Chân đế giảm rung, chống ồn cho Elegoo Neptune 3/4 (kèm đế lót TPU)

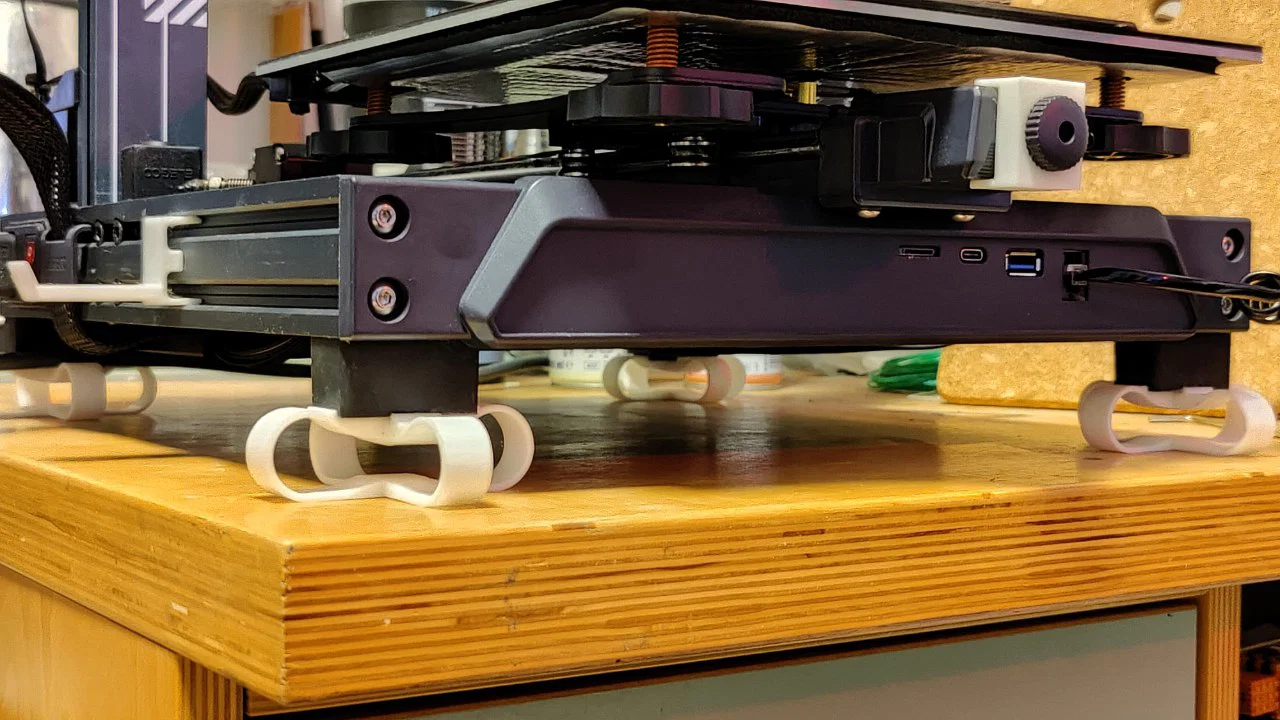
Bộ chân đế giảm rung ồn cho dòng Elegoo Neptune 3 & 4. Thiết kế ngàm chắc chắn, tích hợp đế lót TPU chống trượt. Giúp máy vận hành êm ái hơn, hạn chế rung lắc bàn và tận dụng không gian trống bên dưới máy.







Mô tả
Chào mọi người,
Mình vừa tinh chỉnh lại mẫu ngàm đa năng mà mình đã phối lại trước đây để dùng tốt hơn với dòng Neptune 3 và 4. Mình đảm bảo kích thước vừa khít cho dòng 4 và 4 Pro với chân đế 20x38.5mm. Với các máy khác trong series thì khả năng cao là vừa nhưng mình chưa có điều kiện thử nghiệm thực tế.
Công dụng chính là giảm tiếng ồn truyền xuống bàn làm việc, đồng thời giúp cải thiện chất lượng in nhờ giảm rung chấn từ đầu in, dù mình không thể kiểm chứng khoa học. Điểm cộng nữa là bạn có thể tận dụng không gian trống bên dưới để cất dụng cụ.
Cập nhật V2:
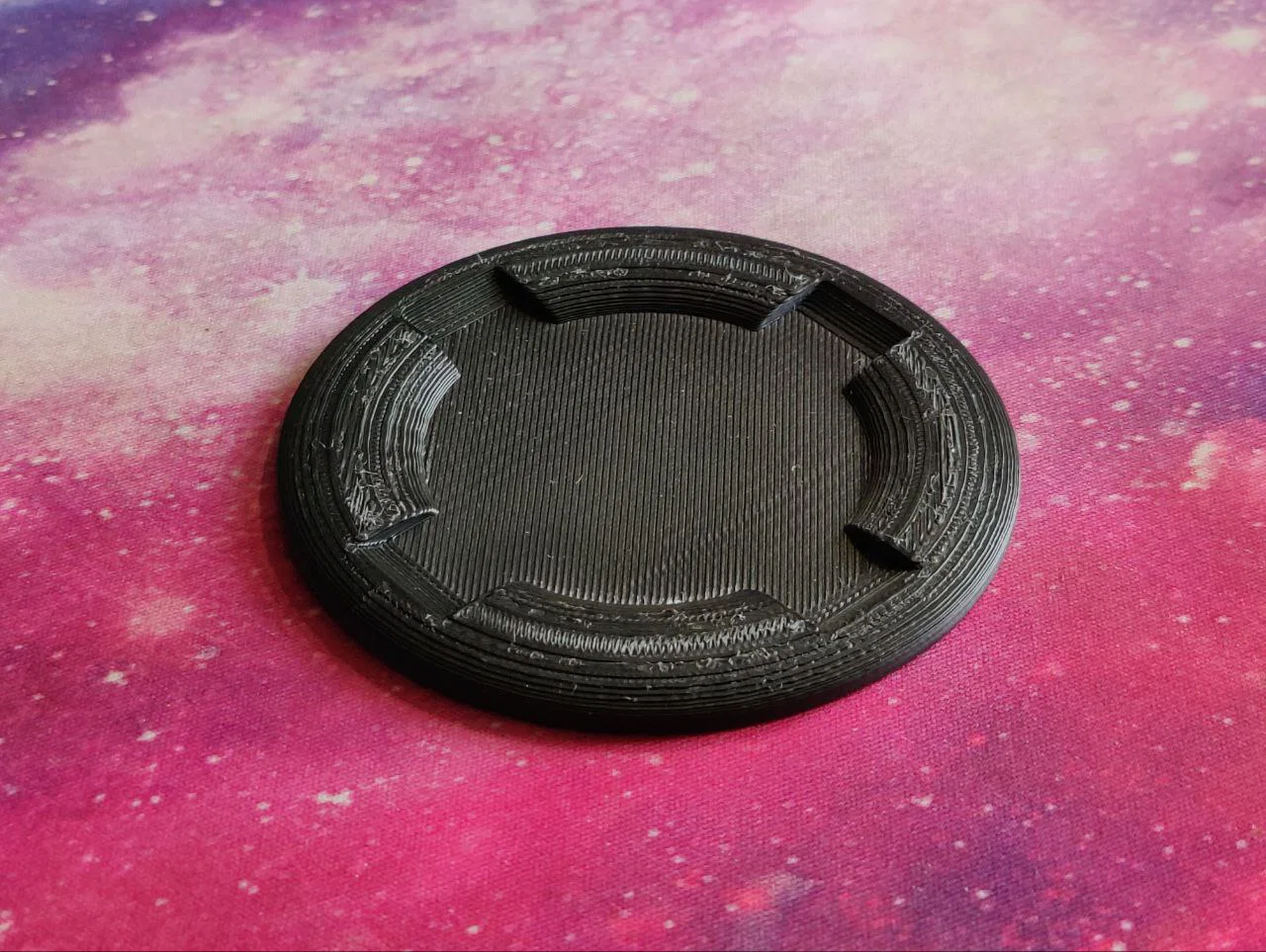
- Thêm đế lót (coasters) để chống trượt và tăng độ ổn định. Nên in bằng TPU để bám mặt bàn tốt nhất.
Mình chưa có sẵn TPU nên dùng PLA+ thì bị trơn tuột, mọi người nhớ dùng TPU nhé.
- Cảm ơn u/DeathCoreGuitar vì ý tưởng hay ho này :)
- Đã làm phẳng mặt trên của vòng, mở rộng hơn so với V1 vốn bị giới hạn bởi các khe.
Kích thước là cố định (75mm). Nếu bạn phóng to/thu nhỏ, khoảng cách các khe giữ chân sẽ bị thay đổi. Mình đã thử nghiệm chịu lực 10kg trên một cái mà không hề hấn gì, nên bản Max cũng sẽ dùng thoải mái.
Bạn có thể in 4 cái cùng lúc hoặc in lẻ. Mình in bằng PLA+ nhưng sau vài tuần thấy bắt đầu có hiện tượng bị biến dạng do tải trọng (creep), nên mình sẽ in lại bằng PETG. PETG hoặc vật liệu dẻo hơn sẽ bền hơn, đặc biệt với máy cỡ lớn như Plus hay Max.
Lưu ý vị trí đường seam (đường nối lớp), nếu nó nằm ngay giữa đường cong thì vòng sẽ dễ bị nứt khi lắp.
Thông số in (Slicing):
- Máy in: Elegoo Neptune 4 Pro
- Slicer: Orca
- Nhựa: AnkerMake PLA+ tại 210°C, flow 0.97, PA 0.04
- Tốc độ quạt: Min 30% Max 40% Overhang 60%
- Nozzle: 0.4mm đồng
- Retraction: 1.2mm@50mm/s, threshold 0.5mm
- Wipe: 1.2mm@100%
- Z-Hop: [email protected]
- Chiều cao lớp: 0.2mm, lớp đầu 0.28mm
- Độ rộng đường in: 0.4mm (Arachne), lớp đầu 0.44mm
- Seam: Mặt sau, gap 20%, không dùng scarf
- Wall loops: 2
- Solid infill: Monotonic
- Sparse Infill: Gyroid@20%
- Tốc độ: 50mm/s cho lớp đầu, 150mm/s cho tường ngoài, 200mm/s cho các phần còn lại
- Gia tốc: 500mm/s² lớp đầu, 1500mm/s² tường ngoài, 2000mm/s² còn lại
- Support: Không
- Raft/Brim/Skirt: Không (nếu khó bám thì dùng thêm mouse ears và chỉnh Z-Offset cho chuẩn).
Có cần hiệu chỉnh lại máy không?
Có, bạn nên hiệu chỉnh lại Input Shaping sau khi:
- Thay đổi phần cứng ở đầu in hoặc bàn nhiệt (làm thay đổi khối lượng).
- Chỉnh lại độ căng đai (dây curoa).
- Di chuyển máy sang bàn khác.
- Thay đổi bề mặt tiếp xúc giữa máy và bàn (dùng chân đế mới, tấm bê tông, v.v.).
N4 và N4P không có sẵn cảm biến gia tốc (accelerometer), Plus và Max thì có. Dù có dùng chân đế này hay không, mình vẫn khuyên nên lắp thêm cảm biến gia tốc cho N4/N4P vì mặc định của hãng không được tối ưu lắm. Có cảm biến sẽ giúp chất lượng in tốt và nhanh hơn nhiều.
Nếu có thắc mắc hay gặp vấn đề gì, cứ nhắn tin cho mình nhé! :)
Giấy phép

File mô hình







Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!