Mô hình tay gắp robot (Gripper) cơ khí 2 ngón in 3D

Khám phá ngay mô hình tay gắp robot (Gripper) hai ngón cực kỳ hữu ích cho các dự án cánh tay cơ khí của bạn. Được thiết kế chuyên biệt với cơ cấu bánh răng linh hoạt, mô hình này giúp việc cầm nắm các vật thể nhỏ trở nên dễ dàng và chính xác hơn bao giờ hết. Đây là lựa chọn lý tưởng cho các bạn học sinh, sinh viên hoặc người chơi hệ công nghệ muốn nâng cấp robot của mình. Với hướng dẫn chi tiết về cách chọn vật liệu như PLA hay PETG và thiết lập thông số in phù hợp, bạn sẽ tự tay lắp ráp được một cơ cấu kẹp bền bỉ, mượt mà và đầy tính chuyên nghiệp. Đừng bỏ lỡ file 3D chất lượng này để hoàn thiện dự án robot của mình ngay hôm nay.



Mô tả
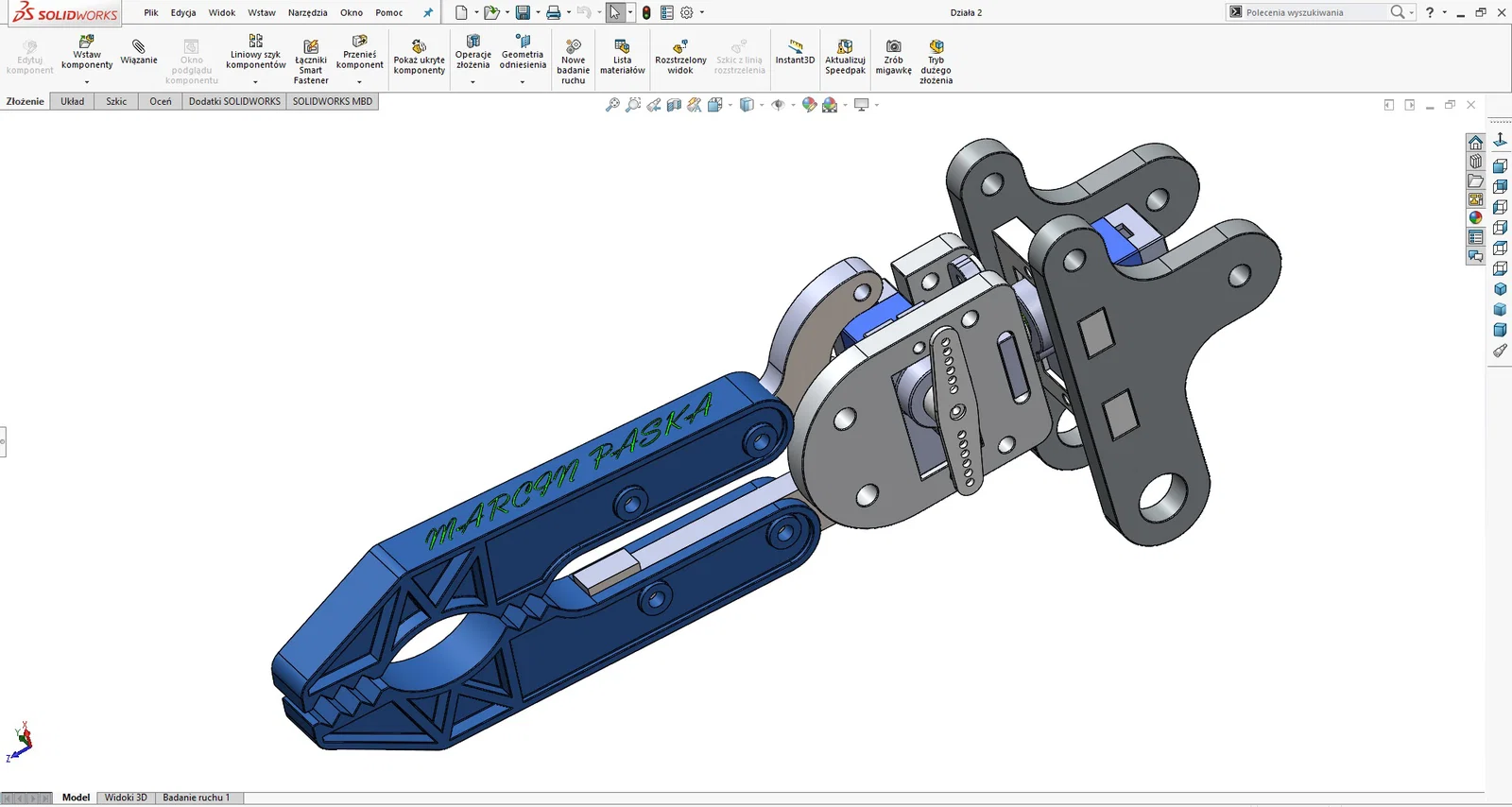
Mô hình tay gắp robot (Gripper) hai ngón
Mô hình này là một thiết kế cơ khí hoàn thiện cho bộ phận tay gắp của robot, thường được gọi là "gripper". Với cấu trúc hai ngón linh hoạt, mô hình này cho phép cánh tay robot có thể thực hiện thao tác cầm nắm, giữ và di chuyển các vật thể nhỏ một cách chính xác. Đây là giải pháp lý tưởng cho những ai đang đam mê nghiên cứu chế tạo robot, cánh tay cơ khí hoặc các dự án tự động hóa tại nhà. Thiết kế được tối ưu hóa để có thể lắp đặt dễ dàng với các loại động cơ servo tiêu chuẩn, giúp bạn nhanh chóng biến ý tưởng thành hiện thực.
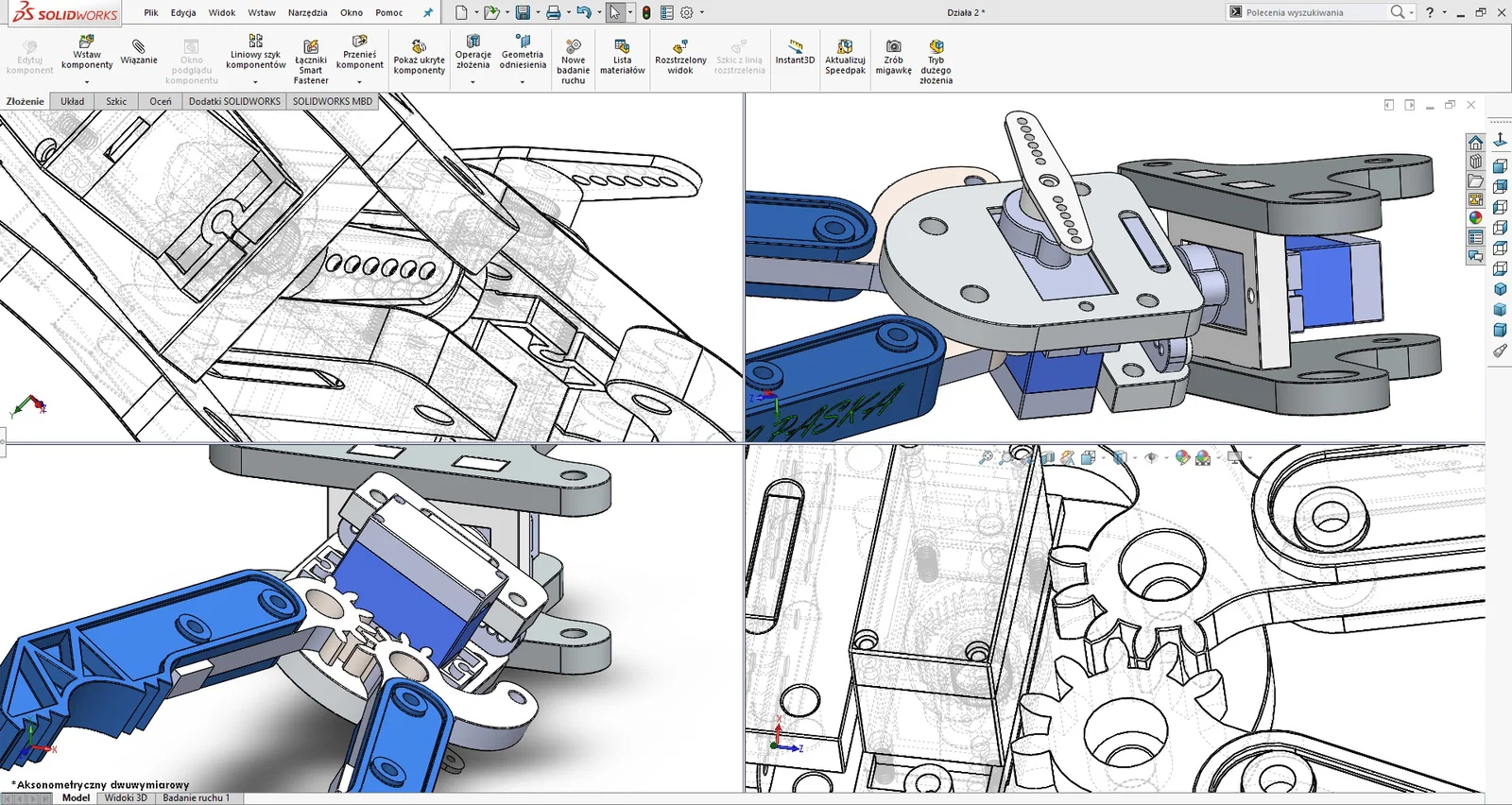
Sản phẩm này được thiết kế theo dạng khớp nối bánh răng, cho phép hai ngón tay đóng mở đồng bộ thông qua động cơ bên trong. Cấu tạo chi tiết của mô hình giúp việc chuyển động trở nên trơn tru, giảm thiểu độ rơ và tăng cường lực kẹp cần thiết. Bạn hoàn toàn có thể sử dụng mô hình này để ứng dụng vào việc gắp các vật phẩm nhẹ trong các mô hình thí nghiệm giáo dục hoặc giải trí. Sự kết hợp giữa tính thẩm mỹ và công năng kỹ thuật cao giúp bộ phận này trở thành một phần bổ sung tuyệt vời cho bất kỳ cánh tay robot nào.
Một số lưu ý quan trọng để bạn đạt được kết quả in 3D tốt nhất:
- Vật liệu in: Khuyến khích sử dụng nhựa PLA hoặc PETG để đảm bảo độ cứng vững, giúp các ngón tay không bị biến dạng khi thực hiện lực kẹp.
- Thông số in: Nên thiết lập độ phủ (infill) khoảng 30% đến 40% để tăng độ bền cho các chi tiết bánh răng và ngón gắp.
- Độ dày lớp in (layer height): Nên chọn mức 0.16mm hoặc 0.2mm để đảm bảo các chi tiết cơ khí, đặc biệt là phần răng cưa, được in ra sắc nét và chính xác nhất.
- Lắp ráp: Sau khi in xong, bạn cần làm sạch các bavia nhựa ở các khớp nối để đảm bảo sự linh hoạt tối đa khi cơ cấu chuyển động.
- Động cơ: Hãy đảm bảo bạn đã chuẩn bị sẵn loại động cơ servo phù hợp với kích thước lỗ gắn trên thiết kế trước khi bắt đầu lắp ráp hoàn thiện.
Với thiết kế thông minh và cấu trúc chắc chắn, bộ tay gắp robot này sẽ là công cụ đắc lực để nâng cấp các dự án DIY của bạn lên một tầm cao mới. Hy vọng bạn sẽ có những trải nghiệm lắp ráp thú vị với mô hình này.
Giấy phép

File mô hình
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!