Đế nối Misumi SAR230 hỗ trợ linh kiện goBilda cho robot FTC/FRC

Bạn đang tìm kiếm giải pháp kết nối hệ thống thanh trượt Misumi SAR230 với các linh kiện goBilda cho robot của mình? Mẫu đế nối (insert) 3D này là lựa chọn hoàn hảo để giúp bạn giải quyết bài toán cơ khí đó. Được thiết kế chuyên biệt cho các đội chơi robotics FTC và FRC, phụ kiện này giúp cố định ốc vít, đai ốc và vòng bi một cách chính xác, đảm bảo độ ổn định cao nhất cho hệ thống chuyển động của robot. Với thiết kế nhỏ gọn, dễ in và lắp đặt, đây là phụ kiện không thể thiếu trong kho linh kiện của bất kỳ kỹ sư robot nào. Hãy lưu ý in bằng vật liệu PETG hoặc ABS để đảm bảo độ bền tối đa và dũa nhẹ các lỗ vít sau khi in để có độ khớp hoàn hảo nhất khi lắp ráp thực tế.
Mô tả
Phụ kiện đế nối cho thanh trượt Misumi SAR230
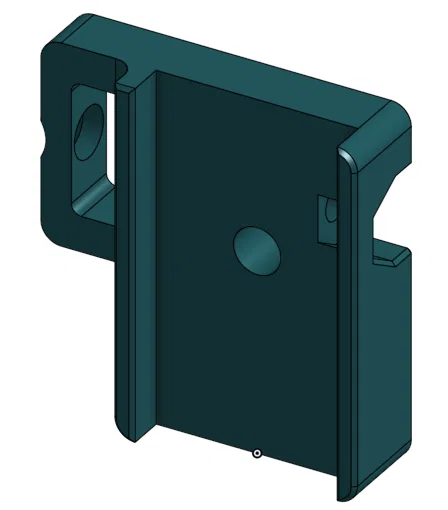
Nếu bạn đang tham gia các giải đấu robotics như FTC hoặc FRC và đang sử dụng hệ thống thanh trượt Misumi SAR230, thì đây chính là linh kiện mà bạn cần. Mẫu thiết kế này là một đế nối (insert) được tối ưu hóa để kết hợp thanh trượt Misumi với các linh kiện từ hệ sinh thái goBilda một cách dễ dàng và chắc chắn nhất. Việc thiết kế các chi tiết cơ khí tương thích luôn là một thử thách lớn, nhưng với mẫu in 3D này, mọi việc sẽ trở nên thuận tiện hơn bao giờ hết.
Đế nối được thiết kế chuyên dụng để giữ các loại ốc, đai ốc và vòng bi của goBilda. Nhờ vào kích thước chuẩn xác, phụ kiện này giúp cố định các bộ phận chuyển động trên thanh trượt một cách ổn định, giảm thiểu rung lắc khi robot vận hành ở tốc độ cao. Đây là giải pháp tiết kiệm chi phí nhưng cực kỳ hiệu quả cho các đội chơi muốn tùy biến khung sườn robot mà không cần phải gia công kim loại phức tạp.
Để đạt được kết quả tốt nhất khi in, bạn nên lưu ý một số điều sau đây:
- Vật liệu in: Ưu tiên sử dụng PETG hoặc ABS/ASA để đảm bảo độ bền cơ học và chịu nhiệt tốt hơn PLA, đặc biệt là khi robot phải hoạt động liên tục trong môi trường thi đấu.
- Độ bền: Nên thiết lập phần trăm in đặc (infill) cao từ 40-60% hoặc sử dụng nhiều lớp vỏ (walls) để đảm bảo độ cứng chắc cho các lỗ bắt ốc.
- Hậu kỳ: Sau khi in xong, bạn nên dùng dũa nhỏ để xử lý lại các lỗ bắt vít nếu cảm thấy chưa vừa ý, điều này giúp các chi tiết goBilda được lắp ráp khớp hoàn toàn mà không bị lỏng lẻo.
- Độ chính xác: Bạn nên in thử một bản mẫu (prototype) để kiểm tra độ khít với thanh trượt SAR230 trước khi in hàng loạt cho toàn bộ hệ thống robot.
- Ứng dụng thực tế: Mẫu thiết kế này rất phù hợp để lắp đặt cơ cấu nâng hạ hoặc cánh tay robot sử dụng ray trượt, giúp kết nối cơ khí giữa hệ thống ray Misumi và các module của goBilda một cách mượt mà và an toàn nhất.
Giấy phép
File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!