Easy Beest – Strandbeest modular in 3D với cụm chân print-in-place

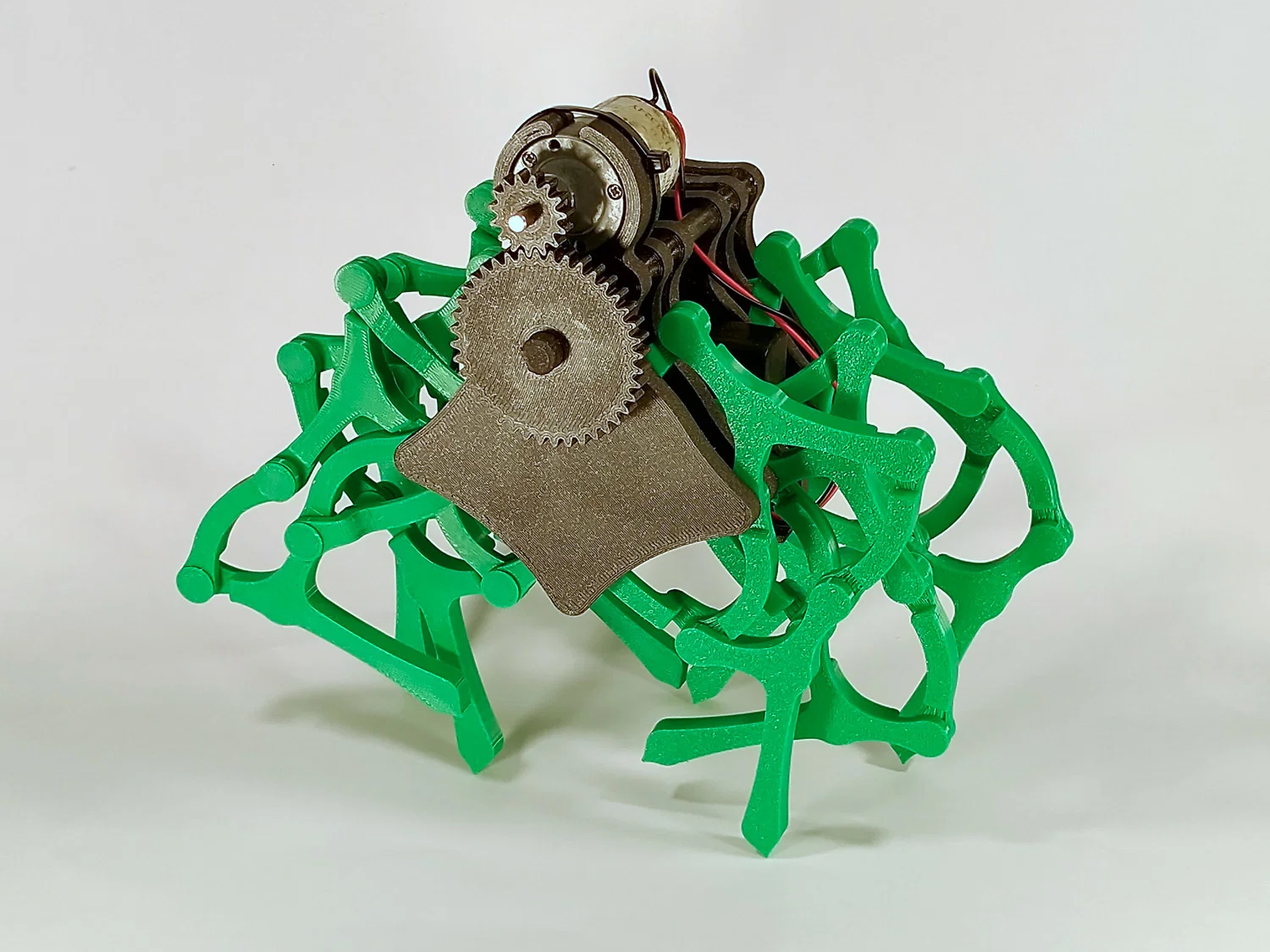
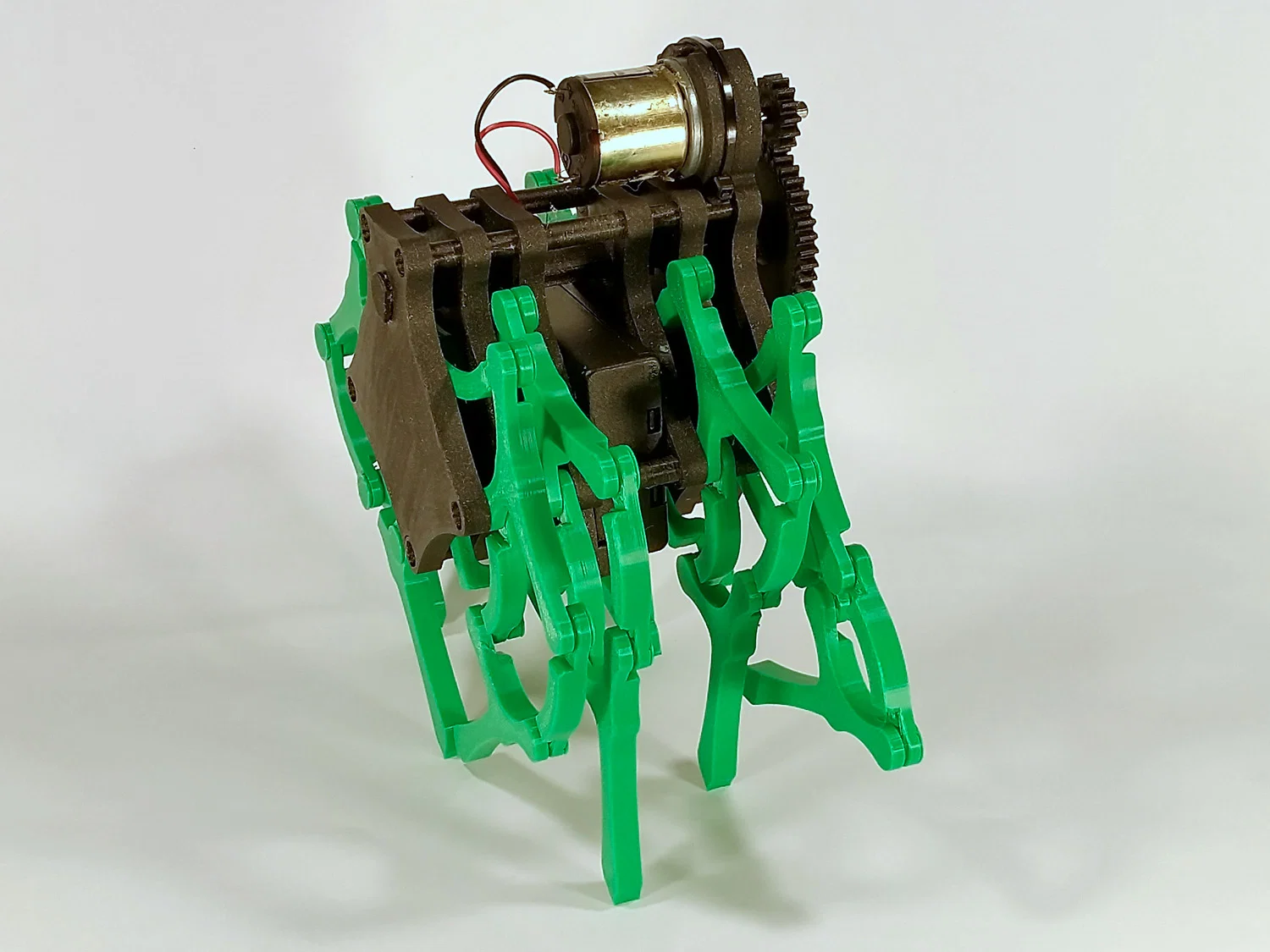
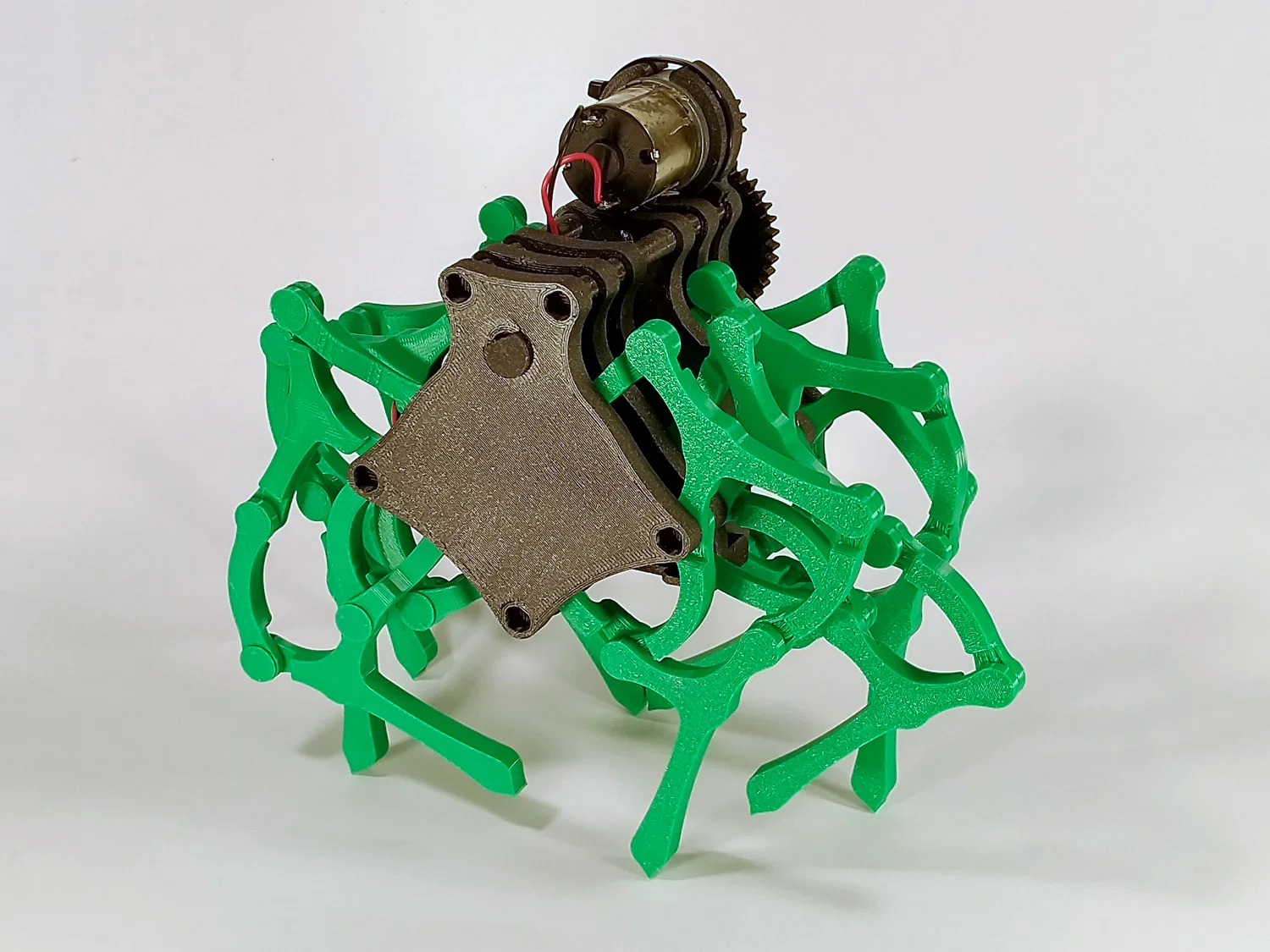
Easy Beest là mẫu Strandbeest đơn giản hóa, modular, dùng cụm chân print-in-place và truyền động bằng gear nên dễ ráp hơn. Có bản chạy motor hoặc quay tay bằng knob; in PLA 0.2mm và canh press fit kỹ để chạy mượt.



Mô tả

Đây là phiên bản đơn giản hóa của sinh vật/tác phẩm điêu khắc động học Strandbeest nổi tiếng của Theo Jansen. Đa số mẫu Strandbeest in 3D mà mình thấy thường có “cả tỷ” chi tiết, còn bản này được đơn giản lại bằng cách: 1) cụm chân đa phần là print-in-place, in xong gần như đã ráp sẵn, và 2) thay cụm trục khuỷu phức tạp bằng hệ truyền động bằng gear. Gear thì không đúng “chất” thẩm mỹ Strandbeest nguyên bản lắm, nhưng bù lại ráp dễ hơn nhiều.
Mẫu này cũng khá modular: bạn muốn thêm bao nhiêu cụm chân cũng được, và có thể dùng bản chạy motor (như hình), hoặc cũng có sẵn bộ phận để quay tay bằng núm (knob).
Nếu bạn in phiên bản chạy motor như minh họa, bạn sẽ cần thêm các phần sau:
1 motor (https://www.amazon.com/Driver-Engine-HN-GH12-1035Y-Motor-Reduction/dp/B0CFZ9KYKJ)
1 hộp pin (battery box) (https://www.pololu.com/product/1152)
3 pin AA
In ấn
Tất cả chi tiết được in bằng PLA với layer 0.2mm, 3 perimeters và 15% infill. Điểm chỉnh duy nhất so với setting in tiêu chuẩn là các “trụ” (posts) trên các plate cần in chậm hơn để lớp bám dính tốt. Mình làm bằng cách đặt small perimeter threshold = 20mm rồi chỉnh small perimeter print speed = 40mm/s.
Quan trọng: Trước khi in toàn bộ chi tiết, mình khuyến nghị mạnh là in thử 2 cái test pegs (trong thư mục tools) để kiểm tra độ khít, vì cả kết cấu phụ thuộc vào press fit đúng chuẩn. Hai peg nên gắn chồng được với mức press fit trung bình (khít vừa, chắc tay nhưng không phải kiểu kéo ra không nổi). Nếu quá chặt hoặc quá lỏng, bạn có thể chỉnh X-Y contour compensation để ra đúng độ khít. Khi bạn in xong tất cả plate, thử press fit ráp chồng hết lại thành một cọc (chưa lắp chân hay gear). Sau đó dùng pry bar (có trong thư mục tools) để nạy nhẹ tách ra trước khi bắt đầu ráp hoàn chỉnh.
Để in những gì:
Bạn sẽ thấy trong thư mục parts đầu tiên: mỗi “tầng chân” (leg layer) cần 2 leg units, base, gear 40t, gear 15t và clip. Bạn muốn bao nhiêu tầng chân thì in bấy nhiêu bộ. Trường hợp con beest chạy motor như hình thì in 4 bộ.
Thư mục thứ hai chứa các chi tiết chỉ cần 1 cái cho mỗi beest. Lưu ý: nếu bạn in bản không motor, có thể bỏ qua battery plate, motor plate, drive gear và drive pinion; thay vào đó in một trong các end plates và cái knob nằm trong thư mục non-motorized.
Cuối cùng, nếu bạn muốn thêm nhiều chân hơn, bạn cần scale cái shaft theo đúng hướng X để tăng chiều dài tương ứng với số chân bạn muốn. (Mình không khuyên quá 5 chân cho bản chạy motor vì motor có thể không đủ lực.)
Lắp ráp
Đầu tiên là vài lưu ý chung. Sau khi bạn bẻ nhẹ cho các khớp chân “bung” ra khỏi trạng thái print-in-place, bạn nên chà nhám nhẹ mặt dưới ở phần đầu các thanh liên kết (links) tự do, chỗ nào còn hơi sần sùi. Bạn cũng nên chà nhám nhẹ mặt của gear 40t và dọc theo chiều dài của shaft. Mình khuyên bôi một ít mỡ loãng hoặc vaseline lên răng gear và các bề mặt trượt.

Trước hết, hàn dây từ battery box vào motor. Đấu cực (polarity) thật ra không quan trọng.

Ép (press) gear dẫn động 15t vào trục motor. Lưu ý nếu bạn lật gear theo hướng này hay hướng kia thì gear sẽ vào sâu trên trục khác nhau một chút. Hãy dùng đúng hướng như hình.

Bắt đầu bằng cách đẩy shaft xuyên lên từ mặt sau của một base plate. Đặt một gear 40t vào trụ giữa (center post). Ép gear 15t lên shaft và đẩy xuống để nó ăn khớp (meshes) với gear 40t. Trượt một clip vào shaft cho tới khi nó tì sát gear 15t. Xoay shaft để chắc chắn mọi thứ chạy mượt.

Lắp một leg unit vào bên trái base plate như hình. Lưu ý: thanh link tự do phía trên của chân sẽ đi qua trụ gear trước, rồi tới thanh link tự do phía dưới.

Lấy một leg unit khác, lật ngược lại và lắp vào bên phải base plate. Chú ý kỹ thứ tự xếp chồng của tất cả các thanh link tự do lên trụ gear.

Một trong những đoạn khó hơn là giữ các thanh link đúng vị trí khi bạn ép base plate tiếp theo lên trên cái đầu tiên. Mình thấy cách hiệu quả là đặt một cây thước thép phẳng hoặc lưỡi cưa sắt (vật mỏng và cứng) ngang qua phía trên trụ gear và phần đầu các link để giữ chúng không bị tuột, trong lúc ép plate kế tiếp.

Ép base plate tiếp theo xuống cho tới khi chạm vào cây thước phẳng. Rút thước ra, rồi ấn thêm lần cuối vào cả 5 trụ để chắc chắn chúng đã vào hết cỡ. Xoay shaft để kiểm tra chạy mượt.
Lưu ý: trước khi làm tiếp, bạn nên xoay shaft để chỉnh vị trí chân sao cho các “bàn chân” gần như chạm nhau. Việc này quan trọng để canh đúng phase giữa các bộ chân về sau.

Đặt gear 40t tiếp theo lên trụ giữa, đảm bảo trụ gear nằm ở vị trí 6 giờ như hình. (Nhớ đảm bảo bộ chân đầu tiên không bị xê dịch khỏi vị trí như hình ở bước trên.) Sau đó thêm gear 15t và clip.

Lắp bộ chân tiếp theo giống như bộ đầu tiên.

Trượt battery plate vào shaft và xuống plate thứ hai, tiếp tục dùng thước thép phẳng để giữ đầu các link không bị rớt khỏi trụ gear.
Nếu làm bản không motor, bỏ qua bước này.

Thêm base plate tiếp theo, gear 40t, gear 15t và clip. Lưu ý: với bộ chân thứ 3 này, trụ gear nên ở vị trí 3 giờ.

Lắp bộ chân thứ 3 như trước.

Thêm base plate thứ 4, gear 40t, gear 15t và clip. Lưu ý: trụ gear của bộ chân thứ 4 nên ở vị trí 9 giờ.

Thêm bộ chân thứ 4 rồi đậy lại bằng motor plate.

Luồn battery box vào khay ở giữa con beest. Công tắc (switch) nên xoay đúng chiều để khớp vào rãnh trên battery plate. Hộp pin chỉ được giữ bằng trọng lực — muốn tháo thì chỉ cần nghiêng ra là lấy được.
Nếu làm bản không motor, nhảy tới bước cuối.

Gắn motor vào cái clip trên đỉnh motor plate, và xoay sao cho trục motor nằm cao nhất có thể.

Trượt drive gear vào main shaft. Xoay motor để drive pinion ăn khớp với drive gear. Quấn thêm một sợi zip tie quanh clip và hộp số (gearhead) để khóa motor chắc hơn. Cuối cùng gắn thêm một clip nữa vào đầu còn lại của main shaft.
Nếu làm bản không motor, gắn knob vào main shaft, rồi gắn thêm một clip cuối.
Vận hành
Cầm cụm bằng phần motor (dễ bị kẹt tay vào các khớp link của chân) rồi bật công tắc trên battery box. Vị trí công tắc không tiện lắm cho ứng dụng này, nên có thể bạn phải dùng đầu bút chì để gạt công tắc. Tất cả chân sẽ bắt đầu chuyển động. Nếu bạn giữ đúng phase của chân trong quá trình lắp, bạn có thể đặt nó xuống mặt phẳng mịn để nó không bị té, và lý tưởng hơn nữa là nó sẽ bắt đầu “đi”.
Do cơ cấu link của chân rất phi tuyến (non-linear), các “bàn chân” đang chạm đất sẽ không di chuyển cùng tốc độ y hệt nhau. Vì vậy, bạn cần chạy nó trên mặt bàn/mặt bếp phẳng mịn để các bàn chân có thể trượt nhẹ tương đối với nhau. Chạy trên bề mặt vải sẽ làm chân bị kẹt (bind up) và khả năng cao nó sẽ té hoặc bị kẹt motor. (Đừng để motor chạy trong trạng thái bị kẹt!) Thật ra mình nghĩ đây là lý do nó là “strand” (bãi biển trong tiếng Hà Lan) beest chứ không phải kiểu “street beest” — cát có thể “nhường” cho chênh lệch tốc độ của bàn chân, đồng thời vẫn tạo chút lực cản để đẩy chân đi.
Giấy phép

File mô hình














Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!