Đế Gắn Động Cơ Z Có Thể Điều Chỉnh cho Ender 3 (Ender 3 / Pro / V2 / Dual Z)

Đế gắn động cơ trục Z tùy chỉnh cho dòng máy Ender-3, giúp khắc phục lỗi lệch trục. Tương thích với linh kiện zin và nâng cấp Dual Z-axis, hỗ trợ cân chỉnh trục vít chính xác, hạn chế kẹt trục (binding/wobble) để bản in đẹp hơn.





Mô tả
Phần đế gắn động cơ trục Z mặc định trên các dòng máy in Ender-3 thường không căn chỉnh trục vít chuẩn, dễ gây ra hiện tượng Z-binding/wobble làm ảnh hưởng đến chất lượng bản in.
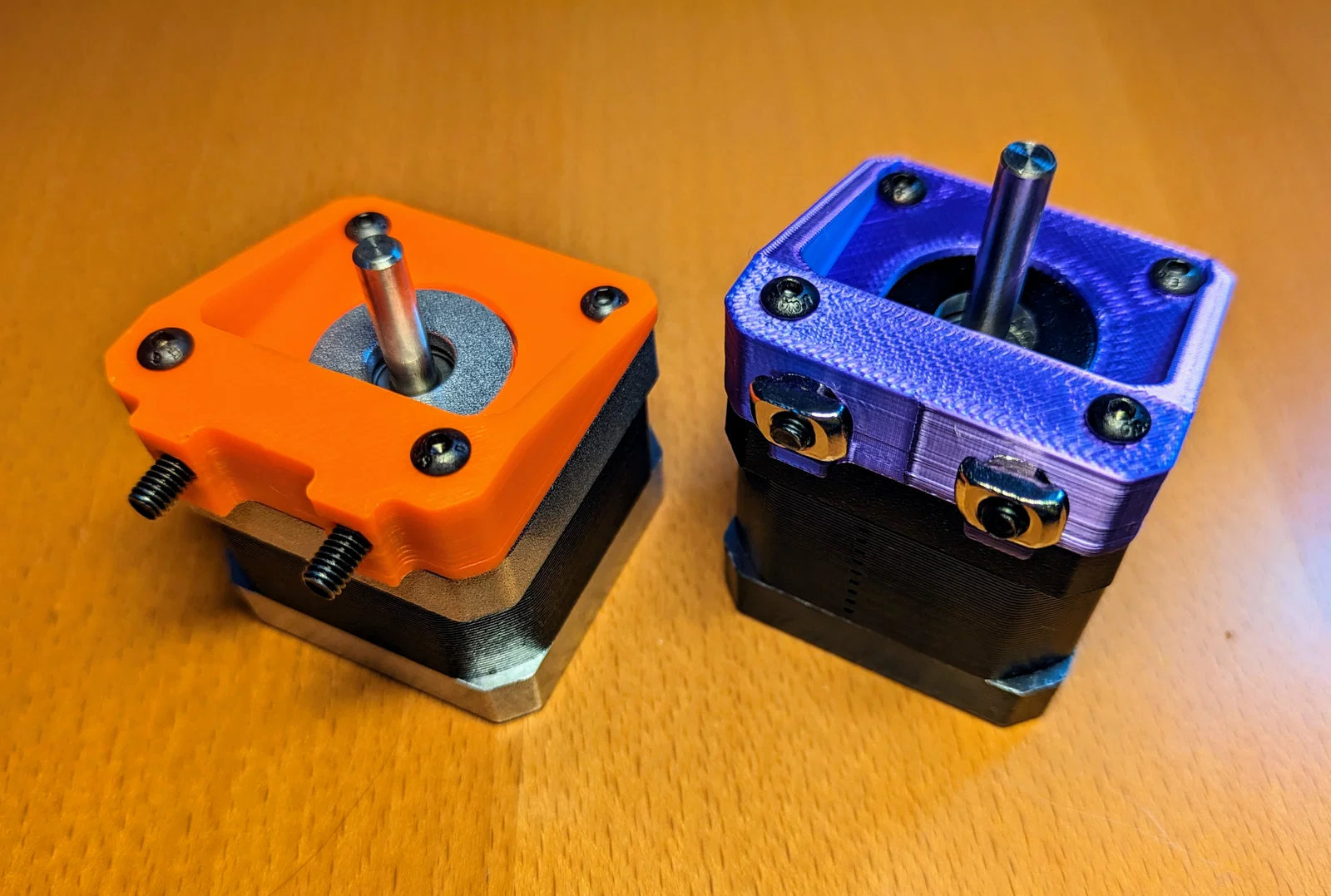
Thiết kế này gồm 2 phiên bản với các tùy chọn gắn khung khác nhau, cả hai đều có 4 khe gắn để dễ dàng điều chỉnh vị trí động cơ:
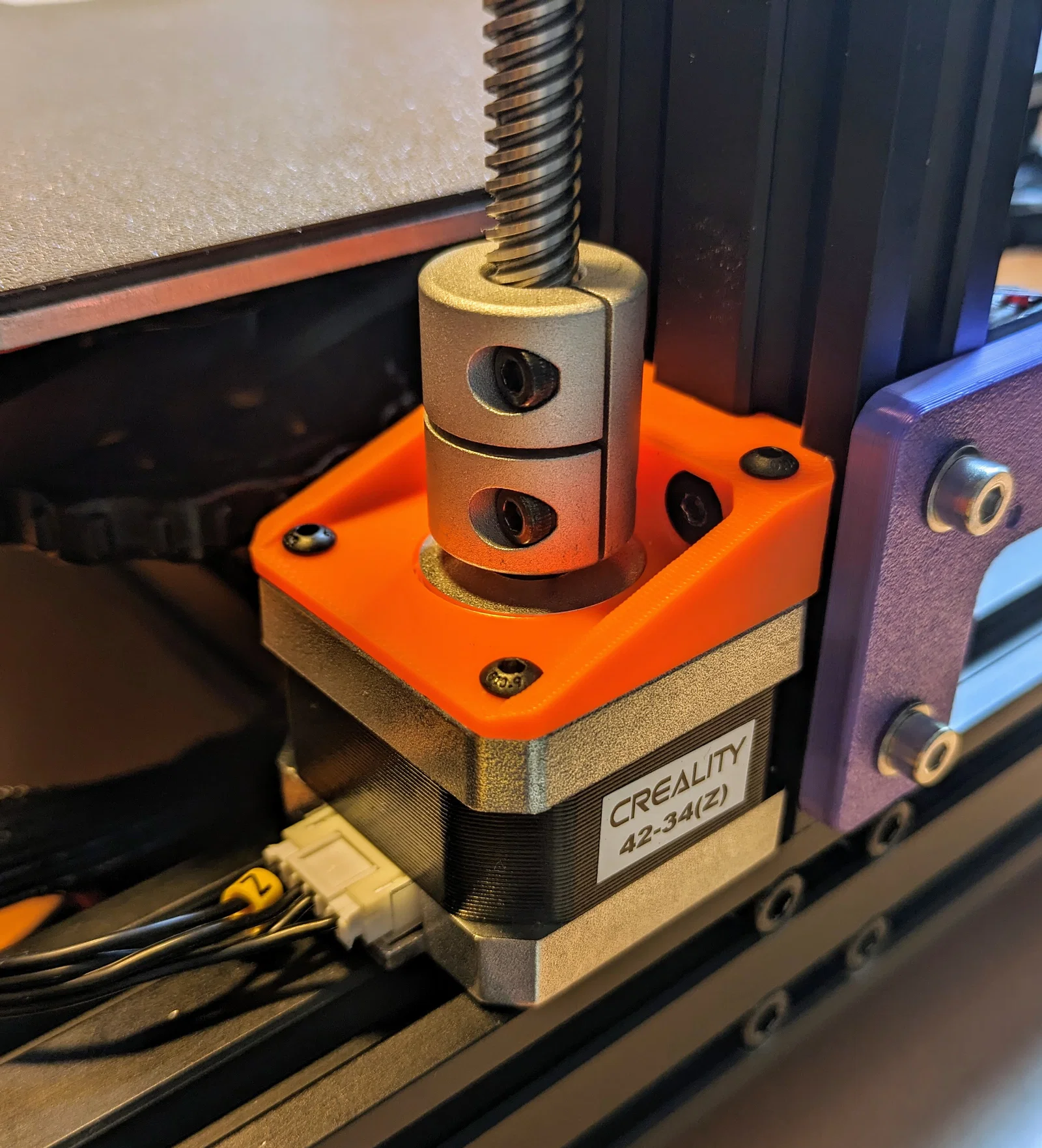
- v1.1 (bộ phận màu cam): dùng ốc vít và lỗ bắt sẵn có của máy.
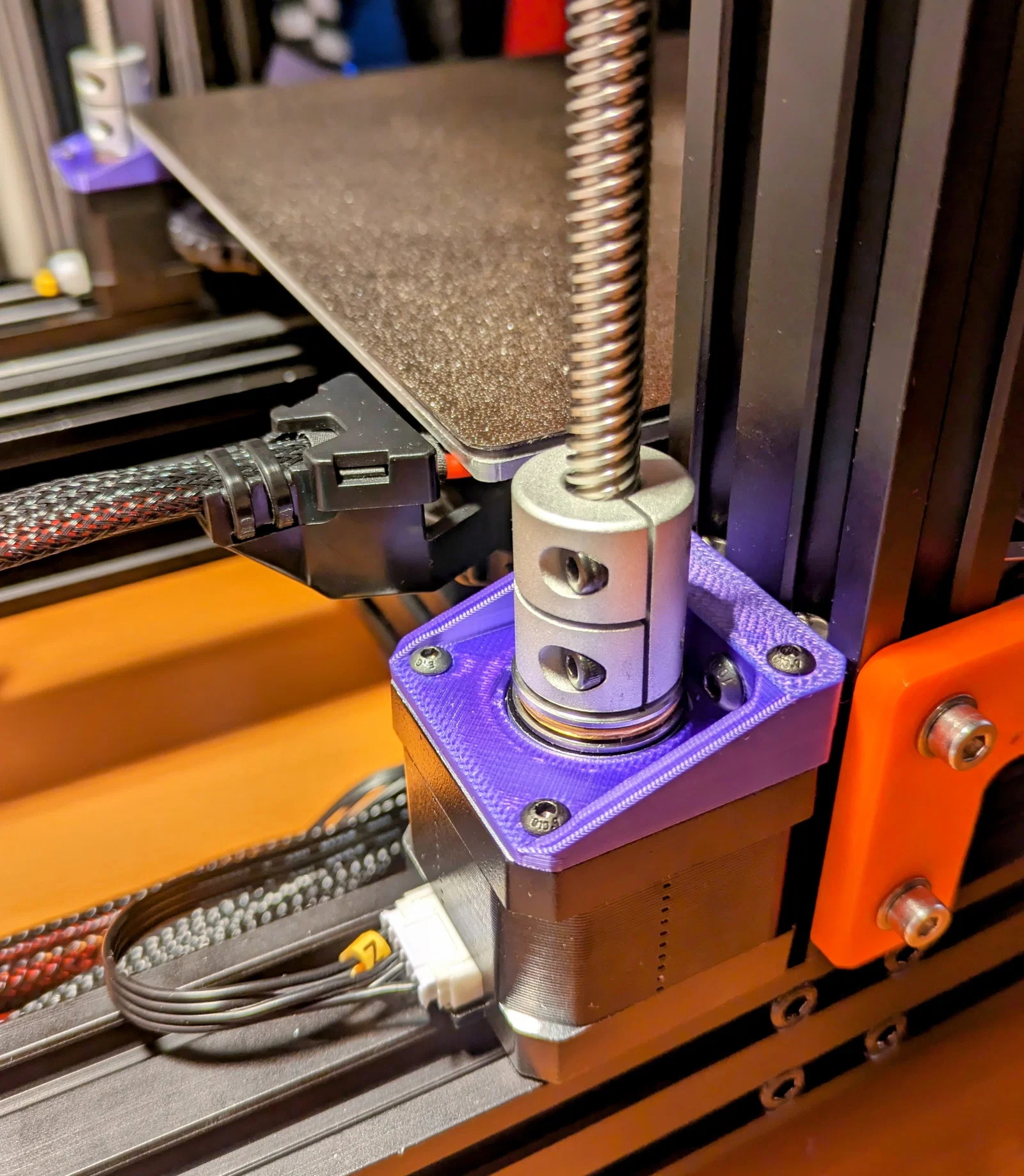
- v2.1 (bộ phận màu tím): dùng thêm ốc và T-nut cho bản nâng cấp Dual Z-axis/motor.
Lưu ý: Bạn rất nên lắp thêm Oldham coupling để bù trừ những sai lệch nhỏ và triệt tiêu vấn đề kẹt trục.
Cập nhật 04/10/2024: Thêm v1.1 và v2; xóa các file cũ. Cập nhật 25/05/2024: Cập nhật lên v2.1 và thêm hình ảnh mới. Cập nhật 05/06/2024: Cập nhật mô tả (không thay đổi file).
Chi tiết linh kiện
v1.1 (Dùng ốc zin)
- 2x ốc đầu bằng M4x18mm
- 2x ốc đầu tròn M3x16mm
- 2x ốc đầu tròn M3x6mm (ốc phụ để lắp chắc hơn; không bắt buộc)
v2.1 (Cho nâng cấp Dual Z-axis/motor)
- 2x ốc đầu tròn M4x16mm
- 2x T-nut M4
- 2x ốc đầu tròn M3x16mm
- 2x ốc đầu tròn M3x6mm
Thông số in
- Chiều cao lớp in (Layer height): 0.20mm
- Vách (Perimeters): 3 lớp
- Lớp đáy/đỉnh: 5 lớp
- Infill: 15% kiểu Gyroid
Hướng dẫn lắp đặt
Tháo linh kiện cũ
- Rút cáp động cơ Z và tháo đế gắn động cơ zin.
- Nới lỏng ốc siết phía dưới của khớp nối trục động cơ Z.
- Nâng trục ngang (gantry) lên và chèn vật cố định bên dưới để giữ.
Lắp đặt
- Gá lỏng chi tiết in vào động cơ bằng 2 ốc M3x16mm và 2 ốc M3x6mm.
- Gắn động cơ vào khung máy bằng ốc vít tương ứng:
- v1.1 - 2x ốc đầu bằng M4x18mm
- v2.1 - 2x ốc đầu tròn M4x16mm và 2x T-nut M4
- Gắn khớp nối trục Z và siết chặt ốc.
- Điều chỉnh động cơ cho đến khi trục vít song song với khung máy, sau đó siết chặt tất cả ốc.
- Di chuyển trục ngang lên cao nhất để kiểm tra xem có bị kẹt hay không.
- Cắm lại cáp động cơ Z, thực hiện cân bàn và chạy các bài kiểm tra cần thiết.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!