Camera đầu phun (nozzle camera) cho Prusa XL

Bộ gắn nozzle camera cho Prusa XL, thiết kế để in không cần support và lắp dạng snap-fit. Dùng endoscope USB với Raspberry Pi chạy OctoPrint để xem cận cảnh chất lượng in, chẩn đoán lỗi và theo dõi từ xa.








Mô tả
Một nozzle cam (camera đặt gần đầu phun) trên máy in 3D mang lại khá nhiều lợi ích:
- Theo dõi chất lượng in: Cho phép quan sát chất lượng bản in theo thời gian thực, giúp phản ứng nhanh khi gặp lỗi như cong vênh (warping) hoặc vật liệu bị bong khỏi mặt bàn.
- Chẩn đoán sự cố: Camera giúp nhận diện và chẩn đoán các vấn đề kỹ thuật như nghẹt nozzle và lỗi bám lớp (layer adhesion), hạn chế lãng phí vật liệu.
- Giám sát từ xa: Nếu cần theo dõi bản in từ xa, nozzle cam giúp xem tiến độ mà không cần đứng cạnh máy.
- Tối ưu quy trình: Phân tích video từ camera có thể giúp tinh chỉnh setting của máy in, cải thiện chất lượng và hiệu suất.
- Hỗ trợ giảng dạy: Rất hữu ích cho giáo viên/người thuyết trình để minh hoạ quá trình in 3D từng lớp một cách chi tiết.
- Vui là chính: Nhìn “đã” lắm! Đặc biệt là cảnh parking và đổi toolhead nhìn cực kỳ cuốn!

Tóm lại, nozzle cam giúp mình kiểm soát quá trình in tốt hơn, cho ra kết quả ổn định hơn và vận hành hiệu quả hơn.
Prusa Connect tương tự OctoPrint và được Prusa Research phát triển riêng cho hệ máy của họ. Nó cho phép quản lý in từ xa, giám sát và xem thống kê chi tiết qua trình duyệt web. Prusa Connect có giao diện tích hợp chặt với hệ sinh thái Prusa. Nó có hỗ trợ camera, nhưng tiếc là frame rate rất thấp.
Vì vậy mình cần:
OctoPrint là phần mềm mã nguồn mở cho phép điều khiển và giám sát máy in 3D từ xa qua trình duyệt web. Thường sẽ cài trên Raspberry Pi để quản lý máy in mà không cần nối trực tiếp với máy tính. OctoPrint có các tính năng như upload file dễ dàng, điều khiển nhiệt độ, và cài thêm plugin để mở rộng chức năng. Mình dùng tutorial này để set up đúng cho 2 camera. Nên upgrade firmware trước, có thể giúp chất lượng WIFI tốt hơn.
Cái này sẽ được cài trên:
Raspberry Pi là dòng máy tính mini dạng single-board do Raspberry Pi Foundation phát triển. Mấy thiết bị nhỏ gọn này dùng được cho nhiều mục đích, từ dạy lập trình đến DIY và home automation nâng cao. Nó phổ biến nhờ giá dễ chịu, phần mềm open-source và tính linh hoạt.
Và mình gắn thêm:
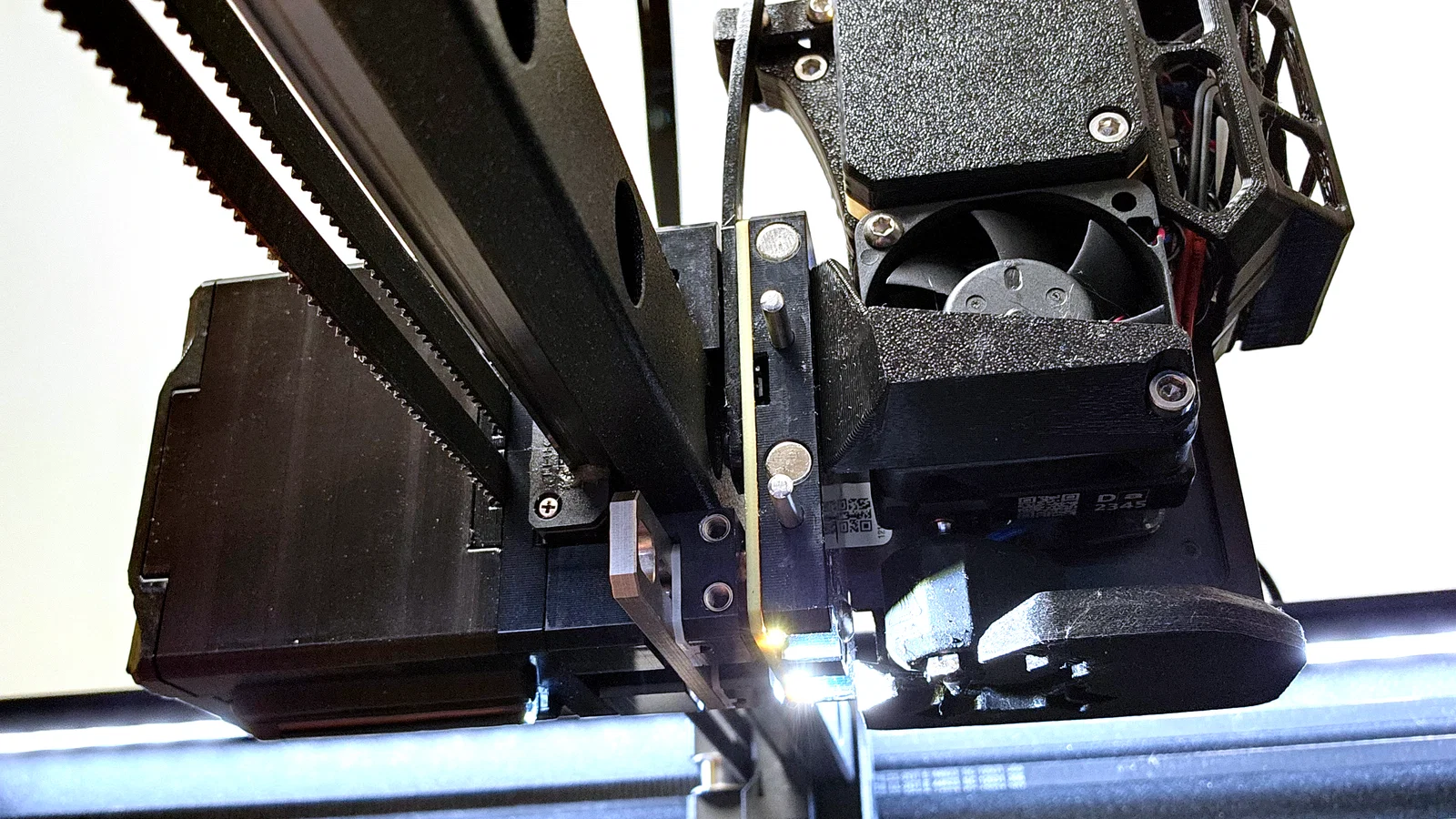
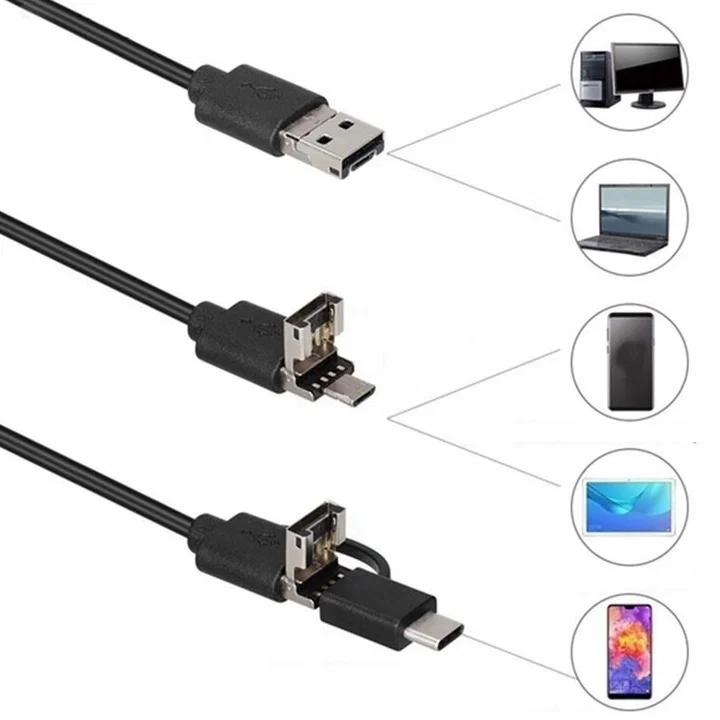
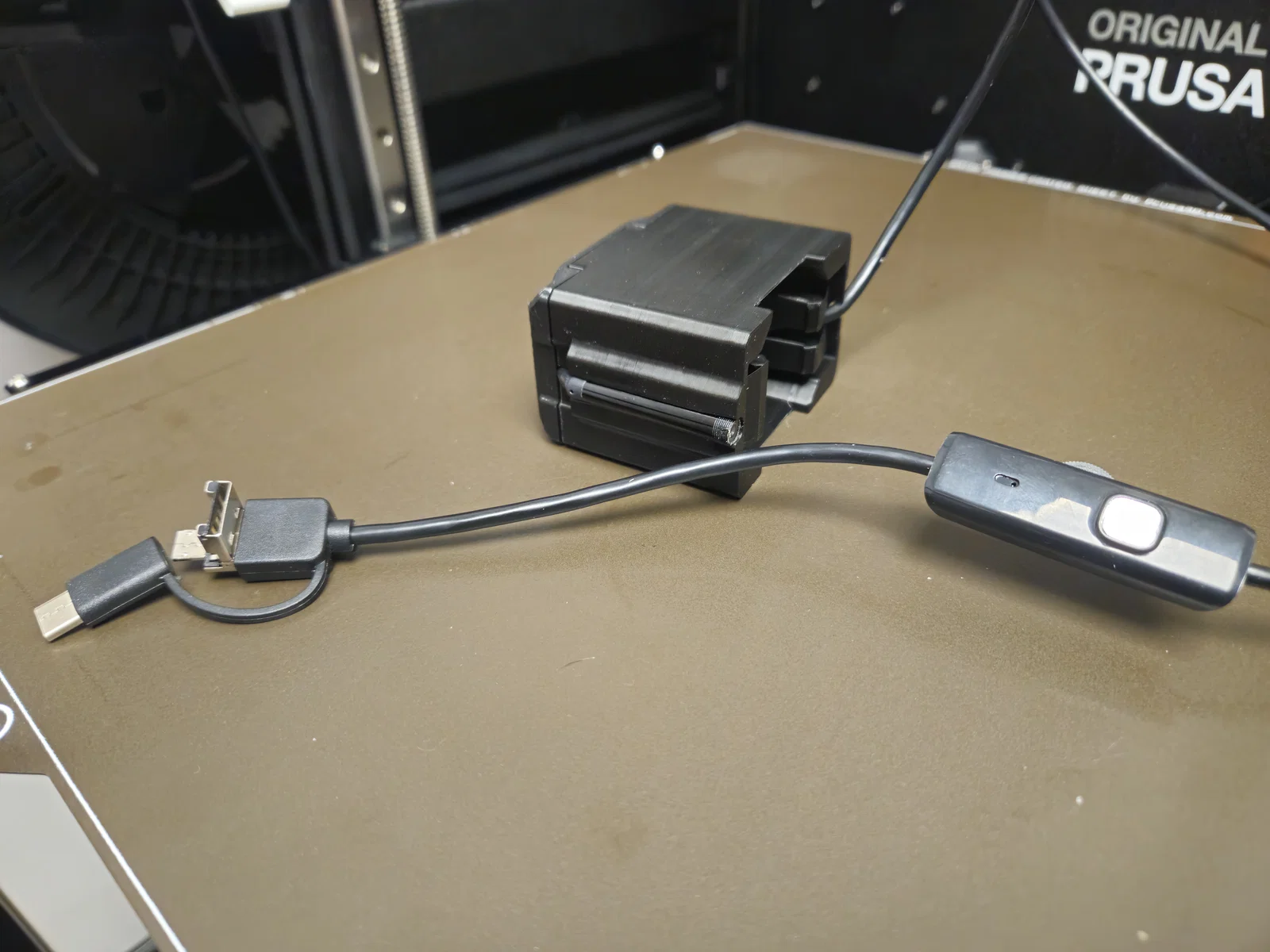
Camera nội soi (endoscope camera) là thiết bị chuyên để quan sát các khu vực khó tiếp cận. Mẫu này dạng trụ, kích thước 5.45mm x 40mm, có đèn LED. Nó kết nối USB với Raspberry Pi hoặc smartphone, setup đơn giản và nhìn rõ trong chỗ tối. Giá cũng mềm nên phù hợp cả dân chuyên lẫn người chơi. Mình mua mẫu camera ở đây, có người tìm thấy ở đây (nhưng mình không chắc có đúng cùng mẫu không, mình chưa kiểm tra).

Thiết kế:
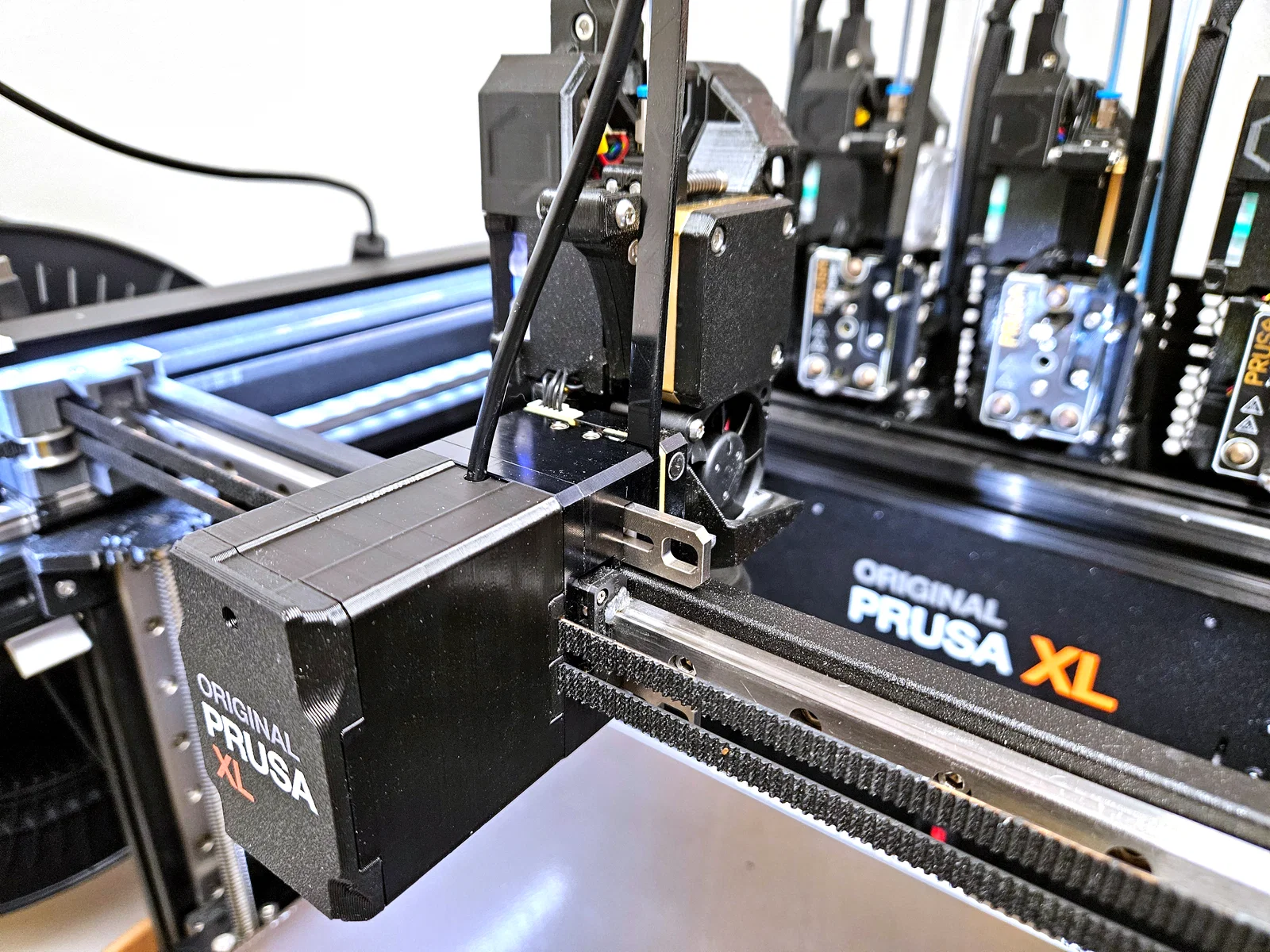
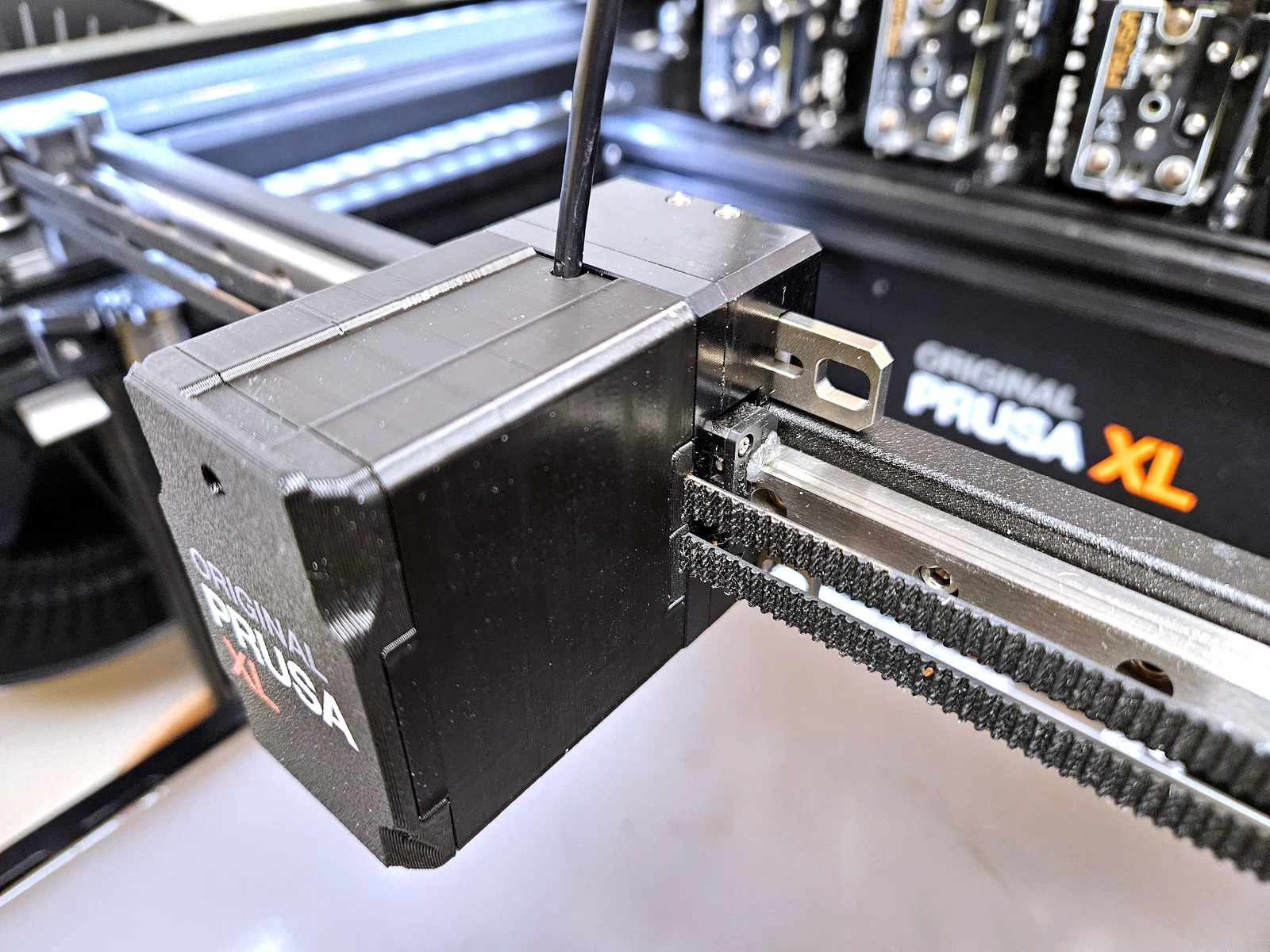
Được thiết kế để hoà hợp mượt với thẩm mỹ sẵn có, món này “ăn khớp” với Prusa XL, giúp tổng thể nhìn gọn và đẹp hơn.
Thiết kế được làm để in không cần support (mình ghét support!). Việc này cũng ảnh hưởng hướng in. Vì vậy, layer đầu tiên có vài chi tiết nhỏ dễ bị bong khỏi bed trong lúc in.

Do đó, mình quyết định làm to phần chân đế của các chi tiết này, để in xong có thể cắt gọt lại. Ngoài ra, hai phần nhô ra ở hai bên được thiết kế để bẻ bỏ, vì có một đoạn thắt lại nhằm giúp bẻ dễ hơn.


Toàn bộ dự án gồm các chi tiết khá mảnh, nên cầm nắm nhẹ tay. Lắp ráp theo kiểu snap-fit; làm từ từ và nhẹ nhàng. Do hướng in đã chọn, các lớp (layers) chạy ngang qua các ngàm snap-fit dạng lò xo, nên chúng khá giòn và dễ gãy.

Mình không thiết kế đường thoát riêng cho dây camera; bạn có thể để nguyên, hoặc tự thiết kế theo ý. Trường hợp của mình, mình dùng để gắn Raspberry Pi vào cạnh khung coreXY, rồi từ đó đi dây bằng dây rút (tương tự các dây/đai gia cường của toolhead Prusa XL). Hiện tại, cái “flexible plate of the cable bundle” (Bước 41 trong manual lắp ráp) chưa bán trên Prusa store (1,2), nhưng theo mình thì giải pháp đó cũng tương tự vậy, chỉ tiếc là… cái mình làm ra lại bị ngắn quá... \(ツ)/

Cách in:
Gần như setting tiêu chuẩn nào cũng được; mình dùng 2 outer walls và 15% infill. Mình khuyên in chậm, hoặc ít nhất giảm tốc phần outer walls để bề mặt nhìn đẹp hơn.
Nhớ giữ lại nắp x-carriage cover nguyên bản (cái có chữ “Original Prusa XL”), để gắn vào bản in này ở bước cuối.
Mình cũng khuyên nên in bằng vật liệu chịu nhiệt như PETG, ABS hoặc thậm chí CF, vì camera và phần model bị nóng khá nhiều từ bed.
Mình rất muốn nghe góp ý để cải thiện dự án này , bạn để lại trong phần bình luận giúp mình nha.
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!