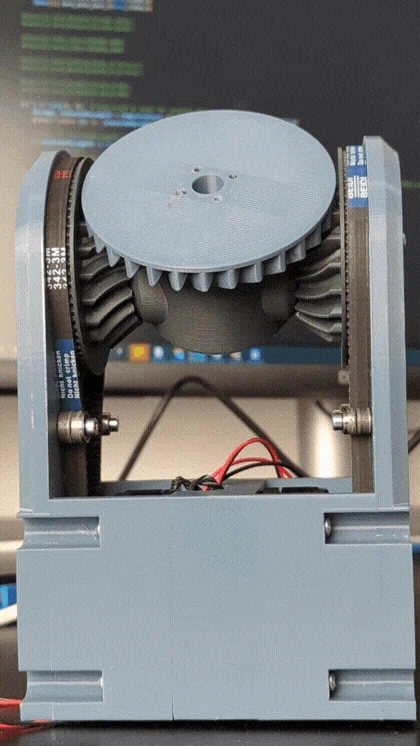
Cổ tay robot vi sai (Differential robot wrist)

Mẫu cổ tay robot dùng cơ cấu differential được open-source từ sớm do nhu cầu build cao. Đây là test fixture để thử nghiệm cho các robot tương lai, kèm BOM, STL, hướng dẫn lắp ráp, calibrate driver và code mẫu trên GitHub.
Mô tả
Do nhu cầu anh em muốn build cơ cấu differential xịn sò này quá nhiều nên tụi mình quyết định open-source luôn, dù dự án mới đang ở giai đoạn đầu.
Lưu ý đây là bộ test fixture tụi mình thiết kế để thử cơ cấu cho các robot tương lai!
Bạn có thể xem thêm thông tin trên GitHub: https://github.com/PCrnjak/Differential-robot-wrist
How to make it?
Step 1 - Chuẩn bị đầy đủ linh kiện theo BOM
Step 2 - In tất cả chi tiết trong thư mục STL (lưu ý có vài chi tiết cần in 2 cái)
Step 3 - Lắp cụm differential và calibrate driver
Step 4 - Nạp chương trình và test! Code mẫu!
Step 5 - Tận hưởng cơ cấu differential của bạn!
Giấy phép

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!