Mô hình Robot đi bộ Theo Jansen 2 động cơ DC - Dự án in 3D thú vị

Khám phá ngay mô hình robot đi bộ độc đáo dựa trên cơ chế Theo Jansen nổi tiếng, được thiết kế để in 3D hoàn hảo với sự hỗ trợ của 2 động cơ DC. Đây là một dự án DIY lý tưởng dành cho những ai yêu thích cơ khí và muốn tìm hiểu về cách vận hành của các khớp nối phức tạp. Mô hình không chỉ sở hữu vẻ ngoài hiện đại mà còn mang tính ứng dụng cao trong việc học hỏi về kỹ thuật. Trong bài viết này, chúng tôi sẽ hướng dẫn chi tiết về cách lựa chọn vật liệu in 3D tối ưu như PLA hoặc PETG, các lưu ý quan trọng để tránh sai số khi in bánh răng, cũng như mẹo lắp ráp hệ thống truyền động để robot có thể đi bộ một cách trơn tru nhất. Đừng bỏ lỡ cơ hội sở hữu một sản phẩm công nghệ tuyệt vời ngay tại nhà!
Mô tả
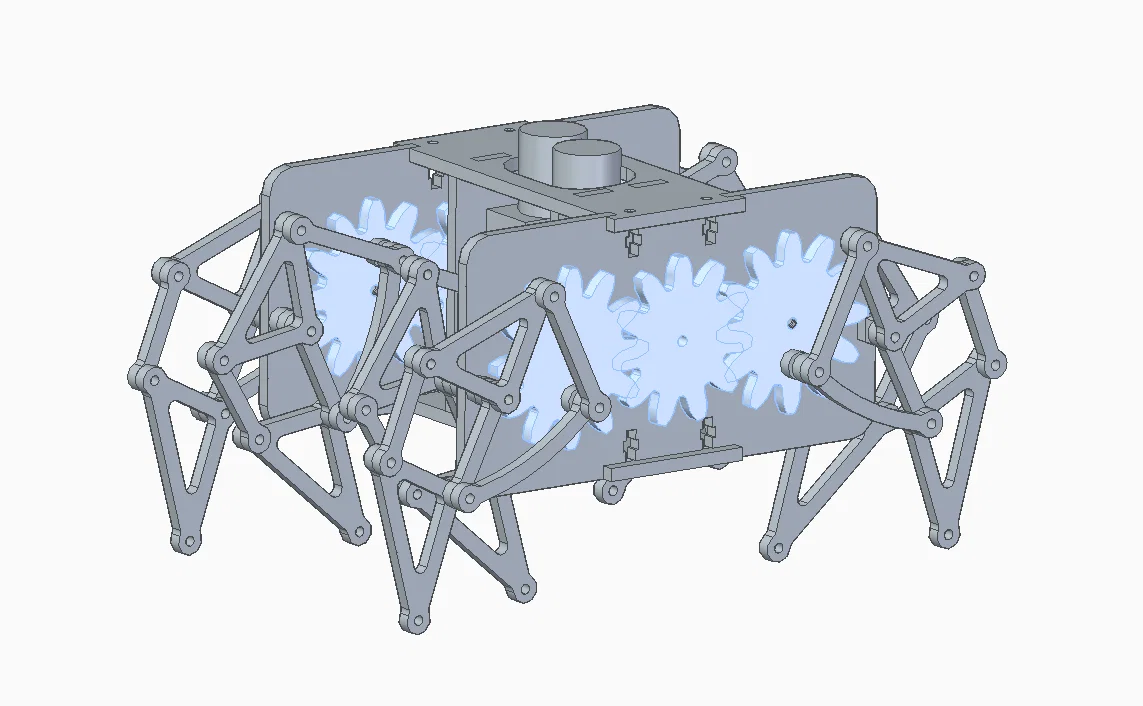
Robot đi bộ theo cơ chế Theo Jansen với 2 động cơ DC
Bạn có phải là một người đam mê cơ khí và robot không? Nếu có, dự án robot đi bộ dựa trên cơ chế Theo Jansen (Theo Jansen Walking Robot) này chắc chắn sẽ làm bạn cực kỳ thích thú. Đây là một mô hình mô phỏng chuyển động kỳ diệu của các khớp nối, được thiết kế tinh tế để có thể di chuyển trên bề mặt phẳng bằng cách sử dụng 2 động cơ DC. Không chỉ là một món đồ chơi thông thường, đây là một ví dụ tuyệt vời về kỹ thuật và tư duy sáng tạo trong ngành chế tạo robot.
Toàn bộ khung thân và hệ thống bánh răng được tối ưu hóa để in 3D một cách chính xác nhất. Với cấu trúc liên kết phức tạp, robot này cho phép các chân di chuyển nhịp nhàng, tạo ra dáng đi trông rất tự nhiên. Việc lắp ráp mô hình này đòi hỏi sự tỉ mỉ, từ việc lắp các khớp nối cho đến việc gắn hệ thống truyền động. Khi hoàn thiện, bạn sẽ có một sản phẩm đầy tính nghệ thuật và công nghệ ngay trên bàn làm việc của mình, một dự án DIY không thể bỏ qua.
Dưới đây là một số thông tin quan trọng để bạn có thể in và lắp ráp thành công mô hình này:
- Vật liệu đề xuất: Nên dùng nhựa PLA hoặc PETG để đảm bảo độ cứng cáp và chính xác cho các khớp nối nhỏ.
- Cấu trúc: Thiết kế sử dụng 2 động cơ DC làm nguồn cấp lực chính, giúp robot di chuyển ổn định hơn so với dùng một động cơ.
- Lưu ý khi in 3D: Hãy in với layer height 0.16mm hoặc 0.2mm để các bánh răng có độ mịn cao nhất, tránh ma sát thừa gây kẹt máy.
- Hỗ trợ (Support): Cần đặt support hợp lý tại các phần khớp nối phức tạp để giữ nguyên hình dạng thiết kế gốc.
- Lắp ráp: Sử dụng thêm các ốc vít nhỏ và dây điện phù hợp để kết nối động cơ với nguồn điện (pin 9V hoặc hộp pin tiểu).
- Kiểm tra: Sau khi in xong, hãy vệ sinh thật kỹ các cạnh nhựa thừa ở khớp nối để robot vận hành mượt mà, không bị khựng giữa chừng.
Nhìn chung, đây là một dự án 3D đầy thú vị, giúp bạn hiểu rõ hơn về nguyên lý vận hành của các cỗ máy cơ học cổ điển được cách tân bằng công nghệ hiện đại. Hãy kiên nhẫn lắp ráp và tận hưởng thành quả khi robot bắt đầu những bước đi đầu tiên của nó nhé!
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!