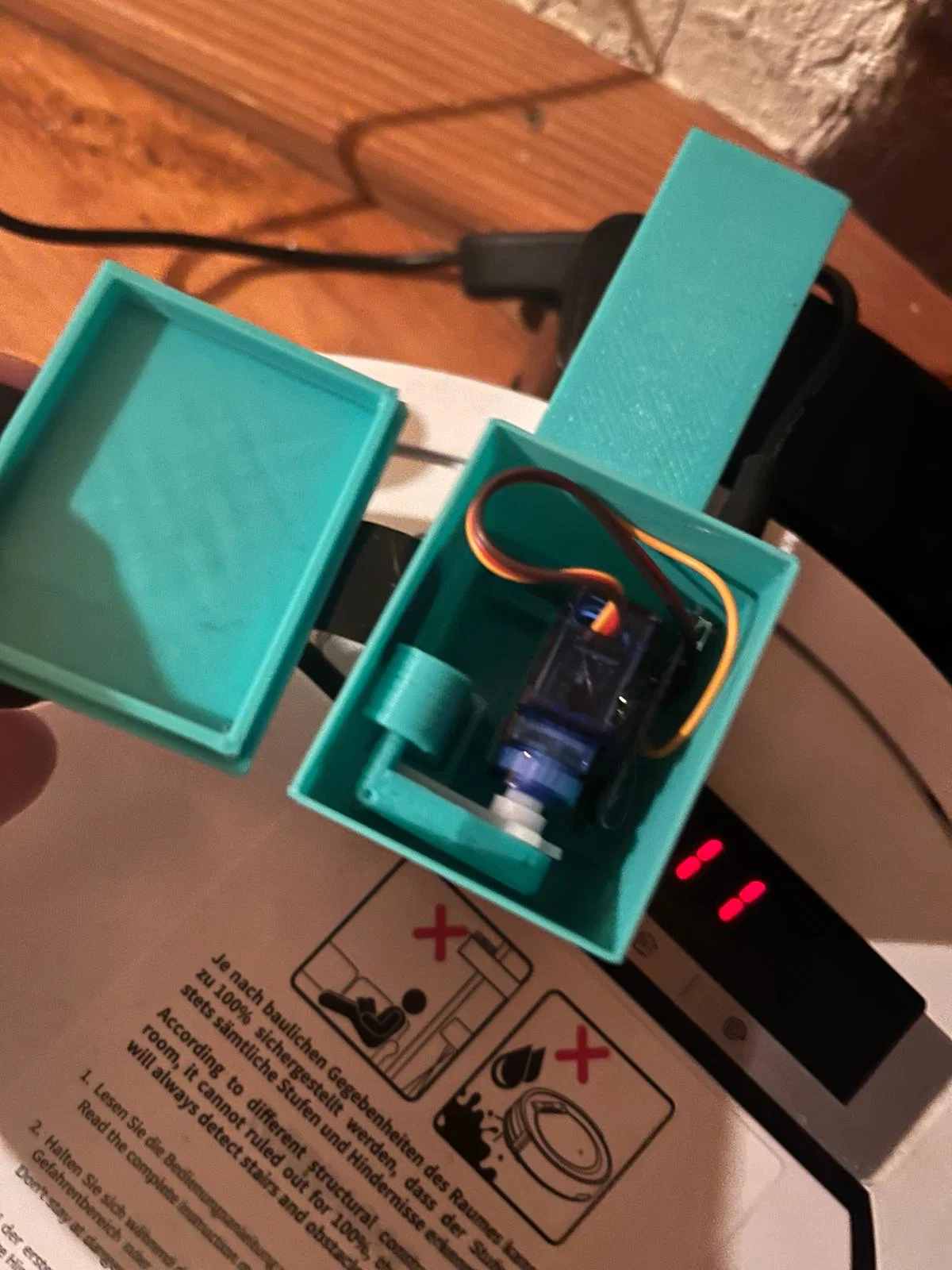
Electronics
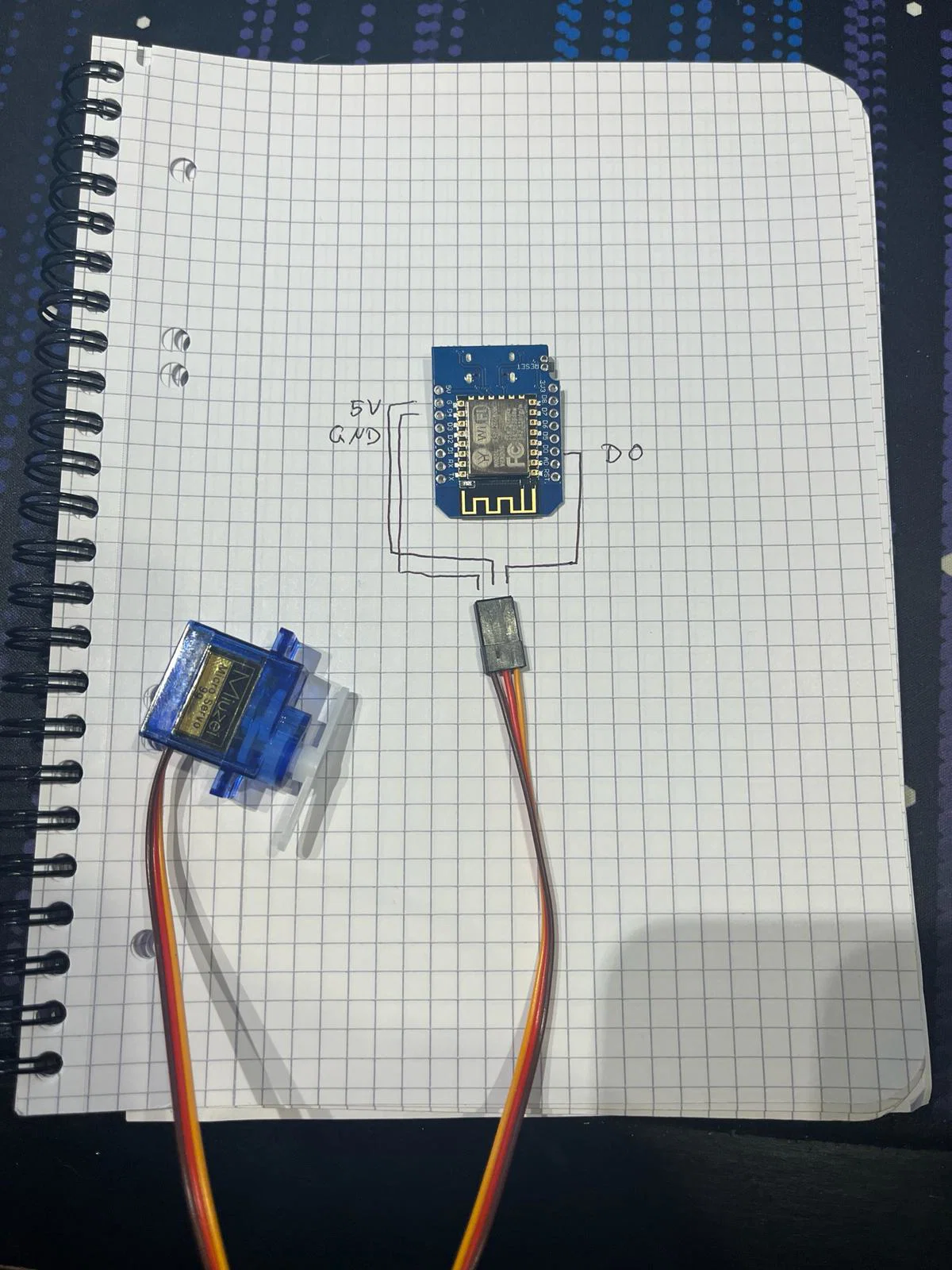
Phần điện tử siêu đơn giản: mình dùng WeMos D1 Mini Pro (ESP8266) từ AliExpress và một con Miuzei Micro Servo 9G nhỏ mình có sẵn.
Đấu dây cũng rất đơn giản: chỉ cần nối Servo vào GND, 5V và D0 của board như trong hình wiring.
Programming
Phần lập trình mình dùng ESPHome để tích hợp vô Home-Assistant cho nhanh gọn. Để cấu hình Servo sử dụng, bạn có thể dùng config sau:
output:
- platform: esp8266_pwm
pin: GPIO16
frequency: 50 Hz
id: d0_output
servo:
- id: d0_servo
output: d0_output
number:
- platform: template
name: Servo Control
min_value: -100
initial_value: 0
max_value: 100
step: 1
optimistic: true
set_action:
then:
- servo.write:
id: d0_servo
level: !lambda 'return x / 100.0;'Phần output định nghĩa chân mà servo đang cắm vào (D0 = GPIO16 trên ESP) và cả tần số (servo của mình dùng 50Hz). Phần servo khai báo là có một servo được kết nối, còn phần number là để Home-Assistant điều khiển được; vì servo không được homeassistant hỗ trợ “native”, nên mình map góc quay servo thành một giá trị số từ -100 tới 100.
Capacitive Buttons
Như một số bạn thấy trong hình, con Vacuum-Robot dùng màn hình cảm ứng điện dung (capacitive). Vì vậy chỉ dùng một cái “pin” bằng PLA để bấm thì không ăn, cần phải có một chút dòng điện chạy qua.
Để Fingerbot hoạt động được, mình dùng một mẹo đơn giản mình tìm được lúc nghiên cứu: dùng cực âm (negative pole) của pin. Mình dán một viên pin cúc áo vào đầu fingerbot bằng keo nến (hotglue) và chạy ngon lành.
Nếu bạn muốn tự làm: bôi keo nến lên mặt dương (positive side), đặt lên cái Fingerbot-Pin, rồi hạ pin xuống nút bấm khi keo vẫn chưa cứng. Làm vậy viên pin sẽ áp sát mặt nút để đảm bảo đủ diện tích tiếp xúc.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình






Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!